ел
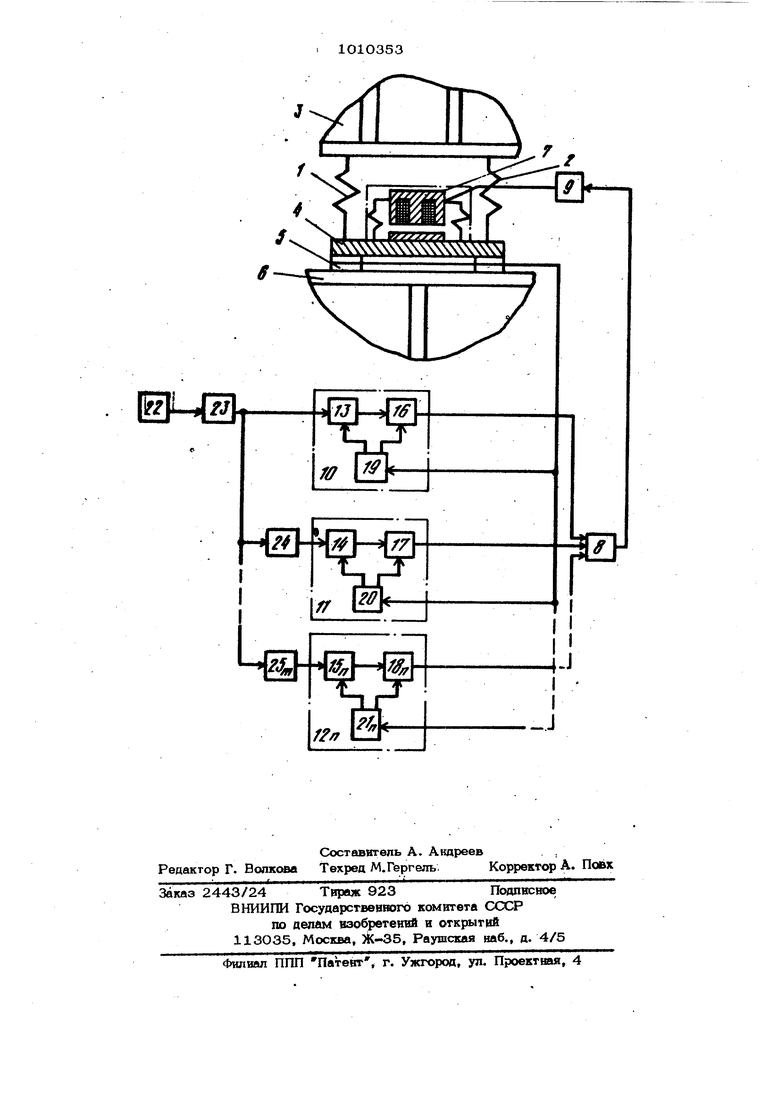
00 Изобретение предназначено для амортйзаики различных объектов в машиностроении. Известен амортизатор, содержащий вибратор и упругие элементы, располагав мые между колеблющимся и виброизолнру емым объектами, электродинамометры и усилитель, вход которого соединен с динамометром, а выход - с вибратором flj Недостаток этого амортизатора определяется самовозбуждением системы виброизоляции. Наиболее близким по технической сущности и достигаем му результату к предлагаемому является амортизатор с автоматическим управлением, содержащий упругие элементы; одни концы которых закрепляются на коле{)лк щемся объекте, проставку, электро1Леханический динамометр, через KOTOp ie другие концы соединяются с изолиругалым объектом, вибровозбудитель, установленный на проставке, последовательно соеди ненные сумматор и усилитель мощности, выход которого подключен к вибровозбудителю, одночас -отные блоки формирования управляющехх сигнала, выход каждого из которых подключен к входу сумматора а управляющие входы соединены с электромеханическим динамометром f 2J. Недостатком известного устройства является малая эффективность амортизации, обусловленная потерей устойчивости электромеханической системы управления на определенных частотах. Целью изобретения является повыщ ние эффективности амортизации. Указанная цель достигается тем, что амортизатор с автоматическим управл&нием снабжен последовательно соединенными датчиком оборотов вала и предварительным усилителем, выход которого подключен к входу одного из блоков формирования управляющего сигнала, и умножителями, входы которых подключены к выходу предварительного усилителя, а выходы - к входам других блоков формирования управляющего сигнала. На чертеже схематично изображен амортизатор с автоматическим управл&нием. Амортизатор с автоматическим утфав лением содержит упругие элементы 1 и 2, одни концы которых закреплены на колеб лющемся объекте 3, проставку 4, электромеханический динамометр 5, через ко торые концы соединенЬ с изолируемым объектом 6, вибровозбудитель 7, становлепный на проставке 4, последо вательно соединенные сумматор. 8 и ус литель 9 мощности, выход которого подключен к вибровозбудителю 7, одночаототные блоки 10,11-12 П. формирования управляющего сигнала. Число блоков формирования управляк щего сигнала определяется количеством подлежащих гащению вибрационных сос тавляющих, каждый из блоков включает . последовательно соединенные амплитудные и фазовые регуляторы 13-16,14-17j 15П-18П, подключенные к входу сумматора 8, и оптимизаторы 19, 20-21h , входы которых соединены с динамометре 5, а выходы - с входами амшрятудных 13,14-15 И/ и фазовых 16,17-18 Л регуляторов. Выход каждого из блоков формирования управляющего сигнала подключен к входу сумматора 8, а управляющие входы соединены с динамометром 5, последовательно сое дине ннъ1е датчик 22 оборотов вала и предварительный усилитель 23, выход которого подключен к входу одного из блоков формирования управляющего сигнала (например, 10), умножители 24, 25W1, входы которых подключены к выходу предварительного усилителя, а выходы - к входам других блоков формирования управляющего сигнала. Амортизатор работает следующим образам. Колеблющийся объект 3, деформируя упругие элементы 1 и 2, создает вибрационное возбуждение изолируемого объекта (например, опорного фундамента). Сиг нал с датчика 22 оборотов колеблющегося объекта 3 (например, роторного механизма) через предварительный усилитель , 23 подается непосредственно на регуля- тор 13 и через умножители 24-25bi на регутхяторы 14 -1 5 и . Параметры датчика 22 оборотов вала, предварительного усилителя 23, умножителей 24-25ш, блоков 10,11-12М формирования, сумматора 8, усилителя 9 мощности и вибровоз удителя 7 выбираются так, что на оборотной частоте (блок 1О формирования) и ее гармониках (блоки 11--12 и формирования) при некоторых (обычно, средних) значениях вибрационных частот составляющие усилия, развиваемого ви&ровозбудителем. 7, равны по величине и противоположны по направлению соответствующим составляющим вибрационного усилия, которое действует на изолируемый объект б со стороны упругих элементов 1 и 2.
