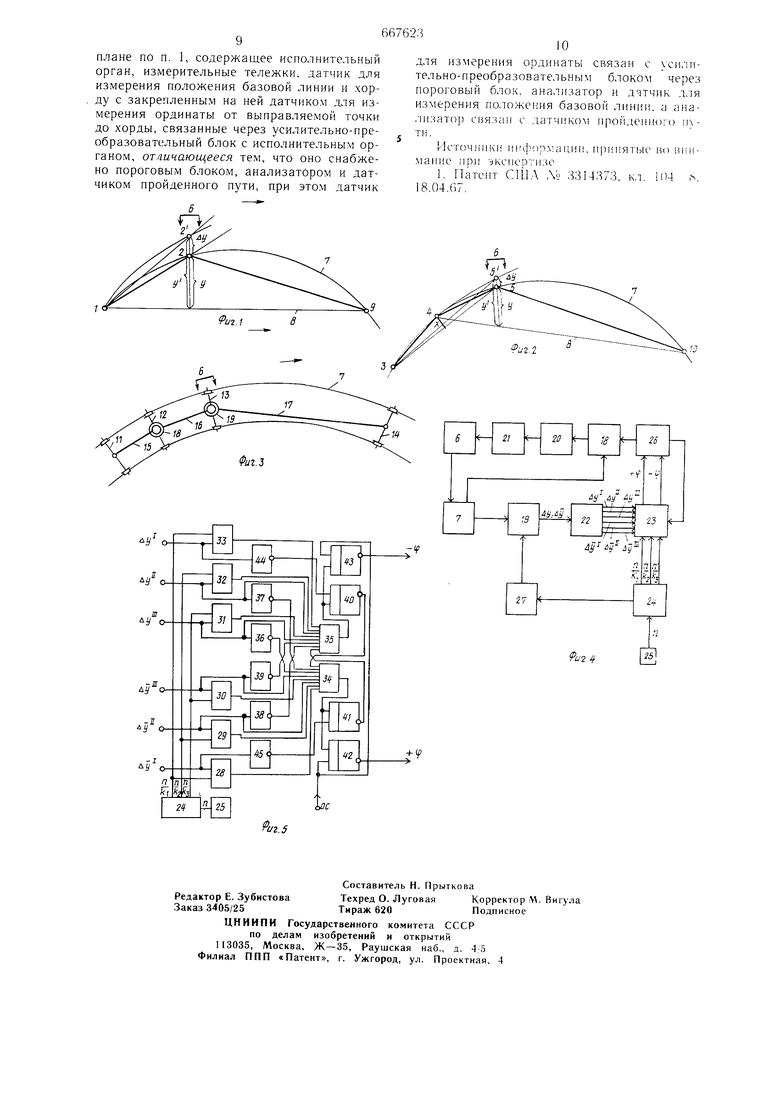
(54) СПОСОБ ВЫПРАВКИ ПУТИ В ПРОДОЛЬНОМ ПРОФИЛЕ И ПЛАНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ вручную вводить требуемые изменения в первоначальную настройку системы. Существующий способ выправки по методу сглаживания не позволяет получить требуемую плавность выправленного пути при работе на капитальном и среднем ремонтах пути, так как работа устройства автоматической выправки пути, реализующего этот способ, осуществляется но HcnimetinoMy жесткому алгоритму, а именно: встречающиеся неровности уменьн1аются до 1/т их первоначальной величины (т -- коэффппнент сглаживания). Цель изобретения - повышение плавности выправленного пути. Для достижения этой цели в точке выправки задают значение ординаты, определяемое проектом, относительно хорды и пороговые величины отклонения от проекта,перемещают рельсовый путь до совмещения с базовой линией и затем корректируют первоначальное положение базовой линии в зависимости от величины и знака результата сравнения разности значения ординаты от точки выправки то хорды и заданной ординаты с пороговыми величинами и длины пути, пройденного мащиной. Известно устройство для осуществления способа выправки пути в продольном профиле и плане, содержан ее исполнительный орган, измерительные тележки, датчик для измерения положения базовой линии и хорду с закрепленным на ней датчиком для измерения ординаты от выправляемой точки до хорды, связанные через усилительно-преобразовательный блок с исполнительным органом 1 . Устройство не позволяет получить требуемую плавность выправленного пути при работе выправочной мащины на капитальном и среднем ремонтах пути, так как оно предназначено для реализации известных способов сглаживания встречающихся неровностей железнодорожного пути. Для достижения цели изобретения устройство снабжено пороговым блоком, анализатором и датчиком пройденного пути, при этом датчик для измерения ординаты связан с усилительно-преобразовательным блоком через пороговый блок, анализатор и датчик для измерения положения базовой лиНИИ, а анализатор связан с датчиком пройденного пути. На фиг. 1 изображена принципиальная схема расположения измерительнвзгх точек с базовой линией, определяемой двумя точками; на фиг. 2 - принцициальная схема расположения измерительных точек с базовой линией, определяемой тремя точками; на фиг. 3 - принципиальная схема расположения измерительных тележек; на фиг. 4 - блок-схема устройства, реализующего способ; на фиг. 5 - блок-схема анализатора. Для реализации способа выправки пути, например в продольном профиле, на участке рельсового пути располагают базовую линию, которая определяется, по крайней мере, ;1вуми точками 1 и 2 и.;1п тремя точками 3, 4 и 5, причем вблизи точки 2 или 5 пути располагается исполнительный механизм 6 путевой машины. При отклонении точек 2 или 5 от базовой линии в положения. 2 или 5 рельсовый путь 7 неремен;ается исполнительным механиз.мом 6 до установления т(,чки 2 или 5 на базовую линию. Теоретически такой способ выправки обладает сглаживаюпщмн свойствами, независимо от исходных неровностей пути, так как исполнительный механизм 6 располагается вблизн передней точки 2 или 5 выправочной системы. Однако реально сун1ествуюн1ие системы имеют огнибки, которые при таком способе выправки пути могут накапливаться и привести к уводу железнодорожного пути. Для ограничения возможного накапливания ошибки одновременно располагают хорду 8, определяемую точками 1, 9 или 4, 10 и измеряют ординату Y, онределяю цую расстояние от хорды 8 до точки 2 или 5, принадлежащей базовой ЛИ1П1И. Если за счет возможных уводов пути, выпра1 лярмяя точка 2 или 5 сместится в положение 2 или