Ичппретс-ние nTi nrfrrr.н г; усгтргчйст- вам для стротг гя:у1,(:т11я i ккулгсго ::о-- держа:1ия жгм1-: :-и(одг р( 1Я (Погс пути 53 предн.- Г лчрчгг нсгкли поу ання в
СКС Ге о: ЛПТСП- ЯТНЧССКОГО УП|Э ;ВЛг:Я И5;
машин,змИз осущсс гяляющнн пыпрппку пути в продольном и по гепечн.пм про-Филях: и ,,
{ель ипобретенпя - по1::ьппеяие 1- ас гн выпрянки .
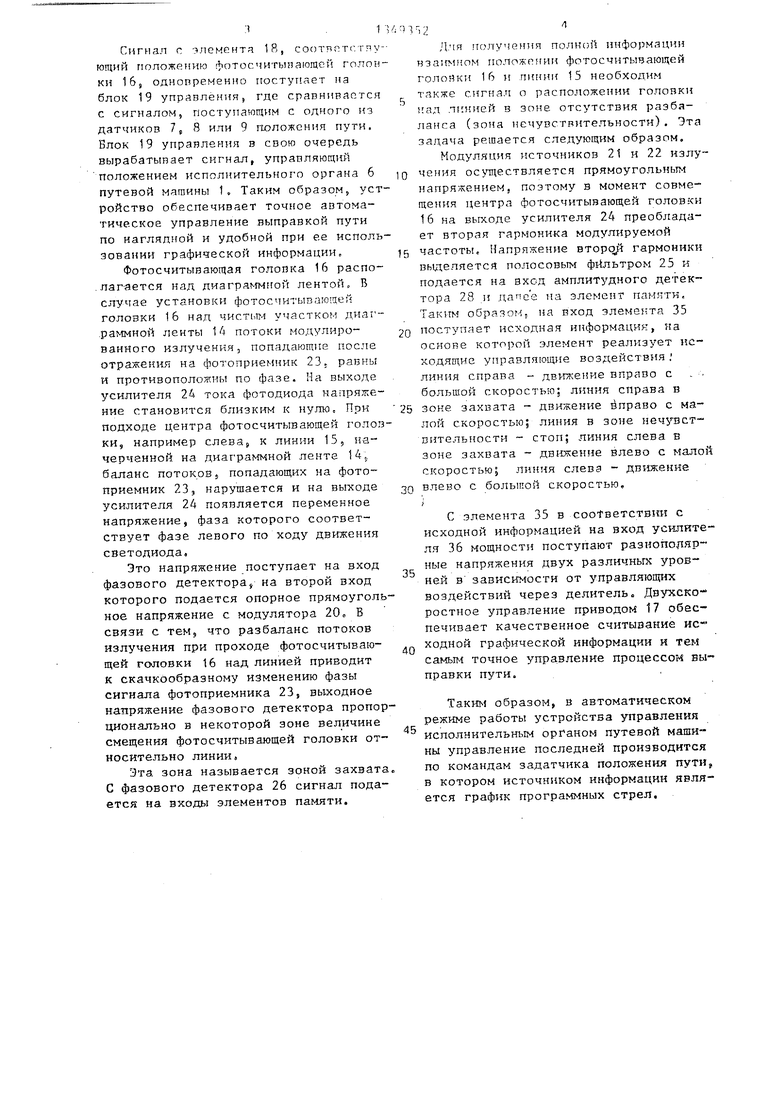
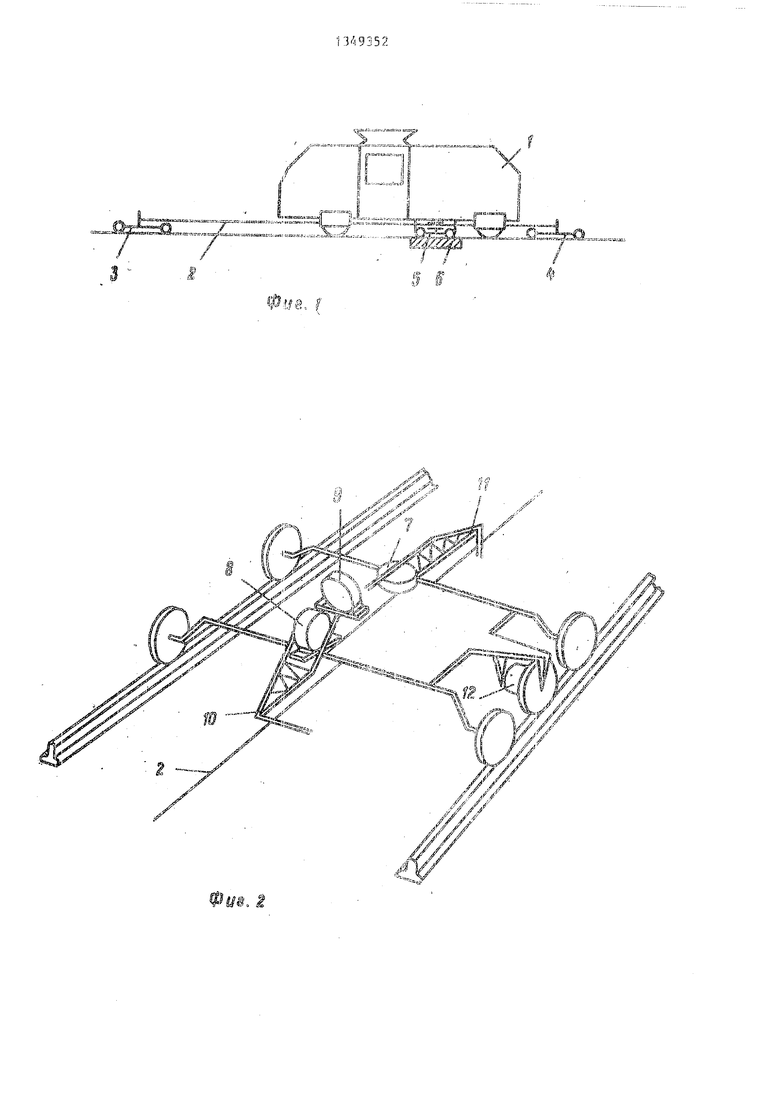
На фиг,, 1 изойрлженя пугк-вяя йа лля пыпргшкк пути; к.ч :риг 2 - средняя нзмери гелымя толп/кка м, с датчиками ноложеиия путк Б плйпк, профиле и jTo i poRHjo;; на фиг, 3 - бЯ ЗГс С:хама снстсм, л-пто - й ическогс упран1|2Н гл П лпрлпкон пути v-jfciHC;
ПЧОДСЛ1Г- г ОЬ Проф1-и; и по уровню; ;ui
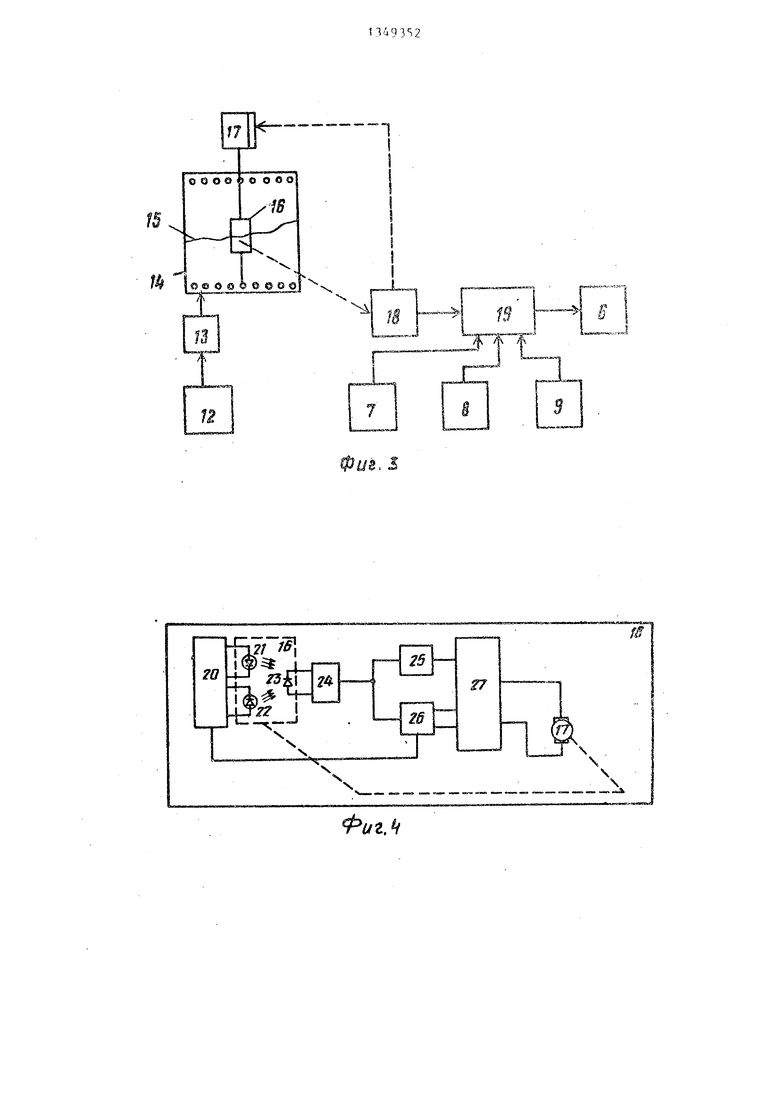
фиг, 4 - блок-схема с:чк 1 ,;я,а о:ре-:::.а п- -- cbmajoffi.ero устройства; и,;з фгпу, Ь - упрявлп;Г:-чЯ нр1- Содом .-;n1г;i;i-я
ycTpoticrno jvin угграв.пепня ксиоп-- пктелькым орг;3пом ь/оитируется (ia г:у- тегзой маиине I для тапрвп кн путп, со,| ержащей измерительную базу 2, мапрг-гмер трос, пере/шиою и надиюю Ч измерительные тележки,; среднгою рителькуш теле;кК5 5 и испо/П 5| ге,г|ьньгй oprabs 6,
