подключение блока 25 к ротору асинхронного двигателя . В результате с помощью указанных блоков появляет- ся возможность в момент подключения преобразователя частоты 5 к двигателю 1 ориентировать определенным образом вектор выходного напряжения преобразователя частоты 5 относительно вектора ЭДС ротора, исключая перенапряжения. 4 ил.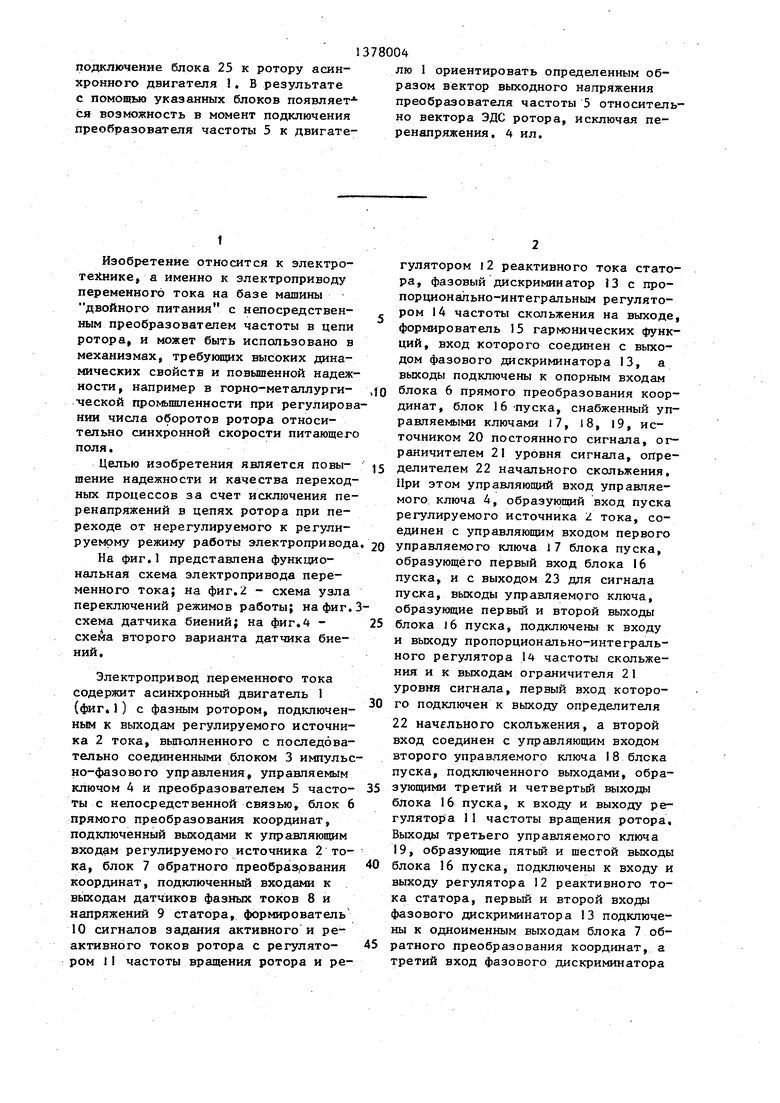
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| Электропривод переменного тока | 1984 |
|
SU1220100A2 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
Изобретение относится к электротехнике и может быть использовано в горно-металлургической проьышлен fem.uf. fliof. ности. Целью изобретения является по- вьавекие надежности и качества пере- ходшлх процессов эа счет исключения перенапряжений в цепях ротора при переходе от нерегулируемого к регулируемому режиму работы электропривода. Указанная цель достигается введением в электропривод переменного тока контактора 24, блока 25 резисторов, сумматора 26 в форьдарователе 10 сигналов задания активного и реактивного токов ротора и узла 27 переключений режимов работы в блоке 16 пуска. Входы сумматора 26 соединены с выхода14И регулятора 12 реактивного тока статора и источника 20 постоянного сигнала блока 16. Узел 27 входами связан с датчиками 8 и 9 тока и напряжения, а выходами - с уп- р авлянмдами входами ключей 17, 18 и 19 и контактора 24, обеспечивающего S l33uz,J
f
Изобретение относится к электро- тезШике, а именно к электроприводу переменного тока на базе машины двойного питания с непосредственным преобразователем частоты в цепи ротора, и может быть испсшьзовано в механизмах, требующих высоких динамических свойств и повышенной надежности, например в горно-металлурги- ческой промышленности при регулировании числа оборотов ротора относительно синхронной скорости питающего поля.
Целью изобретения является повы- шение надежности и качества переходных процессов за счет исключения перенапряжений в цепях ротора при переходе от нерегулируемого к регулируемому режиму работы электропривода
На фиг.1 представлена функциональная схема электропривода переменного тока; на фиг.2 - схема узла переключений режимов работы; на фиг, схема датчика биений; на фиг.4 - схема второго варианта датчика биений.