о , то изменяется значение измеряемой ординаты Y на Y. В связи с этим измеряют ординату Y, определяющую расстоя1ше от точки 2 или 5, до хорды 8, сравнивают ее с заданной ординатой У и получе1П1ую разность их Л У сравнивают с заранее заданными пороговыми величинами. TeopCTHnecKiie исследования показали, что требуемая плавпость выправленного пути может быть получена при трех ф иксированцых пороговых величинах (А Y-, ДУ-, А ), где Д У - первая пороговая величина; Д у - вторая поро|-овая величина; Д У - третья пороговая величина. В том случае, еслн разность ДУ ординаты у и заданного ее значения У не достиг-„ ла первой порО1Овой величины, т. е. Д У А У ннкакмх корректирогюк не производится. Если ве.чичина А У находится в зоне между первой и второй по роговыми величинами, т.е. С А У или между второй и третьей порог(1рыми величинами, т. е. или болыне третьей пороговой величины, т.е. , то соответственно через каждые, например шесть или четыре, ил)1 два метра пути, пройденного мащиной, периодически корректируют положение точки 2 или 5, принадлежащей базовой линии на фиксированную величину, равную например, одному миллиметру перемеще п-1Я исполнительного механизма 6, причем направление корректировки противоположно знаку А У. При переходе величины из второй зоны в третью, т. е. из зоны AY А У Д У в зону или из третьей в четвертую.т. е. из зоны Д У А Y Л Yi в зону Д Y АУ, однократно корректируют положение точки 2 или 5, принадлежащей базовой линии, на фиксированную величину ту же, что и ранее, или иную, причем направление корректировки противоположно знаку Д У. При переходе величины Д Y из четвертой зоны в третью, т. е. из зоны Д Y Д Y в зону Д Y- Д Y Д Y , или„ из третьей зоны во вторую, т. е. из зоны Д Y- Д Y Д Y в зону Д Y- Д Y Д Y-, второй зо пы в первую, т. е, из зоны Д Y Д Y Д Y - в зону Д Y- Д Y, однократно корректируют ноложение точки 2 или 5, принадлежаН1ей базовой линии, на фиксированную величину, причем направление корректировки совпадает со знаком Д Y. Теоретические исследования предлагаемого способа выправки железнодорожного пути показали, что постановка пути на отметки, близкие к проектным, обеспечивается с требуемой точностью и степенью плавности независимо от исходного состояния пути, т.е. такой способ выправки можно применять на различных видах ремонта пути, в том числе и капитальном. Устройство для осуществления способа выправки пути, например в продольном профиле, содержит измерительные тележки 11, 12, 13, 14, располагаемые в выще указанных точках железнодорожного пути и соединенные .между собой хорда.ми 15, 16. 17. Угол, образуемый хордами 15, 16, пропорциональный ординате X, измеряется датчиком угловых перемещений 18, расположенным на измерительной тележке в точке 4, а угол, образуемый хордами 16, 17, пропорциональный ординате У, измеряется датчиком угловых перемещений 19, расположенным на измерительной тележке в точке 5. В качестве измерительно-преобразовательных элементов в датчиках угловых перемещений 18, 19 могут быть использованы потенциометрические датчики, в которых выходное напряжение пропорционально измеряемому углу, образуемому хордами 15, 16 или 16, 17. Датчик угловых перемещений 18 соединен с электронным усилителем 20, управляющим подъемом (опусканием) рельсового пути 7 посредством привода подъемного органи 21 исполнительного механизма 6. Устройство содержит пороговый блок 22, вход которого связан с датчиком угловых перемещений 19, а выход - с анализатором 23, который одновременно связан через делитель электрических импульсов 24 с датчиком пути 25, а выход анализатора 23 через блок корректировки 26 соединен с датчиком угловых перемещений 18. Для задания и изменения программы (ординаты У) работы устройства для выправки железнодорожного пути, например, в продольном профиле для изменения подъемки пути в процессе работы мащины, осуществления отвода в начале и в конце фронта работ, а также перед различными препятствиями (мост, тоннель и т. д.) предусмотрен блок задания программы 27, вход которого связан с делителем электрических импульсов 24, а выход - с датчиком угловых перемещений 19. В качестве порогового блока 22 может быть использован знакочувствительный аналого-цифровой преобразователь. Пороговый блок 22 служит для преобразования величины ДУ как положительного, гак и отрицательного знака в трехразрядный двоичный код с учетом знака, т. е. ДY- AYi, ДY« и ДУ ДУ«:, ДУЙ. Анализатор 23 представляет собой устройство, выполняющее ряд логических операций для реализации предлагаемого способа выправки железнодорожного пути. Датчик пути 25 связан с делителем электрическкх импульсов 24, выходы которого связаны с одним из входов элементов 28-33, реализующих логическую функцию - коньюнкцию (И), причем другие их входы связаны с выходами, соответствующими nqporoBbjjyi величинам Д , Д уЭ , Д У; Д у1, Д у1, Д УЙ порогового блока 22. Три входа восьми входовых элементов 34, 35, реализующих логическую функцию - дизъюнкцию (ИЛИ), связаны соответственно с выходами элементов 28, 29, 30 и 31, 32, 33, два входа соединены соответственно с cooTBejствурщими величинам АУ-, Д У- и Д , Д У - порогового блока 22, два других входа связаны соответственно с выходами элементов 36, 37 и 38, 39, реализующими логическую функцию - инверсию (НЕ), и один вход соединен соответственно с выходом элементов 40, 41 с двумя устойчивыми состояниями, например триггеров. Выходы элементов 34, 35 соответственно связаны с триггерами 41, 42 и 40, 43, а выходы триггеров 42, 43 соединены со входом блока корректировки 26, причем выход последнего связан с датчиком угловых перемещений 18 и одновременно с анализатором 23, обеспечивая тем самым обратную связь при подаче корректирующих сигналов + ф, фиксированной величины от анализатора 23. Во время движения измерительных тележек 11, 12, 13, 14, расположенных первоначально в точках 3, 4, 5, 10 совместно с путевой мащиной при отклонении точки 5 от базовой линии, определяемой взаимным положением этих точек, на выходе датчика угловых перемещений 18 возникает напряжение определенной величины того или иного знака рассогласования и посредством электронного усилителя 20 и привода подъемного органа 21 подается соответствующая команда на перемещение рельсового пути 7 исполнительным механизмом 6 в ту или иную сторону в зависимости от знака рассогласования.
За время движения машины от датчика пути 25 иериодически, например через 0,5 метра пройденного пути, с частотой «п поступают импульсы на вход делителя 24, с выхода которого снимаются также импульсы, но уже с частотой --; г-; . В том
KI 2 Ь
случае, если в процессе выправки железнодорожного пути значение AY достигло порога срабатывания первого порога, т.е. на одном из входов,соответствую1дих величинам Д Y или Л Y анализатора 23 имеется сигнал и одновременно присутствует сигнал на входах элементов 33 и 28, то на выходе элемента, соответственно 33 или 28, появляется сигнал, который пройдя через элемент 35 или 34, вызывает переброс триггера 43 ИоТи 42 из одного устойчивого состояния в другое, что приводит к появлению соответствующей команды - -If или + f на входе блока корректировки 26, на выходе которого появляется сигнал, изменяющий первоначальную настройку датчика угловых перемещений 18, т.е. меняется первоначальное положение базовой линии, что в итоге приводит к перемеш.ению рельсового пути 7 на величину корректировки ф вниз или вверх.
