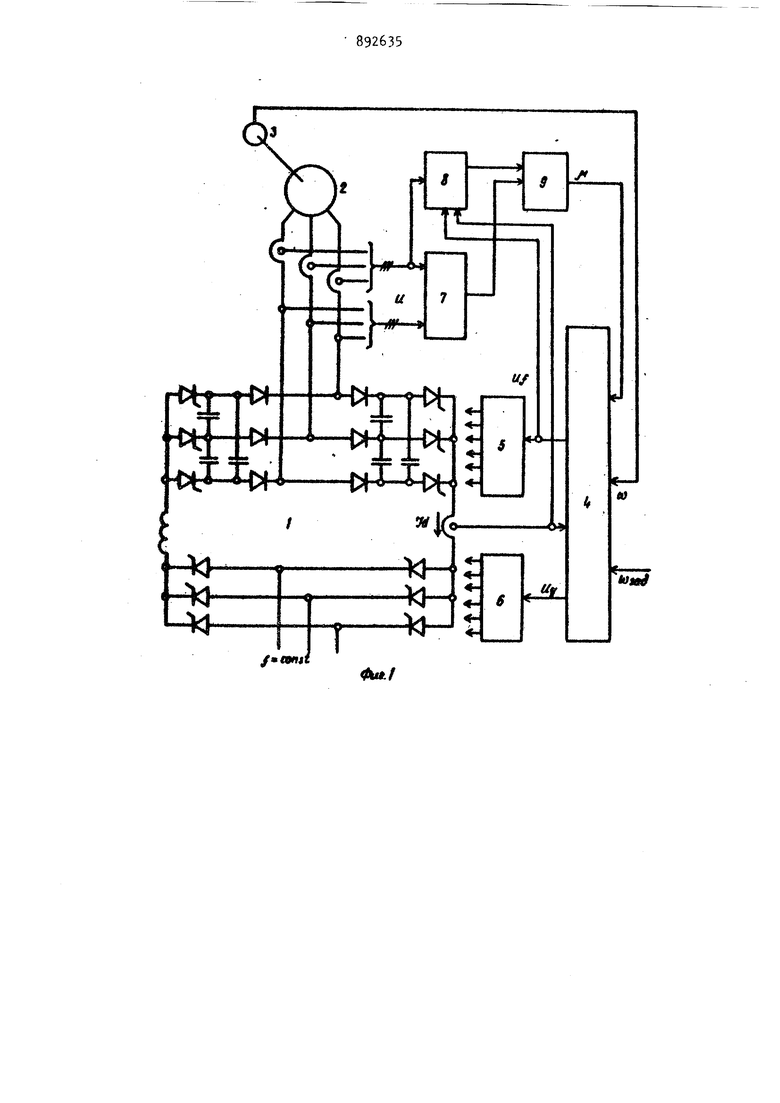
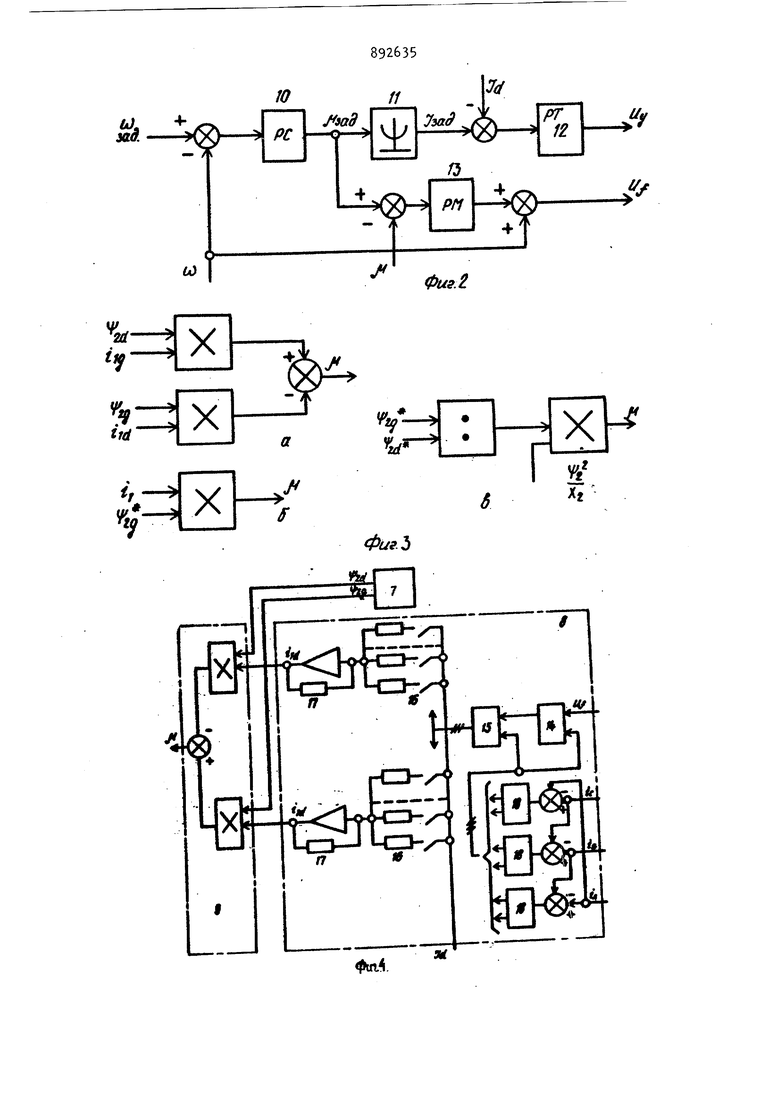
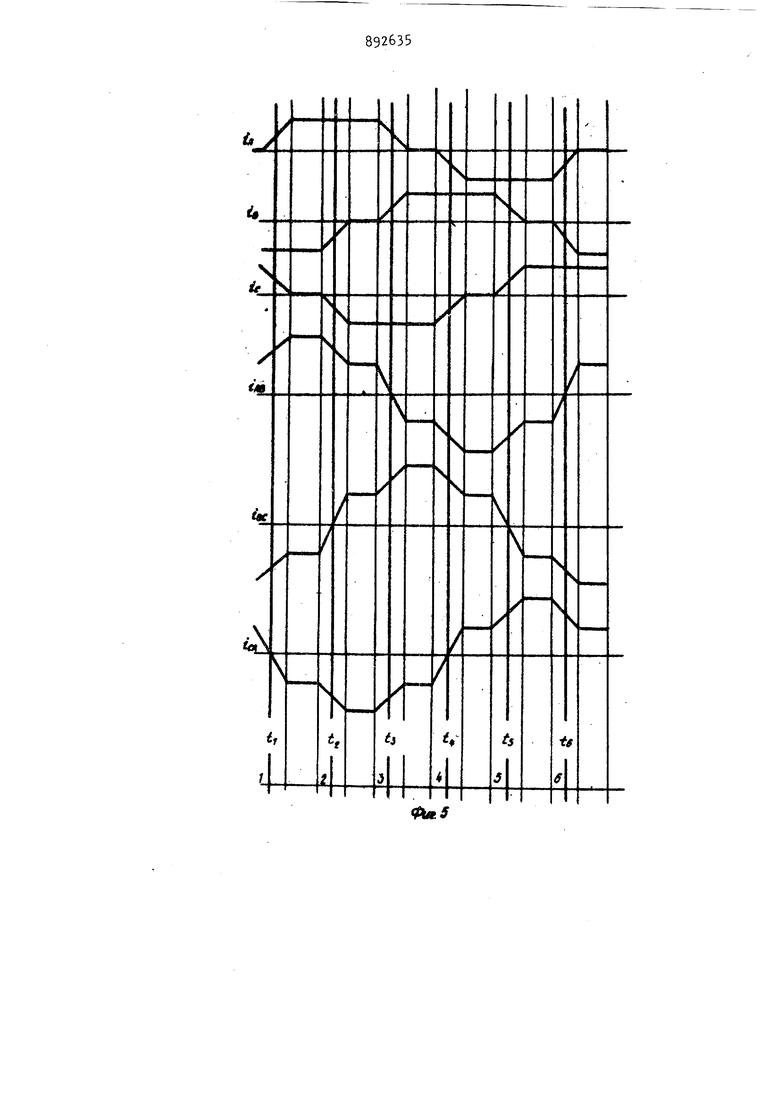
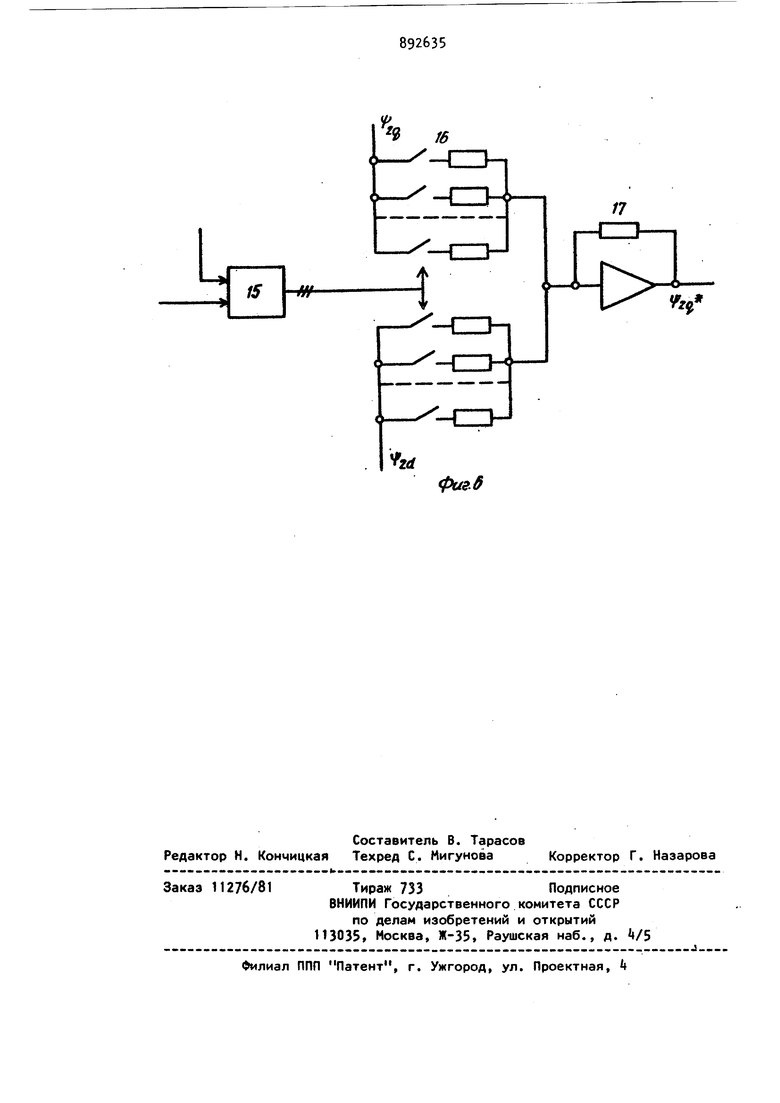
Изобретение относится к электротехнике и может быть использовано в автоматизированном тиристорном электроприводе переменного тока. Известен частотно-регулируемый электропривод переменного тока, который содержит преобразователь частоты на основе автономного инвертора и асинхронный короткозамкнутый двигатель. Система регулирования амплитуды и частоты напряжения на зажимах двигателя выполнена на основе регулятора частоты вращения, кроме того, для улучшения динамических характеристик привода используется регулятор момента двигателя. В качестве сигнала момента используется фактический ток двигателя, коммутируемый ключами, которые управляются сигналами специально выделенной внутренней ЭДС двигате лйПЗ, Недостатком устройства является низкое быстродействие системы автоматического регулирования момента двигателя, а следовательно, и частоты вращения электроп зивода, (Особенно при глубоком регулировании скорости двигателя вниз, связанное с плохим качеством сигнала на выходе датчика электромагнитного момента двигателя. Сигнал датчика момента содержит кроме гладкой (полезной) составляющей больше переменные составляющие (помехи) , частота которых кратна выходной частоте инвертора и koTopbie необходимо отфильтровать, ухудшая тем самым быстродействие системы регулирования. Наиболее близким техническим решением к предлагаемому является частотно-регулируемый электропривод переменного тока, содержащий преобразователь частоты, состоящий из инвертора тока с регулируемым звеном постоянного тока на базе выпрямителя, к выходу которого подсоединен синхронный двигатель с датчиком скЬрости на валу блок автоматического регулирования частотой и напряжением, входы которого соединены с датчиком скорости, задатчиком скорости с фор мирователем момента и с датчиком пол ного тока в цепи питания инвертора, а выходы - с блоками управления частотой и током преобразователя, датчи ки напряжения и фазного тока двигателя, выходы которых через блок определения потокосцепления соединены с блоком формирования момента, други входы которых через формирователь ве торз тока соединены с датчиками фазного тока двигателя 2 , Недостатком этого устройства является наличие большего уровня помех в сигнале датчика момента, которые необходимо отфильтровать, что снижает быстродействие. Цель изобретения - повышение быстродействия привода. Поставленная цель достигается тем что в частотно-регулируемом электроприводе формирователь вектора тока дополнительно содержит задающий генератор, пересчетное кольцо, формирователи ступенчатых гармонических сигналов с ключевыми элементами, нуль-органы, два сумматора - формирователя ортогональных проекций результирующего вектора фазных токов и блоки сравнения, причем вход задающего генератора соединен со входом блока управления частотой преобразователя, а выход его - с входом пересчетного кольца, выходные зажимы которого соединены с управляющими входами ключевых элементов формирователей ступенчатых гармонических сигналов, к силовым входам которых подключен датчик полного тока двигателя, а выходы через два сумматора - (}уормирователя ортогональных проекций результирующего вектора фазных токов соединены со входами блока формирования момента, ко входам установки исходного состояния дополнительного задающего генератора и пересчетной логической схемы подключены прямые и инверсные выходы нуль-органов, вхо каждого из которых подключен к выход соответствующего блоков сравнения, а вход каждого блока сравнения соеди нены с датчиком тока соответствующей фазы и датчиком тока фазы, сдвинутой на 120 эл.градусов. На фиг, показана принципиальная схема чзстотно-регулируемого синхрон ного электропривода; на фиг. 2 - бло 5 . 4 схема блока автоматического регулирования частоты и напряжения; на фиг. 3 - примеры формирования сигнала момента асинхронного двигателя; на фиг. раскрыто выполнение блока формирования вектора тока; на фиг.5 - графики фазных, линейных токов двигателя и импульсов перехода через нуль линейных токов; на фиг. 6 - блок формирования проекции потокосцепления ротора в системе координат тока статора. Частотно-регулируемый электропривод содержит преобразователь 1 частоты, к которому подсоединен асинхронный электродвигатель 2 с датчиком 3 скорости на его валу. Блок автоматического регулирования частотой и напряжения соединен с блоками 5 и 6 управления частотой и напряжением соответственно. Блок 7 определения потокосцепления и блок 8 формирования