Изобретение относится к гидроавтоматике и может быть t-.спользовано в системах управления промышленных роботов и манипуляторов.
Целью изобретения является повышение точности и устойчивости и расширение функциональных возможностей.
На фиг. 1 изображена принципиальная схема электрогидравлического следящего привода робота; на фиг. 2 - кинематическая схема исполнительного механизма.
Электрогидравлический следящий привод робота содержит последовательно соединенные измеритель 1 рассогласования, первое дифференцирующее звено 2 с замедлением, блок 3 деления, второе дифференцирующее звено 4 с замедлением, первый блок 5 умножения, первый сумматор 6, второй блок 7 умножения, первый усилитель 8 привод 9 регулирующего органа насоса 10, связанного гидролиниями 11 и 12 с гидромотором 13, выходной вал 14 которого кинематически связан исполнительным механизмом с рабочим органом робота и датчиком 15 положения, подключенным своим выходом к второму входу измерителя 1 рассогласования, выход которого через апериодическое звено 16 второго порядка подключен к второму входу первого сумматора 6, последовательно соединенные первый источник 17 опорного напряжения, второй, сумматор 18, третий блок 19 умножения и третий сумматор 20, к второму входу которого подключен выход второго источника 21 опорного напряжения, последовательно соединенные датчик 22 усилия рабочего органа (схватз), четвертый сумматор 23, к второму входу которого подключен выход третьего источника 24 опорного напряжения, четвертый блок 25 умножения, к второму входу которого подключен выход датчика 26
5
0
5
0
5
0
5
0
5
скорости третьей степени подвижности исполнительного механизма, и пятый блок 27 умножения, последовательно соединенные шестой блок 28 умножения и апериодическое звено 29, выход которого подключен к третьему входу первого сумматора 6, последовательно соединенные седьмой блок 30 умножения и второе апериодическое звено 31, выход которого подключен к четвертому входу первого сумматора 6, а также последовательно соединенные четвертый источник 32 опорного напряжения, пятый сумматор 33, второй усилитель 34, выход которого подключен к второму входу второго блока 7 умножения. Выход датчика 22 подключен к второму входу третьего блока 19 умножения. Первый вход шестого блока 28 умножения соединен с выходом блока 3 деления и первым входом седьмого блока 30 умножения, а второй вход - с выходом пятого блока 27 умножения. Выход третьего сумматора 20 подключен к вторым входам первого и седьмого блоков 5 И 30 умножения о Вход делителя блока 3 деления соединен с выходом пятого сумматора 33, второй вход которого соединен с выходом пятого блока 27 умножения. Кроме того, привод содержит первый и второй датчики 35 и 36 положения третьей степени подвижности, объединенные в одном корпусе и установленные на третьей степени подвижности исполнительного механизма, имеющего звенья 37-39, причем выход первого датчика 35 подключен к вторым входам второго и третьего сумматоров 18 и 20, а выход второго датчика 36 гидромотора - с вторым входом пятого блока 27 умножения. На выходе уста- новлен редуктор (не показан).
i
Электрогидравлический следящий
привод робота работает следующим образом.
51557371б
На вход измерителя 1 рассогласования подается управляющее воздействие q, обеспечивающее требуемый закон управления. На выходе измерителя 1 вырабатывается сигнал ошибки & , который в блоках 2, 3, , 5, 7и 16 усиливается и поступает на привод
регулирующего органа насоса 10, который, создавая поток- рабочей жидкости ,„ т ,, ,- N в гидролиниях 11 и 12, воздействует 10 Г
Ч
+ (т2 + т, + т4 + т2) -
- момент инерции звена
37относительно про- г дольной оси;
11 (1 +т-Ц) - момент инерции звена
38при вращении его
г относительно звена 3
39 при вращении его относительно звена 3&
на гидромотор 13 с редуктором, выходной вал которого изменяет положение рабочего органа, т.е. уменьшает рассогласование о . Привод при работе с различными грузами также за счет взаимовлияния степеней подвижности исполнительного механизма обладает переменными моментными характеристиками, которые могут меняться в широ- ких пределах, что снижает качественные показатели работы привода и приводит к потере устойчивости его работы .