На средней нзмерительггой тележкй; pacri(j.,i датчик 7 поло/хения ггу-г-и в плане, датчик 8 положе1г; ;г пути в профиле, датчик 9 положе - : ПУТИ п уровню, связанные с uoMoi t:-iso лцупоз 10 и 11 с ипмерителыюй б,:1,2ой 2, ,-; также датчик 2 пройденного пути..
Система аптоматг-тческог:. yKpaa.,ei-i« выправкой, пути содер кчт дптч к 12 пройденного пути, вход ко орого сгзя- зан с; приводол nepc Meiiiei-iH): диаграг г мой ленть с .пимисй 15. графически задающей требуемое Г1оложе(-;ие , Фотосчить;за10 пая голопка И: pacnojio- жена над ликпей 13 и связана с. пргг- зодом 17 перемсщег. ия ГОЛОЕКН,
. Пололсеннр фотосчитываюпусй головлк 16 о тиоситсльно диаграммой ленть; 14 определяется с гюмогць з.п:с:ме):гга S выход которого связан с блогсом 19 управления исполнн тельньи-Е органом: 6 пз тевой машикы 1., Б.ПОК, 19 управления связан также с вьгходами дг.т -гиков 7-9 положения пути,
Элемент 18 управ.пйат пр Изодом 17 j обеспечивает з,э, и считугаание нк- фюрмацин с диаграммой ленть Nt и состоит из электронного модулятора 20, гфотивофапныс / ыходь которого связан
г: я еодлни источиик /г 21 н 22 Н11Я фотосмп гьтл 01Цей голог ки 16