Электропривод переменного тока содержит асинхронный двигатель 1 () с фазным ротором, подключенным к выходам регулируемого источника 2 тока, выполненного с последовательно соединенными блоком 3 импульс но-фазового управления, управляемым ключом 4 и преобразователем 5 часто- ты с непосредственной связью, блок 6 прямого преобразования координат, подключенный выходами к управляющим входам регулируемого источника 2 тока, блок 7 обратного преобраз,ования координат, подключенный входами к выходам датчиков фазных токов 8 и напряжений 9 статора, формирователь 10 сигналов задания активного и реактивного токов ротора с регулято- ром J1 частоты вращения ротора и рео
5 0
5
0
5
гулятором 12 реактивного тока статора, фазовый дискриминатор 13 с пропорционально-интегральным регулятором 14 частоты скольжения на выходе, формирователь 15 гармонических функций, вход которого соединен с выходом фазового дискриминатора 13, а выходы подключены к опорным входам блока 6 прямого преобразования координат, блок 16 -пуска, снабженный управляемыми ключами 17, 18, 19, источником 20 постоянного сигнала, ограничителем 21 уровня сигнала, определителем 22 начального скольжения. При этом управляющий вход управляемого, ключа 4, образующий вход пуска регулируемого источника 2 тока, соединен с управляющим входом первого управляемого ключа 17 блока пуска, образующего первый вход блока 16 пуска, и с выходом 23 для сигнала пуска, выходы управляемого ключа, образукнцие первый и второй выходы блока 1б пуска, подключены к входу и выходу пропорционально-интегрального регулятора 14 частоты скольжения и к выходам ограничителя 21 уровня сигнала, первый вход которого подключен к выходу определителя
22 качельного скольжения, а второй вход соединен с управляющим входом второго управляемого ключа I8 блока пуска, подключенного выходами, образующими третий и четвертьй выходы блока 16 пуска, к входу и выходу регулятора 1 частоты вращения ротора. Выходы третьего управляемого ключа 19, образующие пятьй и шестой выходы блока 16 пуска, подключены к входу и выходу регулятора 12 реактивного тока статора, первый и второй входы фазового дискриминатора 13 подключены к одноименным выходам блока 7 обратного преобразования координат, а третий вход фазового дискриминатора
13 и первый управляющий вход блока 6 прямого преобразования координат подключены к первому выходу формирователя 10 сигналов задания активного и реактивного токов, ротора, второй выход которого подключен к второму управляющему входу блока 6 прямого преобразования координат. Первый, второй, третий и четвертый входы формирователя 10 сигналов задания активного и реактивного токов ротора подключены соответственно к третьему выходу блока 7 обратного преобразования координат, к выходу фазового дискриниминатора 13 и к выходам датчиков фазных токов 8 и напряжений 9 статора.
В электропривод переменного тока введены трехфазный контактор 24, блок 25 резисторов, причем формирователь 10 сигналов задания активного и реактивного токов ротора снабжен сумматором 26, блок 16 пуска снабжен седьмым выходом, образованным выходом источника 20 постоянного сигнала и узлом 27 переключений режимов работы.
Входы блока 3 импульсно-фазового управления в регулируемом источнике 2 тока подключены к выходу регулятора 28 фазных токов и к выходу блока 29 компенсации. На входе регулятора 28 фазных токов включен элемент 30 сравнения, первый вход которого образует управляющий вход регулируемого источника 2 тока, а второй подключен к выходу датчика 31 фазных токов ротора.
На вход регулятора 11 частоты вращения ротора подключен элемент 32 сравнения, а на вход регулятора 12 реактивного тока статора - элемент 33 сравнения. К выходу регулятора 11 частоты вращения ротора подключен блок 34 деления, другой вход которого соединен с выходом определителя 35 потокосцепления. Входы обратной связи элементов сравнения 33, 32 и входы определителя 35 потокосцепле- ния образуют соответственно первый, второй, третий и четвертьш входы формирователя 10 сигналов задания активного и реактивного токов ротора, первый и второй выходы которого образованы выходом блока 34 деления и выходом сумматора 26.
К входу пропорционально-интегрального регулятора 14 частоты сколь0
5
0
5
0
5
0
5
0
5
жения в фазовом дискриминаторе 13 подключен блок 36 деления, соединенный входом с выходом элемента 37 сравнения. Один из входов элемента 37 сравнения и другой вход блока 36 деления образуют первый и второй входы фазового дискриминатора 13. Другой вход элемента 37 сравнения образует третий вход фазового дискриминатора 13.