Параметрами работы привода являются:
q - сигнал желаемого положения на входе измерителя 4i It Ч$ соответствующие обобщенные координаты звеньев 37, 38 и 39 исполнительного механизма;
-скорость изменения обобщенной координаты
о - ошибка привода (величина
рассогласования); т2, п3 т4 - соответственно массы звеньев 37, 38 и 39;
-масса захваченного схва- том груза;
3
40
- 2(13 + I,)l4cos q,)) + ((1, +
-расстояние от центра масс
звена 38 до оси вращения; t + 1,) + (1 + I,,)1 - 2(1 + 1)(1 +
-расстояние от центра масс
звена 39 до оси вращения; + у cos q + 2q ч q5sin q,(l3 + 1,) 1ф - расстояние от центра масс
звена 39 до центра схва- 45 + 2q q Sinq3(l + )(1 + та.3
Кинетическая энергия всех движущих- + 4)щ ся масс исполнительного механизма
Г
Ч
+ т4 + т2) -
- момент инерции звена
37относительно про- дольной оси;
- момент инерции звена
38при вращении его
относительно звена 37;
т ,, ,- N Г
39 при вращении его относительно звена 3&;
Ч М4 моменты инерции звеньев 38 и 39 относительно поперечной оси, проходящей через центр масс;
I- момент инерции вращающихся частей гидромотора 13 и вращающихся частей редуктора, приведенных к валу И. Учитывая, что
9т
.
3q7 Ч l5 + Ч( + Va } + + q, ( + m4((lj + 1,) -f 1
Ч30
- 2 (1, + 13) q,))+ q,m2
x((l
13) + dt + Ц)1- 2( +
+ 13)(1 + 1) cos
jtaq;
+ q, („ + ra4((l} + 1)г + ij q ( ISe + q, (IN, + n,) +
40
- 2(13 + I,)l4cos q,)) + ((1, +


| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод робота | 1989 |
|
SU1723360A1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2012 |
|
RU2488479C1 |
| Устройство для управления приводом робота | 1983 |
|
SU1352450A1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2041054C1 |
| Устройство для управления приводом манипулятора | 1987 |
|
SU1496999A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1432280A2 |

Изобретение относится к гидроавтоматике и может быть использовано в системах управления промышленных роботов и манипуляторов. Целью изобретения является повышение точности и устойчивости и расширение функциональных возможностей. Исполнительный механизм привода выполнен с тремя степенями подвижности. За счет непрерывной подстройки параметров коррекции обеспечивается инвариантность свойств привода к переменным характеристикам нагрузки. Подстройка параметров осуществляется на основе информации о моментных воздействиях на привод. Эта информация формируется третьим сумматором 20, пятым блоком 27 умножения и пятым сумматором 33, а с помощью первого и второго блоков 5, 7 умножения, шестого блока 28 умножения и блока 3 деления вводится цепь управления гидропередачей. 2 ил.
50
,г
151 2.I5-U.I4-2.
т Г q 2 q- Г q з +
т2(1 + 1ч)2 -2 ,,. 2Ч N3 тэ(14
+ (13 + 1з) - 2 (13 + I})1 14 cosq,))где составлянэщал
ч55
x|i + m4 ((1 + 15)4+ (1 +
г
можно считать, что моментное воздействие движущихся масс
МИ- H(q9, тг)4 т + h(q5, q, npq, ,
H(q3, m2) 15г + IN3 + TNf+
- 2(1, + 15)U + u cos q3)3l + t+ mjlji+ a((1« + lj}«- + 2(1 +.
50
можно считать, что моментное воздействие движущихся масс
МИ- H(q9, тг)4 т + h(q5, q, npq, ,
H(q3, m2) 15г + IN3 + TNf+
&Я
+ I3)l4cos q3) + ma ((Ц + 1,) + + (1 + 14)4- 2(1 + IjHl + 14) Ч cos q},
составляющая
Ј &
h(q4, q%, m4) 2(1, + 1) q, ( 10
+ m-i(l 4. + Iq.) sin q 5.
