1
I1:t()6peieiine относится к средствам зашиты от HH6)aiuiH рач.чичных объектов.
Цель ичобретеиия повышение :|ффек- тивности зашиты CJT вибраций счет расширения диапазона рабочих частот.
На чертеже изоб)ажена схема )изо- jiHTopa с автома ическим упранлением.
Виб)оизолятор с автоматическим управлением содержи последовательно С1)едипен- иые перавножестки11 упругий элемент 1, и дои()лните. 1ьный упругий
9
: лемеит 3. соединенный с его вне1пни.м от зашишаемо|() обт,екта 4 концом, нибровоз- , 1ь 5, соединенный с ним В1 1ходом блок Г) управ.ления, со1.таеук)ший усилитель 7, вход которого соединен с динамометром 2, датчик 8 1 заимного перем1миения защищаемого обьекга 4 и к().теблк)П1егося объекта 9, ана. юговый сумм агор И), выход которого иодк.иочен к блоку ti управления, а (.)дип из входов к согласуюии му уеи. 1ите- .1К) 7, и Д()||олнител1)НЬ1Й сог. 1асук)П1нй усилитель II, ик, 1К)чеин1) между датчиком 8 и другим 1(Х()Д()м ана, 1о1 ового счмматора К).
хюк () уп 1аиления В1)И1олиен в виде но- с,1едовате, 1ьпо 1оединенп1 г ко)Н кт1)ук)- nu io иепа 11 и угп,1ителя 13 .мопиюсти.
. loiio. 1пите,ты1Ы| | У11ру1 ий :), ieMciri 3 мо- же1 I) 1Я)111о, и виде пи. шидрической пружины г )уемым юджатием.
i 1ер.11,11 1жгс кий Tipyi ий I M(J- жет б1,. 11;,п1о, П1ен и ниде п()1Медон;гп Л дю (,(1едиН1 11Н1,1 впгропзолятора 14 и метал- ,.iac i MKiiiio:о .чемеита 15, п сдс гаи, 1якм11сго собой паке чер1мун) 1 лоев метал- , la и i. lac ично: о м атернала.
1 К пол ь fi iHanMc мета, 1, аетпк1))(1| о -j,ne- vcH ia i:ii .BI iMei роа/шзовагь 11, обходпм(К com но HUM Иг /Ki C i-KocToii неравпг1/к1Ч гкого 1 и дополни I г. :ьн()го 3 упругих i.ieMcfiToii ш рабоче1| к П ,иброизо, 1ятора п по 110|)ма, 1И к iieii.
И качестве .1агчпка сЧ взаимного перемещения об ьсктов 4 п 9 может б1)1ть испо.чьзо- вап гокови)евой и,1н индуктивны11.
К|), 11,цевая 16 вк,:ш)чена парал- ле,тьно допо, пп :е,П)1ом уп)уг()му з.чементу 3 и соединен;: с по.ишжпой катуи1кой впбро- возпудт е, 1я Г).
Вибсхшзоля гор с автоматическим управ- ле1И1ем работае : следукиним обра.зом.
При К1 ioM ы каналах уира1 ления 1нап)имер, при отключении аналогового суммато 1а И) ог б,1ока 6 управления) ко,теб. 1Ю:ПИ |ся об 9, Д(ч})ормируя ие- равнож1 cTKHii 1 и донолните, 1ьн1 П1 З yiipv- iTie -(.лемситы, 1)здает силовое возбуждение заи1П1па1 мо о :)б ьекта 4, ()преде,|1яемое )а- венством
X,
(1)
Ki -к
К,4-К,
координаты колеблюшего 9 и за1цинхаемого 4 объектов;
2
К| и K.i- коэффициенты жесткости не- равножесткого I и дополнительного 3 упругих элементов.
При установке роторных ме.ханизмов 5 усилие f имеет полигармонический ,харак- тер с ярко выраженными вибрационными составляющими на частоте оборотов вала и ее гармоника,ч. Это усилие возбуждает нолигармоническую вибрацию защищаемого объекта 4,
10 При включенном канале управления по относительному перемещению вибровозбудитель 5 развивает пару управляющих сил 1у, приложенных к концам дополнительного упругою ::1лемента 3, причем каждая из этих
- J- сил равна
fy K,(X3 X,),(2)
где Кх коэффициент передачи последовательно вк:1юченных датчика 8 перемеше- ний, сргласуюшего усилителя И, аналогового сумматора 10. блока 6 управления и
20 вибровозбудителя 5,
Унравляюшая сила f, создает компенсирующее усилие, действуюшее па зашишае- Mbiii об ьект 4 и равное
(3)
Z9 Zi
5 f K(:s-X.,}-
кrjг7
7 4 As л 1
Z,
где X,,, Z и Z - упругие и инерци(М1пые механические сопротивления пepaвн(Jжecт- Q когч) 1 и доиолнительно1 о ,3 упругих элемен- 14)в и 9.
