N3
1 СП
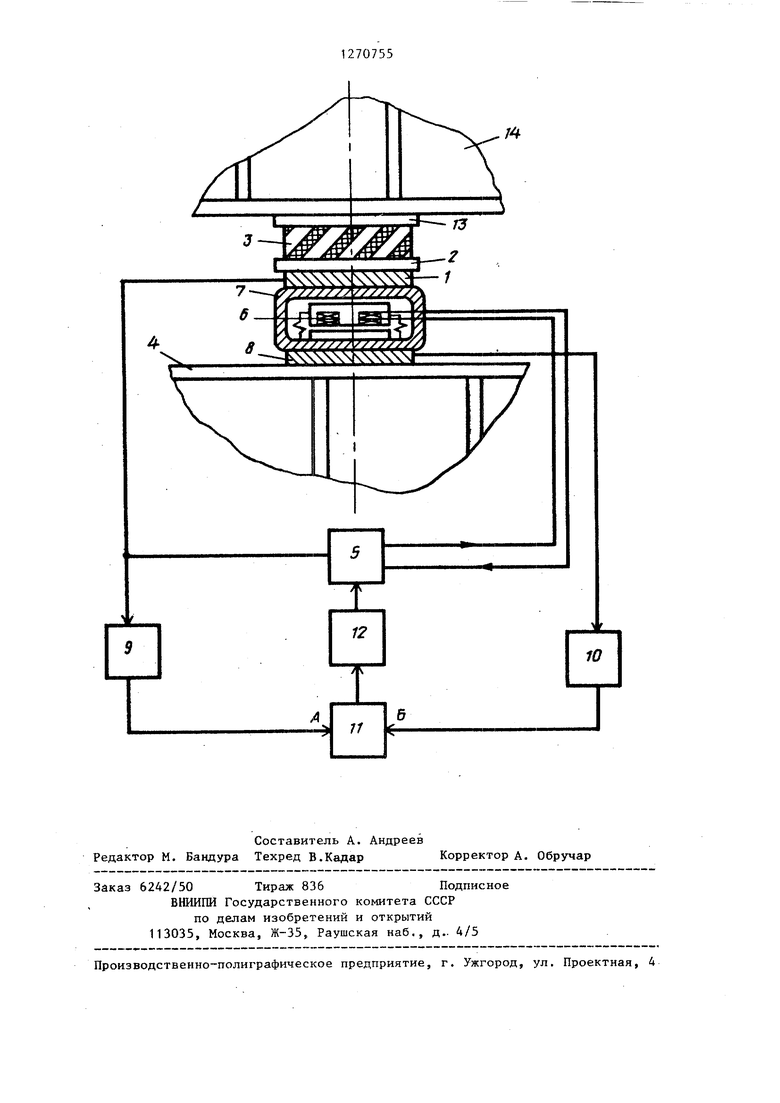
ел Изобретение относится к технике виброэащиты различных объектов, Целью изобретения является повышение эффективности и надежности путем автоматической стабилизации коэффициента усиления канала управления вблизи граничных значений. .На чертеже .изображена схема системы управления виброзащитным устройством. Система управления виброзапщтным устройством содержит электромеханический динамометр 1, скрепляемый с опорным флан1)(ем 2 виброизолятора 3,, обращеиньм к виброзащищаемому объек ту 4, регулируемый блок 5 усил;ения, ччод которого соединен с электромеханическим динамометром 1, а выход - с рабочей обмоткой 6 зибровозбудителя 7, дополйительный электромеханический динамометр 8, устанавливаемый между вибровозбудителем 1 и виброзащищаемым объектом 4, пер вый избирательный усилитель 9, подключенный к электромеханическому динамометру 1, второй избирательный усилитель 10, подключенньй к дополнительному электромехаюэтсескому динамометру 8, компаратор 11, входы которого присое,цинены к выходам избирательных усилителей 9,, 10, и фильтр 12 нижних частот,, вход которого соединен с компаратором 11,, выход - с блоком 5 усиления. Другой фланец 13 аиброизолятора соединен с виброактивным объектом 1 Коэффициенты усиления избиратель ных усилителей 9 и 10 на частоте их настройки выбраны из соотношения К, коэффициенты усиления где К,„ К„ избирательных усилител 9 и 10,стабилизируемый коэффи циент усиления системы управления, Система управления виброзащитным устройством работает следующим образом. При отсутствии схемы стабилизаци коэффициента усиления виброактивный объект 14, деформируя виброизолятор 3, создает упругие силы, которые через электромеханический динамомет 1, корпус вибровозбудителя 7 и дополнительный электромеханический ди 55X намометр 8 воздействуют на виброзащн- щаемый объект 4, возбуждая его ибрацию. Упругие силы деформации виброизолятора 3 измеряются электромеханическим динамометром 1, выходное напряжение которого в блоке 5 усиления преобразуется в управлякящй ток, которьш подается в рабочую обмотку 6 вибровозбудителя 7 и создает в нем усилия, близкие по величине и противоположные по направлению упругим силам. Усилия, развиваемые вибровозбудителем 7, так же как и упругие силы, создаваемые виброактивным объектом 14, приложены к объекту 4, а поскольку их фаза сдвинута на 180, они частично компенсируют возбуждающд1е вибратдию объекта 4 упругие силы, в результате, чего его вибрация уменьшается. Поскольку рассмотренный процесс компенсации упругих возмущающих сил происходит одновременно в некоторой полосе частот, то система управления обеспечивает частичную .компенса1дию всех вибрационных составляющих, расположенных в диапазоне эффективного управления. Однако из-за неустойчивости щиро.кополосной системы управлений компенсация вибрационных сил, переда8ae iыx упругим виброизолятором 3, обеспечивается не полностью. Кроме того, в транспортных условиях виброзащитный эффект будет изменяться во времени, что снижает надежность работы виброзащитного устройства-. При наличии схемы стабилизации коэффициента усиления канала управления системы номинальное (рабочее) значение коэффициента усиления /Кг / может быть выбрано ближе к граничному значению, т.е. близким к 1. Это возможно благодаря устранению дестабилизирующего влияния на работу системы ущэавлекия изменения расочего зазора между сердечником и якорем виброзозбудителя 7 и незначительной скорости изменения вибрационных процессов и поворотных движений объектов J, что позволяет уменьшить запасы устойчивости без ухудшения качества управления. Процесс стабилизации коэффициента усиления канала управления системы происходит сле,цующим образом. Если коэффициент усиления канала управления системы K равен номинальному значению KJ7 (выбранному в „ , , из условия максимальной эффективности виброзащитного устройства и с учетом устойчивости системы управления), а коэффициенты усиления избирательных усилителей К и К выбраны в соответствии с равенством К,/К2 1-нК то на входы компаратора 11 подаются равные по величине напряжения fy jr,K,-(f,-f,)y,K. (О где V,, If коэффициенты передачи электромеханических ди намометров 1 и 8; упр угая, в о змущающая сила и сила, развиваемая вибровозбудителем нескомпенсированное ус лие, действующее на электромеханический ди