При этом все составляющие вибрационного усилия, на которые настраиваютс каналы управления, полностью компенсируются усилиями со стороны вибровозбудителя 7, и возбуждения изолируемого объекта 6 ие происходит.
Для поддержания работы канала управления в режиме наилучшей компенсац вибрационных усилий используются оптимизаторы. 19,20-21и, каждый вз которых имеет два независимых канала экстремального регулирования (амплитуды и фазы управляющего сигнала) Одни каналы служат для управления амплитудными 13,14-15И, другие фазовыми 16,17-18М. регуляторами; Каждый из каналов имеет различную частоту поисковых сигналов, что позволяет производить одновременный (параллельный) поиск необходимых амплитуд и фаз сигналов управления для всех ви&рационных составляющих.
В том стучае, когда подаваилые иа оптимизаторы 19,2O-21h сигшшы имеют в своем составе несколько соотавляющих различных частот, оптимизаторы должны быть избирательными. I На входы амплитудных регуляторов 13,14-15«, с одтого из выходов оптимизаторов 19,2O-21 i подаются кратковременные поисковые сигналы, которые изменяют (например, увеличивают) амплитуды сигналов управления, а следовательно, изменяют компенсирующие силы, развиваемые вибровозбудителем 7. При этом суммарное усилие, действующее на проставку 4 со стороны упругих элементсш 1,2 и вибровозбудителя 7, измеряется динамометром 5 и S сравнивается с этим же суммарным ycилиQv до подачи поискового сигнала. Если после подачи поискового сигнала суммарная сила увеличилась, то поисковые сигналы уменьшают :амплитуду сигналов управления. Если суммарная сила уменьшается, то поисковые сигналы продолжают увеличивать амплитуды сиг валов управленш до тех пор, пока суммарная сила не станет равна минимуму.
5 При этом поисковые сигналы поочередно уменьшают и увеличивают амплитуду сигналов управления, поддерживая суммарную силу вблизи минимума.Каналы регулирования фаз работают аналогично
0 и независимо от каналов регулирования амплитуд.
Благодаря тому, что в амортизаторе сигналы управления от незавйсимого источиика (т.е. не связаны с вибрациями колеблющегося и изолируемого объектов) системна автоматической компенсации вибрациоиш 1х сил работает по разомкнутому циклу и потому устойчива, что повышает эффективность амортизаНИИ.
Применение предлагаемого амортиаатора позволит уменьшить динамические нагрузки, приходящиеся на изолируемый объект, что приведет, в конечном счете, к повышению наденсносги его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Амортизатор с автоматическим управлением | 1978 |
|
SU744168A1 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU771381A2 |
| Амортизатор с автоматическим управлением | 1984 |
|
SU1229481A2 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU652392A2 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU1055924A2 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| Амортизатор с автоматическим управлением | 1976 |
|
SU596763A1 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU1024616A2 |
| Виброизолирующая опора | 1982 |
|
SU1104324A1 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU970008A2 |
АМОРТИЗАТОР С АВТОМАТА ЧЕСКИМ УПРАВЛЕНИЕМ, содержащий упругие элементы, одни концы которых закрепляются на колеблкицемся объекте, проставку, электромеханический динамометр,через которые другие концы соединяютс« с изолируемым объект10М,вибровозбудитель,уста{ювленный на проставке, последовательно соединенные сумматор и усилитель мощности, выход которого ; подключен к вибровозбудителю, одночастотные блоки формирования з равляющего сигнала, выход каждого из которых подключен к входу сумматора, а управляк щие входы соединены с электромеханическим динамометром, отличающийся тем, что, с целью повышения эффективности амортизации, он снабжен последовательно соединенными датчиком оборотов вала и предварительным усилителем, выход которого подключен к входу одного из блоков фор 1црования управляющего сигнала, и умножителями, входы I которых подключены к выходу предвари(Л тельного усилителя, а выходы - к входам других блоков формирования управляющего сигнала.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АМОРТИЗАТОР С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ | 0 |
|
SU259568A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Амортизатор с автоматическим управлением | 1978 |
|
SU744168A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