Передаточная функция разомкнутого привода может быть представлена в виде:
15573718
-символ дифференцирования;
-передаточная функция привода;
15
W(P) Wa(P).Wp(P).WHrM х Wk(Р),
где Р W(P)
W«,(P) и
wf(P)
- соответственно передаточные функции усилителя 8 и регулирующего органа насоса 10;
Wk(P) - передаточная функция коррекции;
Л(Р) - передаточная функция гидропередачи, состоящей из насоса 10 и гидромотора 13. Передаточная функция гидропереда- (Р)х чи с учетом утечки рабочей жидкости имеет вид:
W
нгм4
)
3j(t) |ииьэ
20
1
ХР
ylt5 7(H ; iiLZY r рг Г1н1+1|1Пчк7: : hv
4cE(L3h + 0,01WJ i)KE (L3h + 0,01W| i);
Коррекция WK(P) осуществляется с помощью апериодического звена 16 ющего органа насоса 1П; второго порядка с передаточной функгде А1, У m ° текущий и максимальный углы поворота регулируцией
„ W и И лв
К - s О m
W«(P)
1
W (Р) ---1-
№ т,р + 1
6Xi/ (т,р ( )
где КЕ - постоянный коэффициент;
ip - передаточное отношение ре- 35 двух дифференцирующих звеньев 2 и k
дуктора;с замедлением, причем передаточные
WQ - характерный объем гидромо- функции последних W(P) и W4(P)
тора 13;.имеют вид:
W - характерный объем насоса
Ю;- 40
$3дв- скорость вращения насоса
V - объем рабочей жидкости ) 2
гидролинии 11 нагнетания
и полости нагнетания насо- 45 гДе Ki /KE v са 10;
Lg - утечка рабочей жидкости. Из последнего выражения видно, что параметры передаточной функции являются переменными и зависят от WK(P), а также от Ц. В результате значительно изменяются и динамические свойства электрогидравлического следящего привода. Для сохранения неизменных динамических свойств
50
Т4Р + Г
а также апериодических звеньев 29 и 31 с передаточными функциями:
vp) T-pVy
м (Р)
w,,w + г
55
Параметры Т( и Т выбирают достаточно малыми с целью придания привод необходимых динамических свойств.
электрогидравлического следящего привода необходимо застабилизировать все параметры передаточной функции W(P) .
где Р W(P)
W«,(P) и
wf(P)
Л( Пер и с у меет
W
нгм4
iЈ
ХР
Ко с пом второ
цией
W«(P)
1
6Xi/ (т,р (
W (Р) ---1-
№ т,р + 1
2
Т4Р + Г
а также апериодических звеньев 29 и 31 с передаточными функциями:
vp) T-pVy
м (Р)
w,,w + г
Параметры Т( и Т выбирают достаточно малыми с целью придания приводу необходимых динамических свойств.
Для непрерывной подстройки параметров коррекции WK(P) по текущим