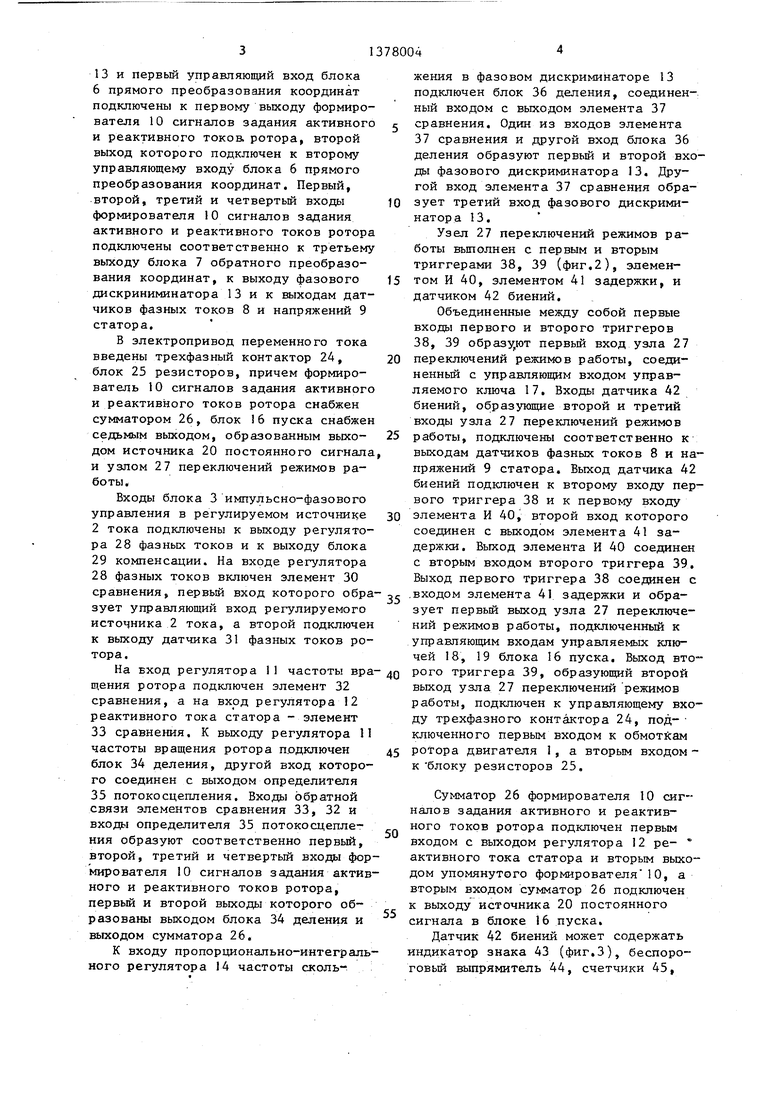
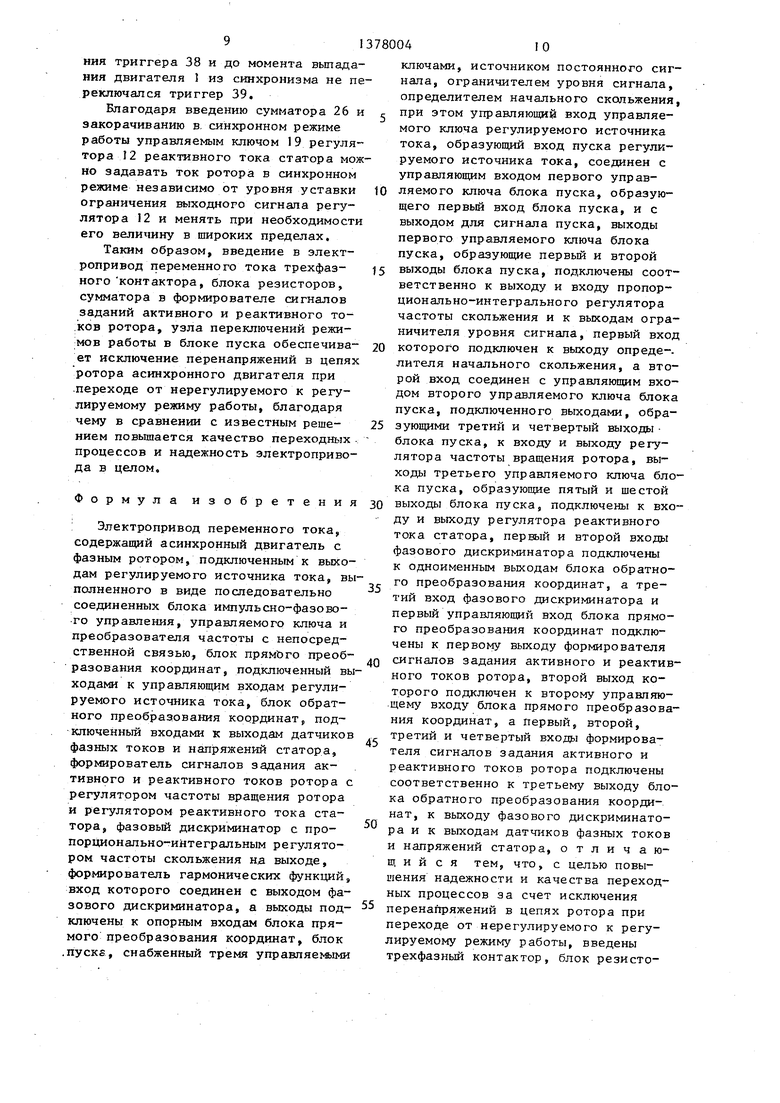
Узел 27 переключений режимов работы выполнен с первым и вторым триггерами 38, 39 (фиг.2), элементом И 40, элементом 41 задержки, и датчиком 42 биений.
Объединенные между собой первые входы первого и второго триггеров 38, 39 образу,ют первый вход узла 27 переключений режимов работы, соеди- ненньш с управляющим входом управляемого ключа 17. Входы датчика 42 биений, образующие второй и третий входы узла 27 переключений режимов работы, подключены соответственно к выходам датчиков фазных токов 8 и напряжений 9 статора. Выход датчика 42 биений подключен к второму входу первого триггера 38 и к первому входу элемента И 40, второй вход которого соединен с выходом элемента 41 задержки . Выход элемента И 40 соединен с вторым входом второго триггера 39. Выход первого триггера 38 соединен с .входом элемента 41 задержки и образует первый выход узла 27 переключений режимов работы, подключенный к управляющим входам управляемых ключей 18, 19 блока 16 пуска. Выход второго триггера 39, образующий второй выход узла 27 переключений режимов работы, подключен к управляющему входу трехфазного контактора 24, под- ключенного первым входом к обмотйам роТора двигателя 1, а вторым входом - к блоку резисторов 25.