Если величина Дф достигла порога срабатывания второго или третьего порогов того или иного знака, т. е. на входах, соотв етстд црн;их величинам А Y-, Д Уй или ДУ, Д У элементов 35 или 34 появляется сигнал, происходит переброс триггера 43 или 42 из одного устойчивого состояния в другое, что приводит к появлению соответствующей командыф или + р на входе блока корректировки 26, а это, в свою очередь, к перемещению рельсового пути 7 на величину корректировки ср вниз или вверх.
Если при дальнейшем движении машины величина Л ср остается больше величины второй или третьей пороговых величин, т.е. на одном из входов элементов 32 или 31 присутствует сигнал и одновременно приходит сигнал с выхода или - делителя 24, на выходе элементов 32 или 31 появляется сигнал, который нройдя через элемент 35, перебрасывает триггер 43, приводя при этом к появлению команды - «р на входе блока корректировки 26, что в итоге приводит к перемеи 1,ению рельсового пути 7 вниз на величину корректировки f. При отрицательном значении измеряемой величины Д У происходят аналогичные процессы, но вместо элементов 32, 31, 35 и триггера 43 используются соответственно элементы 29, 30, 34 и триггер 42 и при этом осуществляется перемещение рельсового пути 7 вверх.
В тот момент, когда величина ДУ становится меньше третьей, второй или первой пороговых величин, исчезает соот,ветственно на входе ДУ, Д У или ДУ элементов 36, 37 или 44, что приводит к появлению сигналов на выходе этих же элементов, а это, в свою очередь, к перебросу триггеров 42 или 40 из одного устойчивого состояния в другое, а вследствие этого к появлению команды + «f на входе блока корректировки 26, что в итоге приводит к перемен1.ению рельсового пути 7 вверх на величину корректировки ip. При отрицательном значении величины ДУ происходят такие же процессы, но вместо элементов 36, 37, 44, триггеров 42, 40 используются соответственно элементы 39, 38, 45 и триггеры 43
0 и 41 и при этом осуществляется перемещение рельсового пути 7 вниз.
Для изменения программы работы устройства автоматической выправки пути, например в продольном профиле, в процессе работы машины с помощью блока 27 изменяется первоначальная настройка датчика угловых перемещений 19, т.е. пространственно смещаются зоны, определенные г1эаницами noporoBhix величин Д У- и Д У-; Д Уи Д Д У и Л У, при этом предлагаемый
0 снособ выправки железнодорожного пути позволяет с требуемой степенью плавности автоматически выйти на заданные отметки, лежащие внутри границ уставок независимо от исходного состояния пути.
5 „
Способ выправки пути и устройство для
его осуществления позволяют автоматизировать процесс установки пути на отметки, близкие к проектным, с требуемой степенью плавности за один проход путевой машины независимо от исходного состояния пути.
Формула изобретения
1.Способ выправки пути в продольном профиле и плане с использованием измерительных тележек и хорды, заключающийся в том, что задают базовую линию, определяемую тремя точками, расположенными на выправленном пути, и размещают хорду таКИМ образом, чтобы одна из точек ее располагалась на базовой линии, а другая - на невыправленном пути, определяют и фиксируют ординату от середины прямой, соединяющей крайние точки базовой линии до нее, и ординату от точки выправки до хорды, отличающийся тем, что, с целью повышения плавности выправленного пути, в точке выправки задают значение ординаты, определяемое проектом, относительно хорды и пороговые величины отклонения от проекта, перемещают рельсовый путь до совмещения с базовой линией и затем корректируют первоначальное положение базовой линии в зависимости от величины и знака результата сравнения разности значения ординаты от точки выправки до хорды и заданной ординаты с по{)оговыми величинами и длины пути, пройденного машиной.
2.Устройство для осуществления способа выправки пути в продольном профиле и
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ТУРОВСКОГО РИХТОВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПО ЗАДАННЫМ СДВИГАМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2147639C1 |
| Устройство управления механизмом выправки путевой машины | 1978 |
|
SU773177A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 2019 |
|
RU2757104C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Способ выправки железнодорожного пути | 1977 |
|
SU630333A1 |
| Способ выправки железнодорожного пути и машина для его реализации | 1974 |
|
SU865137A3 |
| Способ выправки железнодорожного пути в продольном профиле и плане | 1976 |
|
SU595448A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
