Изобретение относится к электротехнике, а именно к частотно-управяемым электроприводам, построенным на основе асинхронных двигателей, и может быть использовано в системах общепромышленного назначения с высоими энергетическими требованиями.
Целью изобретения является снижение энергетических затрат за. счет оптимизации режима работы асинхронного двигателя.
На фиг.1 представлена функциональная схема частотно-регулируемого электропривода; на фиг.2 - схема блока вычисления корректирующего управляющего напряжения.
Частотно-регулируемый электроприод содержит асинхронный двигатель I | фиг.} , подключенньш к выходам преобразователя 2 частоты, выполненного из последовательно соединенных управляемого силового выпрямителя 3 и инвертора 4, блок 5 управления вьшрямителем с подключенным к его входу регулятором 6 напряжения, блок 7 управления инвертором с подключен- , ным к его входу блоком 8 задания астоты вращени5г, блок 9 выеления ЭДС, подключенный входами к вьгходам датчиков 1 О фазных токов и датчиков 11 фазных напряжений, первый сумматор 12, подключен- ньй первь1м входом к выходу блока 9 выделения ЭДС, а выходом - к входу регулятора 6 напряжения, и блок 13 управления режимами работы.
В частотно-регулируемьй электропривод введены второй 14 и третий 15 сумматоры, блок 16 управляемых ключей с коммутируемым и управляю- щим входами, управляемый маломощный выпрямитель 17, блок 18 синхронизации, корректирующий регулятор 19 с основным входом и входом переключения и блок 20 вычисления корректирующего управляющего напряжения с двумя группами входов, а блок I3 управления режимами работы выполнен в виде формирователя тактирующих импульсов и снабжен входом синхронизации и шестью выходами. При этом первая группа входов блока 20 вычисления корректирующего управляющего напряжения подключена к соответствующим выходам датчиков О фазных токов и датчиков 11 фазных напряжений, вторая группа входов подключена к соответствующим первым четьфем выходам
блока 13 управления режимами работы, а выход блока 20 вычисления корректирующего управляющего напряжения подключен к первому входу второго сумматора 14, соединенного выходом с входом корректирующего регулятора 19, выход которого подкхлочен к управляющему входу управляемого маломощного
выпрямителя 17, подключенного выходом к коммутируемому входу блока 16 управляемых ключей, выход которого подключен к второму входу второго сумматора 14 и к первому входу третьего сумматора 15, подключенного входом к выходу блока 8 задания частоты вращения, а выходом - к второму входу первого сумматора 14.
Пятый и шестой выходы блока 13
управления режимами работы подключены соответственно к управляющему входу переключения корректирующего регулятора 19. Вход синхронизации блока 13 управления режимами работы
соединен с выходом блока 18 синхронизации, подключенного входами к выходам датчиков 10 фазных токов и дат чиков 11 фазных напряжений.
Блок 20 вычисления корректирующего управляющего напряжения содержит блок 21 вычисления тока (фиг.2), блок 22 вычисления напряжения, блок 23 вычисления фазового сдвига,блоки 24-- 28 запоминания,блоки 29 и 30 вычитания,
преобразователь 31 функции тангенса, умножители 32 и 22, делитель 34 и с сумматор 35. Входы блока 2 вычисления тока и блока 22 вычисления напря-. женйя образуют первую группу входов
блока 20 вычисления корректирующего управляющего напряжения. Входы блока 23 вычисления фазового сдвига подключены соотве гственно к входам блоков 21 и 22. Блоки 24 и 25 запоминания подключены входами к выходам блока 21 вычисления тока, а выходами - к блоку 29 вычитания. Блок 26 запоминания подключен входом к выходу блока 22 вычисления напряженияj а
выходом - к первому входу умножителя 33. Блоки 27 и 28 запоминания подключены входами к выходам блока 23 вычисления фазового сдвига, а выходами - к блоку 30 вь1читания. Один из
выходов блока 23 вычисления фазового сдвига подключен также к входу преобразователя 31 функции тангенса, выход которого соединен с одним из входов умножителя 32,, другой вход
31
которого подключен к выходу блока 30 вычитания. Выходы блока 29 вычитания и блока 24 запоминания подключены к соответствующим входам делителя 34, выход которого и выход . умножителя 32 подключены к входам сумматора 35, соединенного вькодом с вторым входом умножителя 33. Выход последнего образует выход бло- ка 20 вычисления корректирующего управляющего напряжения, вторая группа входов которого образована соот- ветственно объединенными между собой вторыми входами блоков 21-23 запо- минания, объединенными между собой вторыми входами блоков 24 и 26 запоминания и преобразователя 31 функции тангенса, объединенными между собой вторыми входами блоков 25 и 28 запоминания, а также входами на разрешение работы блоков 29 и 30
вычитания, делителя 34, умножителей 32 и 33 и сумматора 35.