вектора тока выходами соединены с блоком 9 формирования момента. Блок j (фиг. 2) автоматического регулирования частотой и напряжением содержит регулятор 10 частоты вращения, соединенный с функциональным преобразователем 11, регулятор 12 тока и регулятор 13 момента. На фиг. 3 приведены примеры устройств формирования сигнала момента асинхронного двигателя в результате перемножения величин проекций потокосцепления ротора на продольную ось Чпд или поперечную на соответствующие проекции тока статора на (варианты а, б) те же оси i или в результате деления величин потокосцепления Id последующим умножением результатов деления на величину yi , где У индуктивное сопротивление ротора. Блок 8 (фиг. i) формирования вектора тока содержит задающий генератор I, подключённый выходом к пересчетному кольцу 15, ключевые элементы 16, сумматоры-формирователи 17 ортогональных проекций результирующего вектора фазных токов, нуль-органы 18. Обмотка статора асинхронного электродвигателя 2 запитана переменным по амплитуде и частоте током от преобразователя 1 частоту. Блок 4 определяет амплитуду и частоту переменного тока. На входе регулятора 10 скорости сравниваются сигналы задания и обратной связи по частоте вращения. Выходной сигнал регулятора 10 скорости является заданием момента двигателя Mjg., который преобразуется в функциональном преобразователе 11 в сигнал задания амплитуды тока ftdA статора. На входе регулятора 12 тока сравниваются сигналы задания го ка tjgg, и тока 17д , выходной сигнал и регулятора тока, поступает на вход блока 6. Кроме того, сигнал задания момента М. электродвигателя сравнивается на выходе регулятора 13 момента с сигналом фактического момента Н. Сумма выходного сигнала регулятора момента и сигнала датчика 3 скорости является сигналом , определяющим частоту инвертора. Данный сигнал подается на вход блока 5, где он преобразуется в последовательность импульсов, частота которых про порциональна сигналу Ur и которые распределяются, усиливаются и подают ся на тиристоры инвертора. Датчиком момента двигателя является система, включающая блоки 7-9. Для пояснения работы, рассмотрим расчетные соотношения для момента асинхронного электродвигателя. м к хТ, М KQ ty-ixT l (1) М Kf Момент асинхронного двигателя может быть рассчитан как векторное