В зарезонансной области виброизолятора, где обычно расположен|11 наибо,1ее И1ггенсивные составляющие вибрации, IJ OP мула (3) упрощается и имеет вид
5 г 1/- , V
I.
К,(Х, X,
(4|
К,Ж.
в режиме полной компенсации вибрационных СИ.-1, т.е. при f-B+f-n O, имеем: К Kj,
0 т.е. при коэффициенте передачи канала управления по относительному перемещению численно равном жесткости дополнительного упругого элемента 3, на защищаемом объекте 4 происходит полная компенсация вибрационных сил f .
Ус,ловие (5) может быть вьп:олнено в широкой полосе частот, поэтому виброизо- ;1ируюп1ее устройство обеспечивает одновременное гашение всех вибрационных составляющих, расположенных в диапазоне
Q Э(|)фективпо1 о управления.
Для увеличения эффективности вибро- изо. штора между неравножестким упругим элементом 1 и донолнительным упругим элементом 3 установлен динамометр 2, который через согласующий усилитель 7 и
5 аналоговый сумматор 10 подключен к блоку 6 управления. При этом в электромеханической системе управления виброизоли- рую1цего устройства одновременно происло
лит компенсация вибрационных сил, acii- стБующих на занипцаемы 4, и автоматическая 1иними:1ация О1иибки нронес- са компенсации, т.е. реализуется комбинированное управление, характеризующееся максимальной эффективностью и наи.луч- шими качественными показателями.
Применение донолнитепыюго упругого элемента 3 в виде витой нружины с регулируемым поджатием обеспечивает но, 1нук) разгрузку кольцевой мембраны от веса ме- .чанизма, что увеличивает надежность работы вибровозбудителя, а при использовании улектромаг нитн()1 о вибр(.)возбудите.тя, кроме Toi o, уменьшается коэффициент нелинейных искажений, что необ.ходимо для эфс()ективного управления. Уве.личенпая поперечная жесткость витой пружины вместе с поперечной жесткоегью кольцевой мембраны устраняют возможность перекосов подвижной кату1нки электродинамического виб- ровозбудите,ля.
Иciloльз(JBaпиe 11редлагаемо1 о виброизолятора с автоматическим уп)ав„чением (пс сравнению с известными) уменьшает динамические нагрузки, цриходяп1иеся на пбьек- ты зан1ит1)1 от вибраций, что ii.)Bbiniae-i надежность их работы.
Форм у л и и.ч обр с ген и я
I. Вибронзо.лятор с aвт Jмaтичecким управлением, соде)жаший соединенные по5
0 0
5
следовательно иеравножесткии Н11угии э, 1е- мент, динамомегр и донолш ге,1ьны1| упругий элемент, соединенный с eio иьччнним от за- пипцаемою обтлжта копцом вибронозб ди- тель, соединенный с ним выходом б.лок правления и согласующий усилитель, вход кото- poi O соединен с динамометром, отличающийся тем, что, с це,1ЬК) поиь1П1епия Э1||фек- тивности защиты от вибрации, он снабжен датчиком взаимного перемещения объектом, аналоговым сумматором, вы.ход которок подключен к блокч нрав,1е1П1я, а один из входов - к COI .lacy юп|,ему ус и.ли те,но, дополнительным согласующим силиге,лем, вк.люченным между датчиком взаимног о перемещения и входом ана, ю1 ово1Ч) сум.матора, а блок уп)ав,ления вьп1о,1нен в виде последовательно соеднненных корректирующего звена и уси.1иге,ля мошносги.
2. иброизолято -) по п. 1, от.т /аницт п м тем, что допо,лните;1Ы11)Н1 упругий элеме1гг вы11О,лнен в виде ци, индрической прчжнны с регулируемым гюджатием.
3.Виброиз(), 1ятор но н. I, отличающийся гем, что неравножестки э,лемепт ),лнен в виде последовате.льно соедипеи- ны.х виброизолятора н метал,лас1 икового э,1емента.