Сумматор 26 формирователя 10 сиг-налов задания активного и реактивного токов ротора подключен первьм входом с выходом регулятора 12 ре- активного тока статора и вторым выходом упомянутого формирователя 10, а вторым входом сумматор 26 подключен к выходу источника 20 постоянного сигнала в блоке 16 пуска.
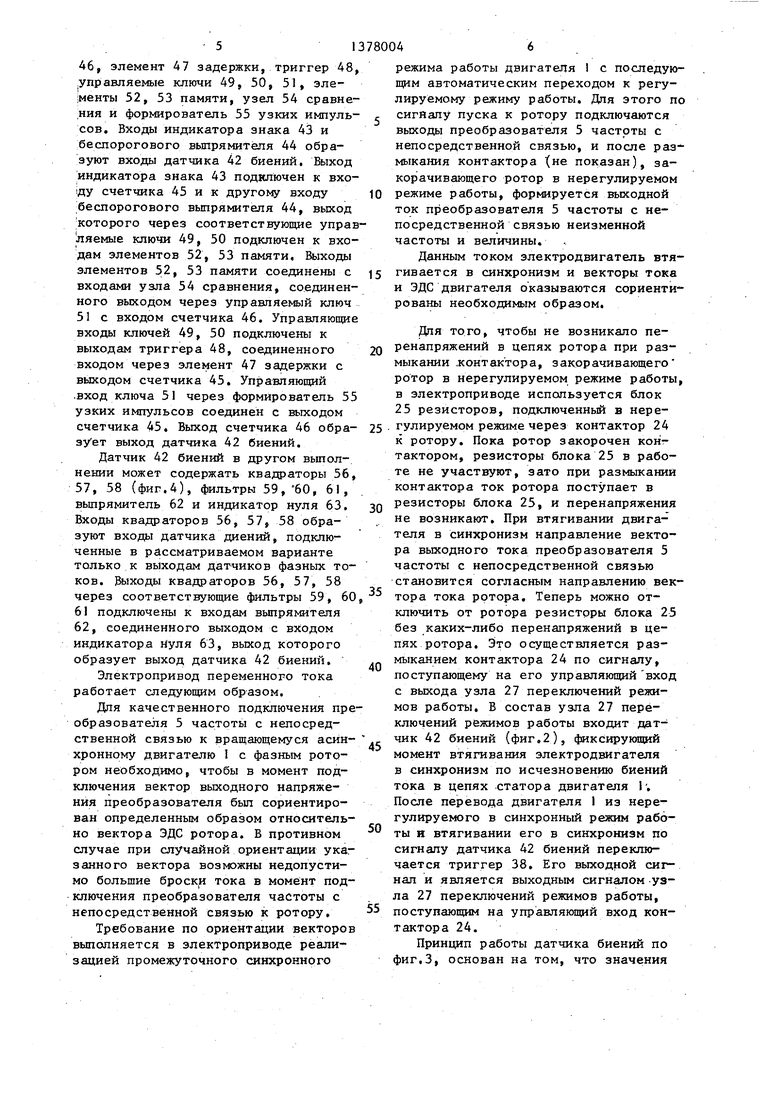
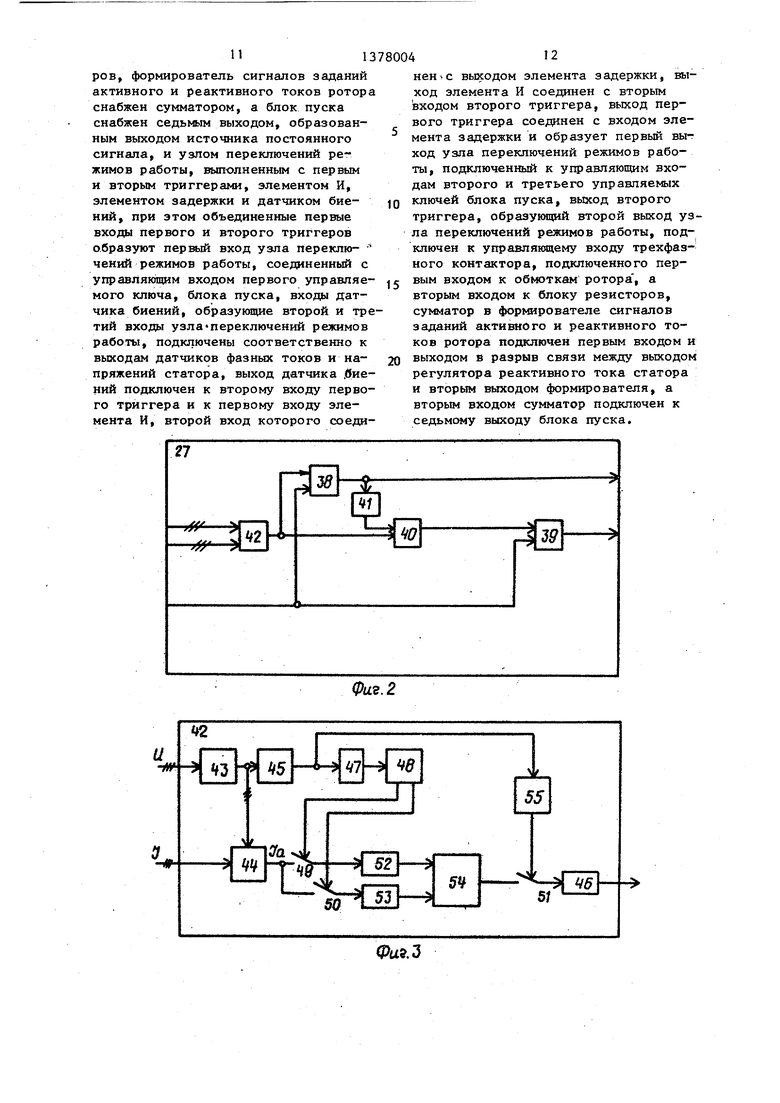
Датчик 42 биений может содержать индикатор знака 43 (фиг.З), беспороговый выпрямитель 44, счетчики 45,
46, элемент 47 задержки, триггер 48, управляемые ключи 49, 50, 51, эле- ;менты 52, 53 памяти, узел 54 сравнения и формирователь 55 узких импуль- сов. Входы индикатора знака 43 и беспорогового вьшрямитёля 44 образуют входы датчика 42 биений. Выход индикатора знака 43 подключен к входу счетчика 45 и к другому входу ю беспорогового вьтрямителя 44, выход которого через соответствующие управ- 1ляемые ключи 49, 50 подключен к входам элементов 52, 53 памяти. Выходы элементов 52, 53 памяти соединены с 15 входами узла 54 сравнения, соединенного выходом через управляемый ключ 51 с входом счетчика 46. Управляющие входы ключей 49, 50 подключены к выходам триггера 48, соединенного 20 входом через элемент 47 задержки с выходом счетчика 45. Управляющий .вход ключа 51 через формирователь 55 узких импульсов соединен с выходом счетчика 45. Выход счетчика 46 обра- 25 зу ет выход датчика 42 биений.
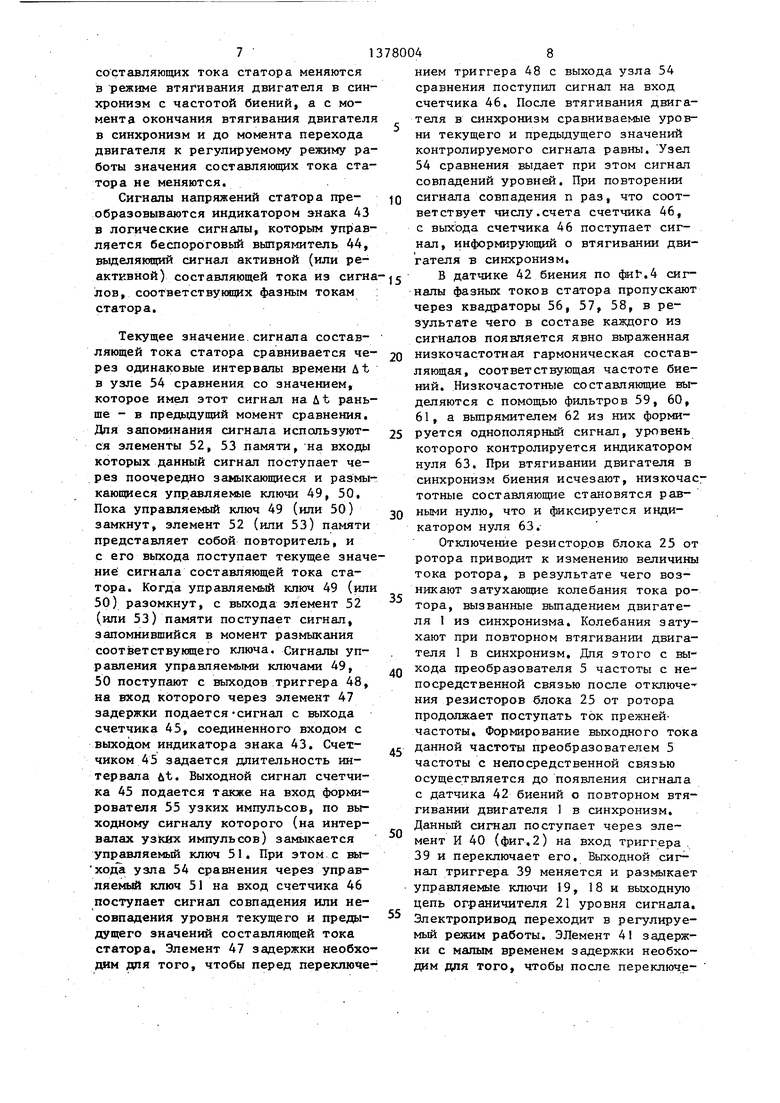
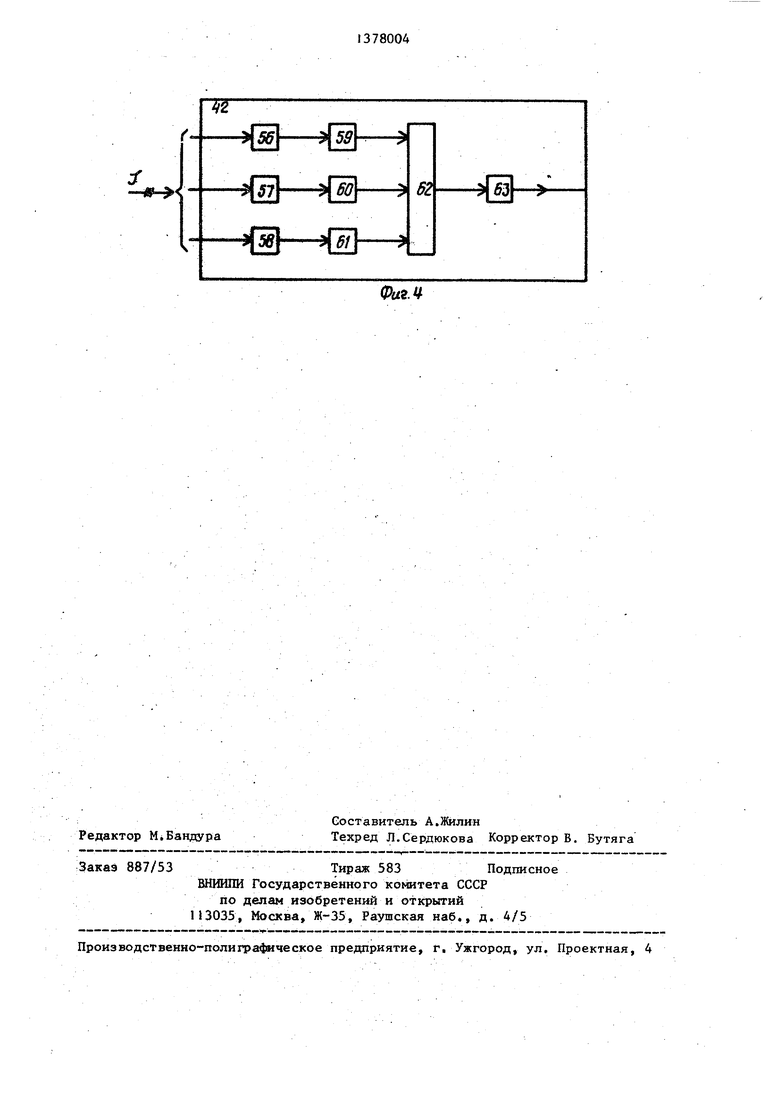