про изведение результирующего вектора полного потока Ч статора либо потока 5 ij ротора, либо потока Q в зазоре и результирующего вектора тока Т, статора, К, KQ,, К - коэффицие нт пропорциональности. Потоки и vJij измеряются косвенным способом, поток Чо можно измерить либо косвенно, ли бо встраиванием в зазор машины датчиков ЭДС Холла или специальных измерительных обмоток в пазы статора. Ввод датчиков внутрь машины требует ее переделки, поэтому целесообразны косвенные способы измерения потока. С точки зрения сложности измерения потоки Ч ,, Ч и практически разнозначны, но поток f обладает наибольшей помехозащищенностью от отрицательного влияния высших гармоник тока статора, поэтому для повышения качества сигнала момента рассматривается именно поток . Измерение проекции результирующего вектора потока осуществляется в блоке 7 согласно следующим соотношениям,-/l-Vv.b; vStvv, где Un,U,Uj. - фазные напряжения двигателя;А бс- фэзные токи; г - оммическое сопротивление обмотки статора. Составляющие потока MQ в установившемся режиме работы изменяются практически по гармоническому закону несмотря на то, что ток статора несинусоидальный. Объясняется данное . обстоятельство фильтрующим действием короткозамкнутого ротора. Составляющие результирующего вектора тока статора определяются соотношением (i,Эти сигналы периодические, но не гармонические. Если датчик электромагнитного момента выполнить согласно соотношению ixTil i4( На Х) - проекции реального вектора тока, то сигнал момента содержит периодические составляющие. Чтобы исключить периодические составляющие сигнала момента, в электроприводе используют синте ированные сигналы проекций тока i, coenai . дающие с основной гармоникой соответствующих проекций реального тока, при этом сигнал момента соответствует гладкой составляющей реального момента. Синтезировать периодические си1- налы проекций тока (синусную и косинусную составляющие) возможно, поскольку имеется сигнал выходной частоты инвертора. Это осуществляется блоком 8. Сигнал Uf подается на задающий генератор lU (фиг. ) аналогового сигнала в последовательность импульсов, частота которого пропорциональна величине сигнала Up. При этом получается, что частота выходных импульсов задающего генератора И пропорциональна выходной частоте инвертора. Выходные