П качестве источников излучения ггрммсня:отг:г7,. FfaripHMep спетодиоды. Иифрлкрйсное нчлучяние принимается фотоприймником 23 излученияj например фотодиодом,, еое.днненнын через уси.г1итель 24 тока фотодиода с полосовым фильтром 2.i второй гармоники 1 а с т о ть в ы р а б .а тг i F i я е м о и м о д у л .я т о р о м 20, и фя;;о -гуястБите.пьного усилителя 26., к д,.пее с бткгкок 27 управления )Дои Г перйг. фотосчиты- йяющей головки ID,
Яыход полосовС Го филгьтра 25 сое- j fHfiei с nxo/fOK ,ямг;лктуд 1ого детекто )а 29 ; далее фop :i poнaтeль 29 и;5Г1ркт.гср триггер П.1Идта,, с входом лоГП- Г;С:;(С)ГЧ1 CJJr ieKTa 10
гЬ1Аоды г;увст пм ельиого усилителя :6 с;::едиь1еиг 1 с в; одяь5к формирователе 3; п 32,, папримср триггер ГОмкдтй, а пыходь формиров,1телей 31 и 32 соеди- с вкoдa { i элемег1тоБ 33 и ЗА памяти, fianp -tep R5- .- риггероь Выходы формиромата.пйй 31 и 32 соединены со пх:одяг.И лс ГКческого элемен
к 34 памяти соед:тпе;;77 с зходами .погическсго эле- мсмтг 30 и з.:1еиектА 35 выбора, скорое тгй ггеремрп внкя приЕгща фотосчитыва- головки 1Ьг Зь Ход логического элеметгта 30 также соединен со вxoдo г злеис;г1та 35 пыбора скорости переме фотосчит ьгая ощей головки 16 и ;: -зходамя R5 - э.иег- ектов 33 и 34- аняти.