Датчик 42 биений в другом выполнении может содержать квадраторы 56, 57, 58 (фиг.4), фильтры 59, 60, 61, . вьшрямитель 62 и индикатор нуля 63. ЗО Входы квадраторов 56, 57, 58 образуют входы датчика диений, подключенные в рассматриваемом варианте только к выходам датчиков фазных токов. Выходы квадраторов 56, 57, 58
режима работы двигателя 1 с последу щим автоматическим переходом к регу лируемому режиму работы. Дня этого сигйапу пуска к ротору подключаются выходы преобразователя 5 частоты с непосредственной связью, и после ра мыкания контактора (не показан), за корачивающего ротор в нерегулируемо режиме работы, формируется выходной ток преобразователя 5 частоты с непосредственной связью неизменной частоты и величины.
Данным током электродвигатель вт гивается в синхронизм и векторы ток и ЭДС двигателя оказываются сориент рованы необходимым образом.
Для того, чтобы не возникало перенапряжений в цепях ротора при раз мыкании .контактора, закорачивающего ротор в нерегулируемом режиме работ в электроприводе используется блок 25 резисторов, подключенньй в нерегулируемом режиме через контактор 24 к ротору. Пока ротор закорочен конт- тактором, резисторы блока 25 в рабо те не участвуют, зато при размыкани контактора ток ротора поступает в резисторы блока 25, и перенапряжени не возникают. При втягивании двигателя в синхронизм направление векто ра выходного тока преобразователя 5 частоты с непосредственной связью становится согласным направлению ве