импульсы задающего генератора 1 управляют пересчет-i ным кольцом 15 на логических элементах с памятью, период изменения состояния которой соответствует периоду выходной частоты инвертора. Логические сигналы пересчетного кольца 1 управляют состоянием ключевых элементов 16, которые подключают источник напряжения через соответствующим образом выбранные сопротивления на входы двух сумматоров-формирователей 17« На выходах сумматоров-формирователей 17 получают близкие к гладким гармонические сигналы, причем степен приближения к гладкой кривой может быть любой и достигается увеличением числа ступеней. Если в качестве напря жения на входах сумматоров-формирователей 17 использовать постоянную вел чину и Const, то на выходе получают опорные сигналы проекции тока i. , если использовать напряжение, пропорцио нальное токуЛ , то на выходах сумматоров-формирователей 17 получают сигналы проекций тока i-i . Опорные сигналы и сигналы проекций тока i , могут использоваться для формирования сигнала момента. Однако синтезированные с помощью рассмотренного варианта блока 8 моде лирующие сигналы не соответствуют фа тической основной гармонике тока дви гателя по двум причинам. Идеальное совпадение характеристик блока 5, который определяет фактическую выходную частоту инвертора, и блока 8 невозможно, всегда есть расхождение по частоте, которое приведет к фазовой погрешности, меняющейся в пределах (О - ) рад. Кроме того, фаза выходного тока инверто ра из-за влияния устройств принудительной коммутации не остается постоянной относительно управляющих импульсов инвертора, а меняется при изменении частоты и режима работы двигателя. Чтобы исключить эти отрицательные обстоятельства на фиг. k показано дополнительный блок синхронизации частоты задающего генератора И и состояния пересчетного кольца 15 импульсами, жестко привязанными к фазе основной гармоники фактического тока двигателя. У автономного инвертора тока, широко используемого для целей частотного регулирования, фазный ток не имеет ха рактерных участков для формирования импульсов, фиксирующих фазу. Поэтому предлагается по фазным токам формировать линейные Ав А - 8 isc и - ic СА с А И фиксировать с помощью нуль-органа 18 моменты перехода линейных токов через ноль. Эти моменты соответствуют максимальному значению основной гармоники фазного т©ка (фиг, 5). Так, импульс t соответствует отрицательному максимуму основной гармоники тока фазы В, t - положительному фазы А и т.