В качестве .корректирующего регу- лятора может быть использован пропорционально-интегральный регулятор (пи-регулятор), подключаемый в схему или шунтируемый накоротко по входу переключения.
В качестве блока 18 синхронизации используется стандартньй блок с формированием синхроимпульсов, кратных периоду фазного тока или напряжения .
Блок 13 управления режимами работ определяет последовательность работы других блоков электропривода и выполняется с использованием генератора стабильной частоты и кольцевого счетчика, емкость которого определяется количеством тактирующих импульсов за один цикл работы системы.
Работа электропривода основана на следующем.
Из управления баланса средней за период мощности переменного тока, подводимой к статору двигателя, получают
(и.|,) i-u-krcf--
гдео (U,l,q) - функция в относительных единицах, характеризующая переда- чу мощности переменного тока через воз- дущный зазор в ротор двигателя;
и, I - фазные напряжения и
ток;
(f - фазовьш сдвиг между напряжением и током;
R - активное сопротивление статора.
Находят приращения функции ci(U,l,q) при малых изменениях напря жения. В этом случае приращение функции можно заменить приращением ее дифференциала:
Лоб(и,1 ,д) й|
и costp
ли и
- -у- - tgtf-Acp.
В режиме, обеспечивающем максимум передачи электромагнитной мощности в ротор двигателя, вьшолняет- ся соотношение:
il
- --Г- .- tgCf-ucp ) 0.
(3)
Из (3) определяют требуемое приращение напряжения, обеспечивающее оптимальный режим:
М У 1 Ч 5 Ё S i - АЧ.
ди, и(
AU
tgCf utf).
(4)
Частотно-регулируемьш электропри- вод работает следующим образом.
Сигнал задания U с выхода блока В определяет частоту и велрнину напряжений, питающих статор двигателя 1. Активное сопротивление обмоток двигателя может меняться в широких пределах, поэтому для поддержания оптимального режима по пере- даче электромагнитной мощности в ротор двигателя в электропривод введен дополнительный контур регулирования.
По сигналу Пуск, поступающему на вход блока 13 управления режимами работы, и по сигналу синхронизации с блока 18 в блок 20 вычисления корректирующего управляющего напряжения по каналу I (фиг.2) поступает команда, -по которой с помощью блоков 21 - 23 определяются ток I, напряжение и и фазовый сдвиг (f , на интервале времени, равном или кратном периоду частоты, питающий двигатель.
Синхронизация может быть привязана к. току или напряжению, что определяется удоб ством и точностью определения перехода соответствующей функции через нуль. По окончании вре- мени определения указанных параметров подается вторая команда по ка- налу II, по которой измеренные значения тока, напряжения и фазового сдвига переносятся в блоки 24, 26 и 27 запоминания и в преобразователь 31 функции тангенса, на. выходе которого имеется tg Cf ,
Одновременно в блок управляемых ключей по управляющему входу подается команда и напряжение U,, с выхода маломощного вьтрямителя 17 посту - пает на входы сумматоров 14 и 25, Блок 5 управления вьшрямителем формирует новое задание, и напряжение на выходе управляемого выпрямителя 3 изменяется что приводит к изменению тока и фазового сдвига питающего двигатель напряжения.