- ,,-,- - - -,. - .у -у г
через соответствующие фильтры 59, 60, тора тока ротора. Теперь можно от61 подключены к входам выпряг-ителя 62, соединенного выходом с входом индикатора Нуля 63, выход которого образует выход датчика 42 биений.
Электропривод переменного тока работает следующим образом,
Для качественного подключения преобразователя 5 частоты с непосредственной связью к вращающемуся асин- хронному двигателю 1 с фазным ротором необходимо, чтобы в момент подключения вектор выходного напряжения преобразователя был сориентирован определенным образом относительно вектора ЭДС ротора. В противном случае при случайной ориентации указанного вектора возможны недопустимо большие броски тока в момент подключения преобразователя частоты с непосредственной связью к ротору.
Требование по ориентации векторов выполняется в электроприводе реализацией промежуточного синхронного
режима работы двигателя 1 с последующим автоматическим переходом к регулируемому режиму работы. Дня этого по сигйапу пуска к ротору подключаются выходы преобразователя 5 частоты с непосредственной связью, и после раз мыкания контактора (не показан), закорачивающего ротор в нерегулируемом режиме работы, формируется выходной ток преобразователя 5 частоты с непосредственной связью неизменной частоты и величины.
Данным током электродвигатель втягивается в синхронизм и векторы тока и ЭДС двигателя оказываются сориентированы необходимым образом.