4.Виброизолятор по н. 1, отличающийся тем, что в качестве датчика взаимного пере менгепия иснользоиан или л оковихревоу,
И.ЛИ ИНЛЛКЛ ИВНЫ11.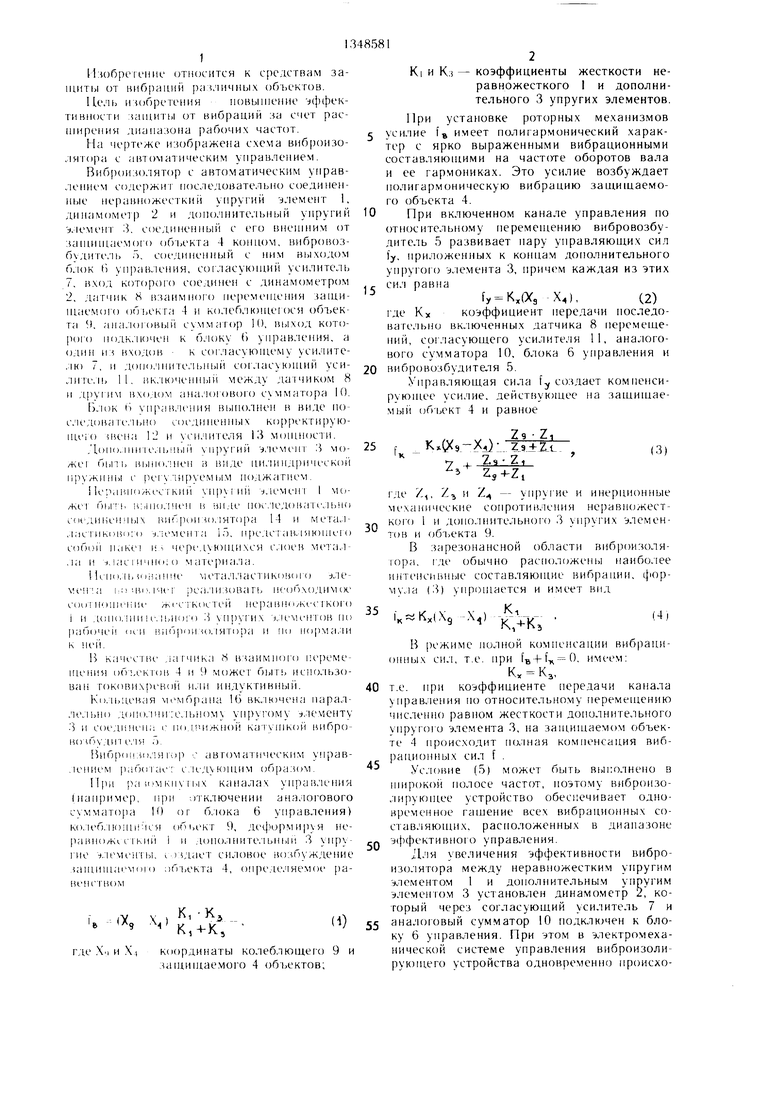
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолирующее устройство с автоматическим управлением | 1988 |
|
SU1716215A1 |
| Виброизолятор с автоматическим управлением | 1986 |
|
SU1370343A1 |
| Виброгасящее устройство с автоматическим управлением | 1986 |
|
SU1406407A1 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| Виброизолирующая опора | 1982 |
|
SU1104324A1 |
| Система управления виброзащитным устройством | 1985 |
|
SU1270755A1 |
| Амортизатор с автоматическим управлением | 1980 |
|
SU1010353A1 |
| Электрическая машина | 1986 |
|
SU1436196A1 |
| Амортизатор с автоматическим управлением | 1984 |
|
SU1229481A2 |
| Устройство для управляемой виброизоляции | 1986 |
|
SU1402736A1 |
И «(Прстспие относится к средствам чашшы 01 вибраций различи1)1 об ьектов. lU .ii и.чоГ)р(чения новьпнеиие ъффектив- носги чаиапы от вибраннй на сч ст расширения диапазона рабочих частот. При работе виброизолятора вибровозбудмтель 5 развивает унравляюн1ую силу, зависящую от ко- :)ффициента передачи последовательно включенных датчика 8, согласук)Н1е1ч) усилителя 11, аналогового сумматора 10, блока 6 унрав- ления и вибровозбудителя 5. Режим io.4Ho(i компенсацни вибра1и1онны.х сил настунает 1ри условии равенства коэффициента передачи кана,1а уцрав,пения жесткости допо.ч- пительного упругого элемента 3. Это условие может быть в1)Н1олнепо в широкой полосе частот. Использовацие динамометра 2 и со- | 1асуюшего усилите.чя 7 иозво.чяет одновременно компенсировать вибрационные си, 1ы и минимизировать ошибку компенсации. Применепие допо,ппительпого ynpyi oro y. ie- KMiTa 3 в виде цилиндрической пружины с регулируемым поджатием уве,1ичивает надежность работы внбровозбудите,1я 5. 3 з.и. ф-лы, 1 ил. 10 сл 00 4 ОО СП 00