Вьп-:-одьг эламстгг; J5 соединеньг с i niM vrcTpK HbiHt Бхо,г;амр5 усилителя 36 s.ioajHCK-ти далее с Приводом 17
У с: т рой с т II о работает слва.улщШ г браэом,
Hf оснсЕ-е запис:и натурного поло- яения пути иа диаграммной ленте 14 ланосится линия 15j графически З ада- гогйзя требуемое ио.ложение тутк - гра фкк программных стрел„ При перемещении путевой машииь 1 датчик 12 прой- денног о иути дает сигнал ка протяжку диаграммной ленты пропорционально пройденному магаиясй пути например,. Е маса. табе Элемент 18 sfenpe- рьшно управляет приводом t7 перемещения фотосчитывагощей головкк 16 таким образом, что полозление последней соответствует ианесенноьгу графику прог- раммньгх стрел „
Сигнал с элемента 18, соотвптг.тпу ющий положению фотосчитыпающсй голон кн 16, однопременно поступает на блох 19 управления, где сравнивается с сигналом, поступающим с одного из датчиков 7, 8 или 9 положения пути. Блок 19 управления в свою очередь вырабатывает сигнал, управляющий положением исполнительного органа 6 путевой машины 1, Таким образом, устройство обеспечивает точное автоматическое управление выправкой пути по наглядной и удобной при ее использовании графической информации,
Фотосчитываюшая головка 16 распо- .лаг-ается над диаграммной лентой, В случае установки фотосчитываюгаей головки 16 над чистым участком диаг - .раммной ленты 14 потоки модулированного излучения, попадающие после отражения на фотоприемник 23. равнь и противоположны по фазе. На выходе усилителя 24 тока фотодиода напряжение становится близк -тм к нулю. При подходе центра фотосчитывающей головки, например слевзе линии 15, Ш- черченной на диаграммной ленте 14,, баланс потоков, попадающих на фотоприемник 23, нарушается и на выходе усилителя 24 появляется переменное напряжение, фаза которого соответствует фазе левого по ходу движения светодиода.
Это напряжение поступает на вход фазового детектора, на второй вход которого подается опорное прямоугольное напряжение с модулятора 20,, В связи с тем, что разбаланс потоков излучения при проходе фотосчитывающей головки 16 над линией приводит к скачкообразному изменению фазы сигнала фотоприемника 23, выходное напряжение фазового детектора пропорционально в некоторой зоне величине смещения фотосчитывающей головки относительно линии 1
Эта зона называется зоной захвата С фазового детектора 26 сигнал подается на входы элементов памяти.
5
0
5
0
5
0
5
Д.чя получения полной информации взаимном положении фотосчитывающей голойки 16 и пигши 15 необходим также сигнал о расположении головки над линией в зоне отсутствия разбаланса (зона нечувствительности). Эта задача решается следующим образом.