Блок 21 вычисления тока на следующем интервале времени определяет новое значение тока, а блок 23 - новое значение фазового сдвига.
По команде с блока 13 управления режимами работы,поступающей по кана- лу III блока 20 вычисления, измеренные новые значения тока и фазового сдвига переносятся в блоки 25 и 28 запоминания,
В следующий интервал времени поступает .серия команд по кангалу II, по которым включаются вычитатели 29 и 30,-умножители 32 и 33, делитель 34 я сумматор 35 и осуществляется вычисление корректирующего напряжения uU, по формуле (4) , После исполнения команды по каналу IV блок 13 управления режимами работы вьщает команду на вход переключения корректирующего регулятора 19, и он рас- шунтируется.
На вход регулятора 19 поступает разность напряжений и„ и По выходному сигнал у регулятора 1 9 осуществляется фазовое управление выпрямителем 17 и напряжение U приводится в соответствие с ли благодаря действию обратной связи,, Воздействуя на блок 5 управления выпрямителем через регулятор 6 напряжения, напряжение и„ определяет выход электропривода на оптимальный режим с передачей электромагнитной мощности в ротор двигателя с минимальными потерями.
Аналогичная работа внутреннего
экстремального контура (сумматор
14, регулйтор 19, выпрямитель 17 и
блок 16 управления ключей) осуществляется и при изменении нагрузки.
Таким образом, введение в частотно-регулируемый электропривод двух сумматоров, блока управляемых ключей, управляемого маломощного вьшря- мителя, блока синхронизации, корректирующего регулятора и блока вычисления корректирующего управляющего напряжения обеспечивают оптимальный режим работы с минимальными потерями передаваемой в ротор двигателя мощности, благодаря чему снижаются
энергетические затраты.
Формула изобретения
Частотно-регулируемьй электропривод, содержащий асинхронный двигатель , подключенньй к выходам преобразователя частоты, выполненного из последовательно соединенных управляемого силового выпрямителя и инвертора, блок управления выпрямителем с подключенным к его входу регулятором напряжения, блок управления инвертором с подключенным к его входу блоком задания частоты вращения, блок выделения ЭДС, подключенньй входами к выходам датчиков фазных токов и напряжений, первый сумматор, подключенный первым входом к выходу блока выделеНИН ЭДС, а выходом -- к входу регулятора напряжения, и-блок управления режимами работы, отличающий- с я тем, что, с целью снижения энергетических затрат за счет оптимизации режима работы, введены второй и третий сумматоры, блок управляемых ключей с коммутируемым и уп- . равляющим входами, лшравляемый мало- мощньй выпрямитель, блок синхронизациИэ корректирующий регулятор с основным входом и входом переключения - и блок вычисления корректирующего управляющего напряжения с двумя группами входов, а блок управления режимами работы выполнен в .виде фор- мирователя тактирующих импульсов и снабжен входом синхронизации и шестью выходами, при этом- первая группа входов блока вычисления кор