значениям H (qv тг) ; h (сц, q3, m4; и Ъэ используются блоки 5, 30 и 28, на вторые входы которых подаются сигналы, пропорциональные H + lip и h соответственно.
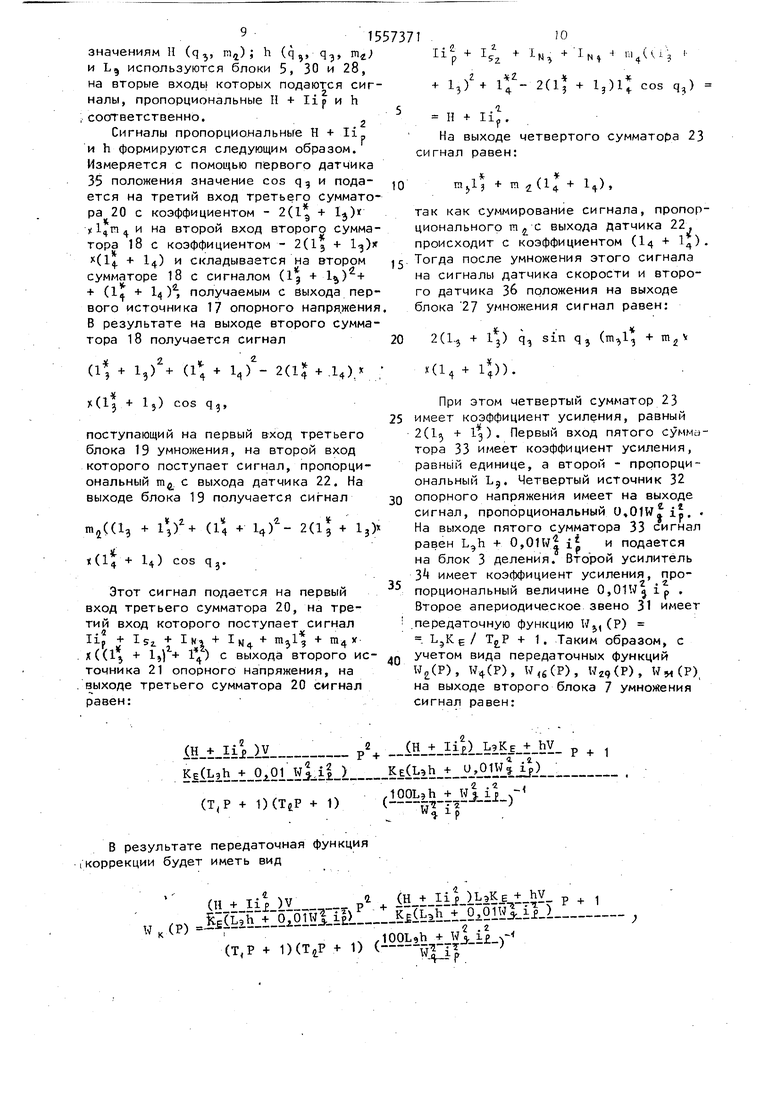
Сигналы пропорциональные Н + 11. и h формируются следующим образом. Измеряется с помощью первого датчика 35 положения значение cos q3 и подается на третий вход третьего сумматора 20 с коэффициентом - 2(1 + 1) и на второй вход второго сумма ЈР +
10 J-N, + JN- n4Ui
+ 13) + 1 - 2(1 + l,)lj cos q,)
H + li
f
На выходе четвертого сумматора 23 сигнал равен:
10
lHjl, +
п
а:+1,
-4 т M)
так как суммирование сигнала, пропорционального выхода датчика 22.
тора 18 с коэффициентом - 2(1 + Ц) происходит с коэффициентом (14 + 1). (1. + 14) и складывается на втором сумматоре 18 с сигналом (1 + 1%)2+ + (1ц + l ) получаемым с выхода первого источника 17 опорного напряжения. В результате на выходе второго сумматора 18 получается сигнал
15 Тогда после умножения этого сигнала на сигналы датчика скорости и второго датчика 3& положения на выходе блока 27 умножения сигнал равен:
20
2(Ц + 13) Чэ sin 4} ( +
т,
(1, + 1,)2 +
(
Ц) - 2(1 + 14) х
x(lj + 1}) cos q
поступающий на первый вход третьего блока 19 умножения, на второй вход которого поступает сигнал, пропорциональный т4 с выхода датчика 22. На выходе блока 19 получается сигнал
та((13 + 1)г+ (4 + Ц)4- 2(1
3 + Ц
ы
к(14 + 14) cos q 3.
Этот сигнал подается на первый вход третьего сумматора 20, на третий вход которого поступает сигнал up + Is2. + K| + 1«4 + т31, + пцх х((1} + 1,) + ) с выхода второго иточника 21 опорного напряжения, на выходе третьего сумматора 20 сигнал равен:
()ҐР2+ i5 ± IiЈLLiKj + hv р + 1
KE(,
( + i)(T,P + D ()
В результате передаточная функция (Коррекции будет иметь вид
(н + iii )vpu + (H i Hj-lLi i Y p + 1
(Р, s binal.J ibiiL.-1
WK( ч ,100L,h + WJ. iЈ
(T,P + D(Ttp D (wHI }
ЈР +
10 J-N, + JN- n4Ui
+ 13) + 1 - 2(1 + l,)lj cos q,)
H + li
f
На выходе четвертого сумматора 23 сигнал равен:
lHjl, +
п
а:+1,
-4 т M)
происходит с коэффициентом (14 + 1).
Тогда после умножения этого сигнала на сигналы датчика скорости и второго датчика 3& положения на выходе блока 27 умножения сигнал равен:
происходит с коэффициентом (14 +
20
2(Ц + 13) Чэ sin 4} ( +
т,
к(1.
ll)).