Модуляция источников 21 и 22 излучения осуществляется прямоугольньтм напряжением, позтому в момент совмещения центра фотосчитывающей головки 16 на выходе усилителя 24 преобладает вторая гармоника модулируемой частоты. Напряжение вторфЧ гармоники выделяется полосовым фильтром 25 и подается на вход амплитудного детектора 28 ,и дапс е на элемент памяти, образог-. на вход элеме ;та 35 поступает исходная информация, на основе которой элемент реализует исходящие управляющие воздействия, линия справа - движе1 ие вправо с . . большой скоростью; линия справа в зоне захвата движение вправо с малой скоростью; линия в зоне неч тзст- питель ости - стоп; линия слева в зоне захвата двгскение влево с малой скоростью; линия слева - движение влево с большой скоростью,
С элемента 35 в cootaeTCTBroi с исходной информацией на вход усилителя 36 мощности поступают разнополяр- ные напряжения двух различных уровней в зависимости от управляющих воздействий через делитель. Двухско- ростное управление приводом 17 обеспечивает качественное считывание ис ходной графической информации и тем самым точное управление процессом выправки пути.
Таким образом, в автоматическом режиме работы устройства управления исполнительным органом путевой машины управление последней производится по командам задатчика положения пути, в котором источником информации является график программных стрел.
b-.r-v; ,..
-.-; irii.3fMc.,
f f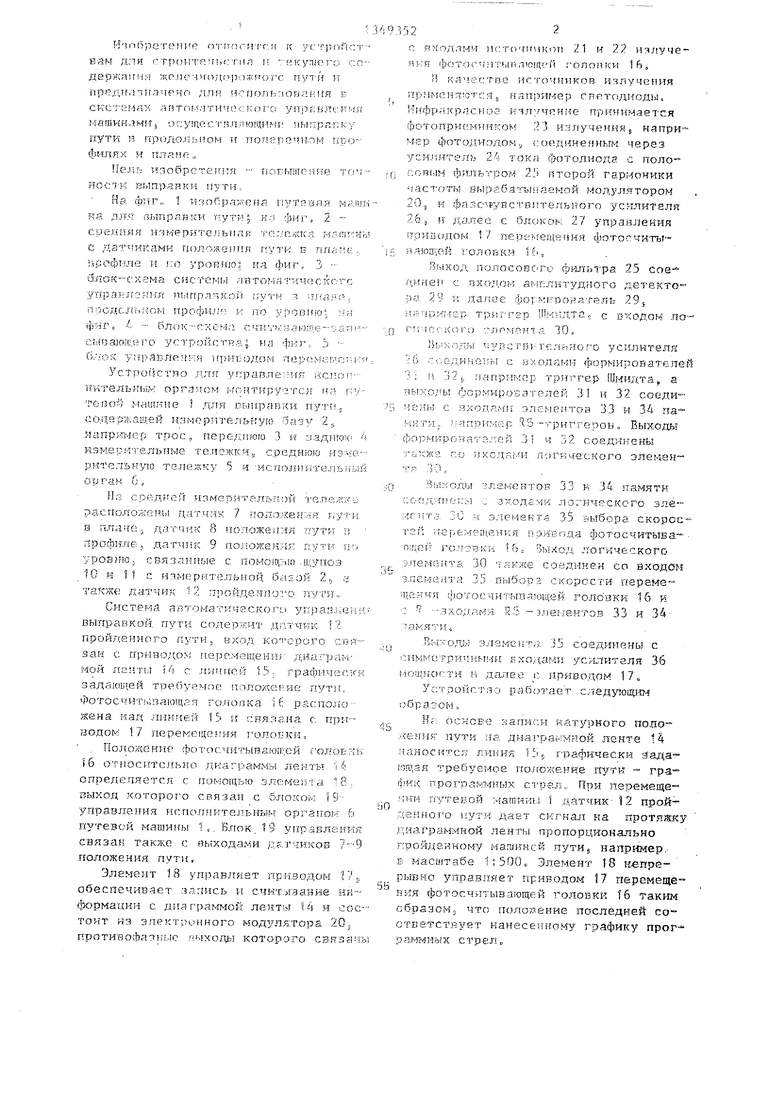
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диспетчерского управления автотранспортом | 1983 |
|
SU1218412A1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Магнитографический дефектоскоп | 1987 |
|
SU1469437A1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ФОРМЫ КРИВОЙ | 1969 |
|
SU238247A1 |
| Способ выправки пути в продольном профиле и плане и устройство для его осуществления | 1976 |
|
SU667623A1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2414004C1 |
| Фотокопировальная система управле-Ния | 1978 |
|
SU813368A1 |

ч
ч
Фиг.Ц
Фи& S