71
ректнрующего управляющего напряжения подключена к соответствующим выходам датчиков фазных токов и напряжений, вторая группа входов подключена к соответствующим первым четырем выходам блока управления режимами работы, а выход блока вычисления кор ректирующего управляющего напряжения подключен к первому входу второго сумматора, соединенного выходом с входом корректирующего регулятора, выход которого подключен к управляющему входу управляемого маломощного выпрямителя, подключенного выходом к коммутируемому входу блока управляемых ключей, выход которого под508028
ключен к второму входу второго-сумматора и к первому входу третьего сумматора, подключенного вторым входом к выходу блока задания частоты вращения, а выходом - к второму входу первого сумматора, пятый и шестой выходы блока управления режимами работы подключены соответственно к д управляющему входу блока управляемых ключей и к входу переключения коррек тирующего регулятора, а вход синхронизации блока управления режимами работы соединен с выходом блока 15 синхронизации, подклю ченного входами к выходам датчиков фазных токов и напряжений.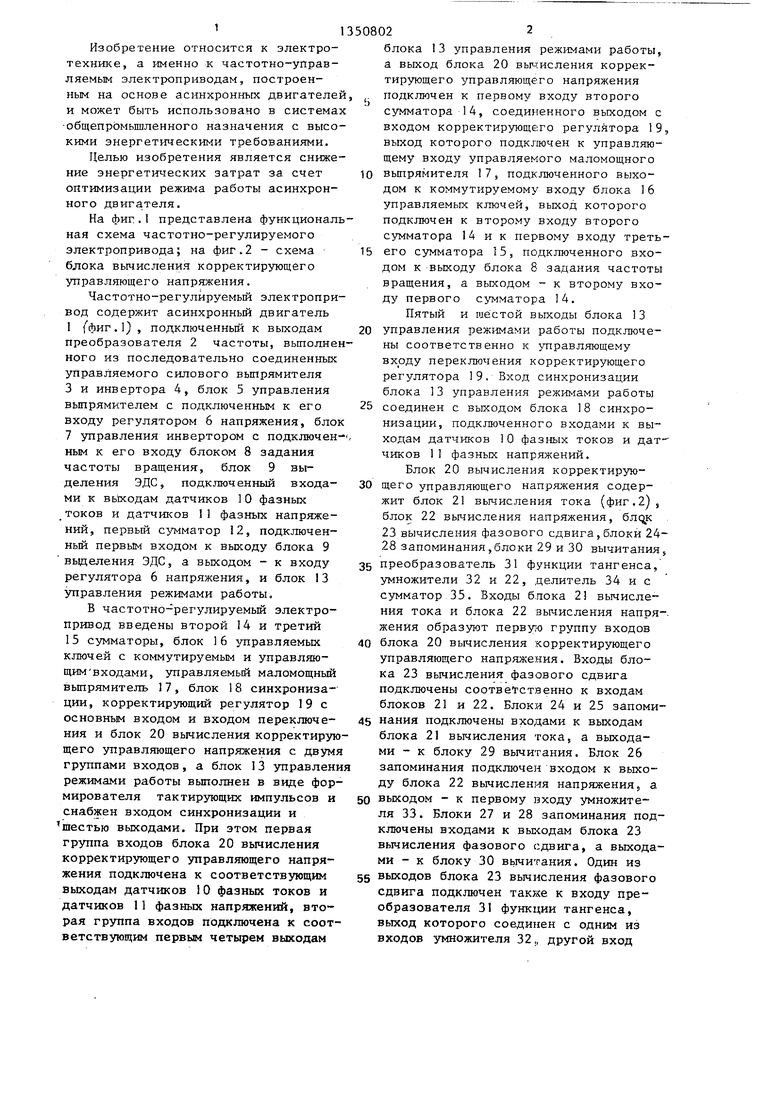


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2619919C1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК И РЕКУПЕРАЦИИ ЭНЕРГИИ В СЕТЬ, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2657007C1 |
| Устройство управления высоковольтным преобразователем частоты | 2018 |
|
RU2682164C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2514439C2 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Устройство для управления тиристорным выпрямителем | 1989 |
|
SU1612360A1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
Изобретение относится к электротехнике и может быть использовано в системах общепромышленного назначения. Целью изобретения является снижение энергетических затрат за счет оптимизации режима работы асинхронного двигателя. Указанная цель достигается тем, что в частотно-регулируемый электропривод введены сумматоры 14, 15, блок 16 управляемых ключей, управляемый выпрямитель 17, блок 18 синхронизации, корректирующий регулятор 19 и блок 20 вычисления корректирующего управляющего напряжения. Благодаря этому обеспечивается оптимальный режим работы электропривода с минимальными потерями передаваемой в ротор двигателя 1 мощности. 2 ил. (Л
auj
Составитель А.Жилин Редактор И.Николайчук Техред И.Попович Корректор С.Шекмар
Заказ 5295/55 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| Патент США № 3909687, кл.137-106, 1975 | |||
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