При этом четвертый сумматор 23 25 имеет коэффициент усиления, равный 2(1 + 1). Первый вход пятого сумматора 33 имеет коэффициент усиления, равный единице, а второй - пропорциональный L9. Четвертый источник 32 Зо опорного напряжения имеет на выходе
сигнал, пропорциональный 0 0iw5ip. . На выходе пятого сумматора 33 сигнал равен ЦЬ + 0,01W| i и подается на блок 3 деления. Второй усилитель имеет коэффициент усиления, с2. 4
порциональный величине 0,01Wj ip . Второе апериодическое звено 31 имеет передаточную функцию W&1(P) L9Kе/ + 1. Таким образом, с 40 учетом виДа передаточных функций
WЈ(P), W(P), W46(P), WZ9(P), WM(P), на выходе второго блока 7 умножения сигнал равен:
j
а передаточная функция прямой цепи разомкнутого привода имеет вид:
полнительного органа, четвертый сум матор, к второму входу которого под ключен выход третьего источника опо
17/тл KJ ничем оылид iptsibtiiu источника опо
W(P) Wy WH(P) ----J--l---- ного напряжения, четвертый блок умножения, к второму входу которого п ключен выход датчика скорости, и пя тый блок умножения, последовательно соединенные шестой блок умножения и апериодическое звено, выход которог подключен к третьму входу первого сумматора, последовательно соединен ные седьмой блок умножения и второе апериодическое звено, выход которог подключен к четвертому входу первог сумматора, а также последовательно связанные четвертый источник опорно |Го напряжения, пятый сумматор, втор усилитель, выход которого подключен к второму входу второго блока умножения, причем выход датчика усилия подключен к второму входу третье го блока умножения, первый вход шес того блока умножения соединен с выходом блока деления и первым входом седьмого блока умножения, а второй вход - с выходом пятого блока умножения, выход третьего сумматора под ключен к вторым входам первого и седьмого блоков умножения, а вход делителя блока деления соединен с выходом пятого сумматора, второй вход которого соединен с выходом пя того -блока умножения, отличаю щийся тем, что, с целью повыше ния точности и устойчивости и расши рения функциональных возможностей, исполнительный механизм выполнение тремя степенями подвижности и снабже первым и вторым датчиками положения третьей степени подвижности, причем выход первого датчика подключен к вторым входам второго и третьего сум маторов, а выход второго датчика - к второму входу пятого блока умножения.
Таким образом, все параметры переаточной функции при введении коррекии остаются постоянными., а следоваельно, постоянными будут сохраняться ю динамические свойства и качественные показатели всего электрогидравлического следящего привода, т.е. точность устойчивость не будут зависеть от Н и h, в приводе обеспечена желаемая 15 инвариантность к нагрузочным характеристикам.
Формула изобретения
20
Электрогидравлический следящий привод робота, содержащий последовательно соединенные измеритель рассогласования, первое дифференцирующее звено с замедлением, блок деления, 25 второе дифференцирующее звено с замедлением, первый блок умножения, первый сумматор, второй блок умножения, первый усилитель, привод регули- рующего органа насоса, связанного 30 гидролиниями с гидромотором, выходной вал которого кинематически связан исполнительным механизмом с рабочим органом робота и с датчиком положения, подключенным выходом к второму входу измерителя рассогласования, выход которого через апериодическое звено второго порядка подключен к второму входу первого сумматора, последовательно соединенные первый ис- до точник опорного напряжения, второй сумматор, третий блок умножения и третий сумматор, к второму входу которого подключен выход второго источника опорного напряжения, последова- 45 тельно соединенные датчик усилия ис35
155737112
полнительного органа, четвертый матор, к второму входу которого ключен выход третьего источника KJ ничем оылид iptsibtiiu источника
ного напряжения, четвертый блок 5
0
5 0 о 5
5
ножения, к второму входу которого подключен выход датчика скорости, и пятый блок умножения, последовательно соединенные шестой блок умножения и апериодическое звено, выход которого подключен к третьму входу первого сумматора, последовательно соединенные седьмой блок умножения и второе апериодическое звено, выход которого подключен к четвертому входу первого сумматора, а также последовательно связанные четвертый источник опорно- |Го напряжения, пятый сумматор, второй усилитель, выход которого подключен к второму входу второго блока умножения, причем выход датчика усилия подключен к второму входу третье™ го блока умножения, первый вход шестого блока умножения соединен с выходом блока деления и первым входом седьмого блока умножения, а второй вход - с выходом пятого блока умножения, выход третьего сумматора подключен к вторым входам первого и седьмого блоков умножения, а вход делителя блока деления соединен с выходом пятого сумматора, второй вход которого соединен с выходом пятого -блока умножения, отличающийся тем, что, с целью повышения точности и устойчивости и расширения функциональных возможностей, исполнительный механизм выполнение тремя степенями подвижности и снабжен первым и вторым датчиками положения третьей степени подвижности, причем выход первого датчика подключен к вторым входам второго и третьего сумматоров, а выход второго датчика - к второму входу пятого блока умножения.
ft/8.2
| Электрогидравлический следящий привод | 1987 |
|
SU1432280A2 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