Для того, чтобы не возникало перенапряжений в цепях ротора при размыкании .контактора, закорачивающего ротор в нерегулируемом режиме работы в электроприводе используется блок 25 резисторов, подключенньй в нерегулируемом режиме через контактор 24 к ротору. Пока ротор закорочен конт- тактором, резисторы блока 25 в работе не участвуют, зато при размыкании контактора ток ротора поступает в резисторы блока 25, и перенапряжения не возникают. При втягивании двигателя в синхронизм направление вектора выходного тока преобразователя 5 частоты с непосредственной связью становится согласным направлению век
0
5
0
5
ключить от ротора резисторы блока 25 без каких-либо перенапряжений в цепях ротора. Это осуществляется размыканием контактора 24 по сигналу, поступающему на его управляющий вход с выхода узла 27 переключений режимов работы. В состав узла 27 переключений режимов работы входит датчик 42 биений (фиг.2), фиксирующий момент втягивания электродвигателя в синхронизм по исчезновению биений тока в цепях статора двигателя Г. После перевода двигатрля 1 из нерегулируемого в синхронный режим работы и втягивании его в синхронизм по сигналу датчика 42 биений переключается триггер 38. Его выходной сигнал и является выходным сигналом -узла 27 переключений режимов работы, поступающим на управляющий вход контактора 24.
Принцип работы датчика биений по фиг,3, основан на том, что значения
составляющих тока статора меняются в режиме втягивания двигателя в синхронизм с частотой биений, а с момента окончания втягивания двигателя в синхронизм и до момента перехода двигателя к регулируемому режиму работы значения составлякнцих тока статора не меняются.
Сигналы напряжений статора преобразовываются индикатором знака A3 в логические сигналы, которым упр1ав- ляется беспороговый выпрямитель 44, вьщеляющий сигнал активной (или реактивной) составляющей тока из сигналов, соответствующих фазным токам статора.
Текущее значение сигнала составляющей тока статора сравнивается через одинаковые интервалы времени At в узле 54 сравнения со значением, которое Имел этот сигнал на it раньше - в предьщущий момент сравнения. Hfia запоминания сигнала используются элементы 52, 53 памяти, на входы которых данный сигнал поступает через поочередно замыкающиеся и размы- упр.авляемые ключи 49, 50. Пока управляемый ключ 49 (или 50) замкнут, элемент 52 (или 53) памяти представляет собой повторитель, и с его вьпсода поступает текущее значение сигнала составляющей тока статора. Когда управляемый ключ 49 (или 50) разомкнут, с выхода элемент 52 (или 53) памяти поступает сигнал, запомнившийся в момент размыкания соответствующего ключа. Сигналы управления управляемыми ключами 49, 50 поступают с выходов триггера 48, на вход которого через элемент 47 задержки подается-сигнал с выхода счетчика 45, соединенного входом с выходом индикатора знака 43. Счетчиком 45 задается длительность интервала ut. Выходной сигнал счетчика 45 подается также на вход формирователя 55 узких импульсов, по выходному сигналу которого (на интервалах узких импульсов) замыкается управляемый ключ 51. При этом с вы- хода узла 54 сравнения через управляемый ключ 51 на вход счетчика 46 поступает сигнал совпадения или несовпадения уровня текущего и предыдущего значений составляющей тока статора. Элемент 47 задержки необходим дпя того, чтобы перед переключе0
5
0
5
0
5
0
5
0
5
нием триггера 48 с выхода узла 54 сравнения поступил сигнал на вход счетчика 46. После втягивания двигателя в синхронизм сравниваемые уровни текущего и предьщущего значений контролируемого сигнала равны. Узел 54 сравнения выдает при этом сигнал совпадений уровней. При повторении сигнала совпадения п раз, что соответствует числу.счета счетчика 46, с выхода счетчика 46 поступает сигнал, информирующий о втягивании двигателя в синхронизм.
В датчике 42 биения по фиГ.А сигналы фазных токов статора пропускают через квадраторы 56, 57, 58, в результате чего в составе каждого из сигналов появляется явно выраженная низкочастотная гармоническая составляющая, соответствующая частоте биений. Низкочастотные составляющие выделяются с помощью фильтров 59, 60, 61, а выпрямителем 62 из них формируется однополярный сигнал, уровень которого контролируется индикатором нуля 63. При втягивании двигателя в синхронизм биения исчезают, низкочастотные составляющие становятся равными нулю, что и фиксируется индикатором нуля 63.
Отключение резистор.ов блока 25 от ротора приводит к изменению величины тока ротора, в результате чего возникают затухающие колебания тока ротора, вызванные вьтадением двигателя 1 из синхронизма. Колебания затухают при повторном втягивании двигателя 1 в синхронизм. Дпя этого с выхода преобразователя 5 частоты с непосредственной связью после отключе- ния резисторов блока 25 от ротора продолжает поступать ток прежней- частоты. Формирование выходного тока данной частоты преобразоватапем 5 частоты с непосредственной связью осуществляется до появления сигнала с датчика 42 биений о повторном втягивании двигателя в синхронизм. Данный сигнал поступает через элемент И 40 (фиг,2) на вход триггера 39 и переключает его. Выходной сигнал триггера 39 меняется и размыкает управляемые ключи 19, 18 и выходную цепь ограничителя 21 уровня сигнала. Электропривод переходит в регулируемый режим работы, элемент 4 задержки с малым временем задержки необходам дпя того, чтобы после переключе
9
ния триггера 38 и до момента вьтад ния двигателя 1 из синхронизма не реключался триггер 39,
Благодаря введению сумматора 26 закорачиванию в. синхронном режиме работы управляемым ключом 19 регул тора 12 реактивного тока статора мно задавать ток ротора в синхронно режиме независимо от уровня уставк ограничения выходного сигнала регулятора 12 и менять при необходимос его величину в широких пределах.