намометр 8 и виброзащи щаемый объект 4. При этом выходное напряжение ком паратора, пропорциональное разности входных напряжений, равно 0. Управляющее действие схемы стабилизации отсутствует и номинальное значение коэффициента усиления канала управления системы К, сохраняется. обеспечивая виброзащитный эффект В, равный 1/(t-bKf ). Brfy/Cfy f,) При наклоне объекта 4 увеличивается рабочий зазор между взаимодействующими поверхностями сердечника и якоря вибровозбудителя 7. Увеличе ние рабочего зазора приводит к умен шению коэффициента передачи вибровозбудителя и, как следствие, всего канала управления. При этом компенсируницее усилие f уменьшается, а равенство (1) превращается в неравенствоfaV.K.(fi, которое означает, что напряжение на входе Ь компаратора 11 превьш1ает напряжение на входе А . На входе ко паратора 11 при этом появляется пос тоянное напряжение, величина которого пропорциональна разности входных напряжений. Это напряжение после фильтрации и усиления в фильтре 12 нижних частот подается на управляю,щий,вход блока 5 усиления с регулируемым усилением и увеличивает-его коэффициент усиления до тех пор, пока коэффициент усиления канала управления системы (с точностью до динамической ошибки) вновь станет равным К Таким образом, благодаря тому, что электромеханическая система управления снабжена схемой автоматической стабилизации коэффициента усиления канала управления вблизи граничных значений, эффективность и надежность виброзащитного устройства увеличиваются. Формула изобретения Система управления виброзащитньм устройством, содержащая электромеханический динамометр, скрепляемый с опорным фланцем виброизолятора, обращенным к виброзащищаемому объекту, блок усиления, вход которого соединен с электромеханическим динамометром, а выход предназначен для соединения с рабочей обмоткой вибровоэбудителя, отличающаяся тем, что, с целью повьшения эффективности и надежности, блок усиления выполнен регулируемым, система управления снабжена дополнительным электромеханическим динамометром, устанавливаемым между вибровозбудителем и защищаемым объектом, первым избирательным усилителем, подключенным к электромеханическому динамометру, вторым избирательным усилиелем, подключенным к дополнительому электромеханическому динамомету, компаратором, входы которого присоединены к выходам избирательных усилителей, и фильтром нижних частот, вход которого соединен с компаратором, выход с блоком усиления, а коэффициенты усиления избирательных усилителей на частоте их настройки выбраны из соотношения , где К,К - коэффициенты усиления первого и второго избирательных усилителей; стабилизируемый коэффициент усиления системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолирующее устройство с автоматическим управлением | 1988 |
|
SU1716215A1 |
| Регулятор для виброзащитного устройства | 1987 |
|
SU1509841A1 |
| Виброизолирующая опора | 1982 |
|
SU1104324A1 |
| Амортизатор | 1985 |
|
SU1320560A1 |
| Виброизолятор с автоматическим управлением | 1984 |
|
SU1249234A1 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU970008A2 |
| Виброизолятор с автоматическим управлением | 1986 |
|
SU1370343A1 |
| Виброгасящее устройство с автоматическим управлением | 1986 |
|
SU1406407A1 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ | 1995 |
|
RU2115844C1 |
Изобретение относится к технике виброзащиты различных объектов. Цель изобретения - повьшение эффективности и надежности, получаемое за счет автоматической стабилизации коэффициента усиления канала управления вблизи граничных частот. Цель достигается тем, что блок усиления системы управления выполнен регулируемым, система управления снабжена дополнительным электромеханическим динамометром, двумя избирательными усилителями, подключенными к электромеханическим динамометрам, компаратором, вход которого соединен с из,бирательными усилителями, и фильтром нижних частот, вход которого подключен к компаратору, а выход - к блоку усиления. Коэффициенты усиления Кд и Kj избирательных усилителей на частоте их настройки выбраны из соотношения .{ , где Kf - стаби(Л лизируемый коэффициент усиления системы управления. 1 ил.
| АМОРТИЗАТОР С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ | 0 |
|
SU259568A1 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU652392A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