Таким образом, введение в электропривод переменного тока трехфазного контактора, блока резисторов, сумматора в формирователе сигналов заданий активного и реактивного то .ков ротора, узла переключений режимов работы в блоке пуска обеспечивет исключение перенапряжений в цеп ротора асинхронного двигателя при .переходе от нерегулируемого к регулируемому режиму работы, благодаря чему в сравнении с известным решением повьшается качество переходны процессов и надежность электропривда в целом.
Формула изобретения
; Электропривод переменного тока, содержащий асинхронный двигатель с фазным ротором, подключенным к выходам регулируемого источника тока, выполненного в виде последовательно соединенных блока импульсно-фазово- го управления, управляемого ключа и преобразователя частоты с непосред
ственной связью, блок прямЬго преобразования координат, подключенный выходами к управляющим входам регулируемого источника тока, блок обратного преобразования координат, подключенный входами к выходам датчиков фазных токов и напряжений статора, формирователь сигналов задания активного и реактивного токов ротора с регулятором частоты вращения ротора и регулятором реактивного тока статора, фазовый дискриминатор с пропорционально-интегральным регулятором частоты скольжения нв выходе, формирователь гармонических функций, вход которого соединен с выходом фазового дискриминатора, а выходы подключены к опорным входам блока прямого преобразования координат, блок .пуске, снабженный тремя управляемыми
10
0
5
0
О
ключами, источником постоянного сигнала, ограничителем уровня сигнала, определителем начального скольжения, при этом управляющий вход управляемого ключа регулируемого источника тока, образующий вход пуска регулируемого источника тока, соединен с управляющим входом первого управляемого ключа блока пуска, образующего первый вход блока пуска, и с выходом для сигнала пуска, выходы первого управляемого ключа блока пуска, образующие первый и второй выходы блока пуска, подключены соответственно к выходу и входу пропорционально-интегрального регулятора частоты скольжения и к выходам ограничителя уровня сигнала, первый вход которого подключен к выходу опреде-. лителя начального скольжения, а второй вход соединен с управляющим входом второго управляемого ключа блока пуска, подключенного выходами, обра5 зующими третий и четвертый выходы блока пуска, к входу и выходу регулятора частоты вращения ротора, выходы третьего управляемого ключа блока пуска, образующие пятый и шестой выходы блока пуска, подключены к входу и выходу регулятора реактивного тока статора, первый и второй входы фазового дискриминатора подключены к одноименным выходам блока обратного преобразования координат, а третий вход фазового дискриминатора и первый управляющий вход блока прямого преобразования координат подключены к первому выходу формирователя сигналов задания активного и реактивного токов ротора, второй выход которого подключен к второму управляющему входу блока прямого преобразования координат, а первый, второй, третий и четвертый входа) формирователя сигналов задания активного и реактивного токов ротора подключены соответственно к третьему выходу блока обратного преобразования координат, к выходу фазового дискриминато- ра и к выходам датчиков фазных токов и напряжений статора, о т л и ч а ю- щ и и с я тем, что, с целью повышения надежности и качества переходных процессов за счет исключения
5 перенапряжений в цепях ротора при переходе от нерегулируемого к регулируемому режиму работы, введены трехфазный контактор, блок резисто5
0
5
1113
ров, формирователь сигналов заданий активного и реактивного токов ротора снабжен сумматором, а блок пуска снабжен седьмым выходом, образованным выходом источника постоянного сигнала, и узлом переключений режимов работы, выполненным с первым и вторым триггерами, элементом И, элементом задержки и датчиком биений, при этом объединенные первые входы первого и второго триггеров образуют первый вход узла переклю- чений режимов работы, соединенный с управляющим входом первого управляемого ключа, блока пуска, входы датчика биений, образукндие второй и третий входы узла«переключений режимов работы, подключены соответственно к вькодам датчиков фазных токов и напряжений статора, выход датчика .биений подключен к второму входу первого триггера и к первому входу элемента И, второй вход которого соеди
Jff
0
004
5
0
12
нен с выходом элемента з адержки, выход элемента И соединен с вторым входом второго триггера, выход первого триггера соединен с входом элемента задержки и образует первый вы ход узла переключений режимов работы, подключенный к управляющим входам второго и третьего управляемых ключей блока пуска, выход второго триггера, образующий второй выход узла переключений режимов работы, подключен к управляющему входу трехфазного контактора, подключенного первым входом к обмоткам ротора , а вторым входом к блоку резисторов, сумматор в формирователе сигналов заданий активного и реактивного токов ротора подключен первым входом и выходом в разрыв связи между выходом регулятора реактивного тока статора и вторым выходом формирователя, а вторым входом сумматор подключен к седьмому выходу блока пуска.
Фиу.2
Фаг.З
62
53h-
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