д. Каждому импульсу должно соответствовать вполне определенное состояние пересчетного кольца 15, в которое она и устанавливается данным импульсом. Кроме того, все импульсы нуль-органов 18 устанавливают задающий генератор в исходное состояние. Вследствие вводимой импульсной коррекции системы формирования гармонических сигналов тока инвертора достигается высокая точность воспроизведения основной гармоники инвертируемого тока. Полученные сигналы тока статора используются для формирования си(- нала момента в соответствии с соотношением (). Поскольку сигналы проекции тока и потока гармонические, получаем гладкий и непрерывный сигнал момента двигателя, который не требует загрубления быстродействующих систем автоматического регулирования. Это не единственный пример использования предлагаемого синтезированного сигнала основной гармоники тока двигателя при синтезе систем регулирования. Существуют задачи приведения электромагнитрных величин к системе координат тока статора для этого используются в качестве сомножителей опорные сигналы. Например, в устройстве (фиг. 3 6J используется сигнал проекции вектора потокосцепления ротора на мнимую ось системы координат, связанной с вектором статорного тока. 8 последнем случае можно упростить устройство, не ормируя опорных сигналов (ортов системы координат, связанной с вектором тока статора, в неподвижной системе оординат) с последующим умножением а проекции.вектора потокосцепления неподвижной системе координат п M(j , а подать на входы ключей 16 игналы (д и , (фиг 6). Экономический эффект достигается овышением производительности мехаизмов, обусловленной большим быстодействием автоматизированного лектропривода.
Формула изобретения
Частотно-регулируемый электропривод переменного тока, содержащий асинхронный электродвигатель и преобразователь частоты, составленный из инвертора тока с регулируемым звеном постоянного тока на базе выпрямителя, к выходу которого подсоединен асинхронный электродвигатель, датчик скорости, установленный на валу указанного электродвигателя, блок автоматического регулирования частотой и напряжением, входы которого соединены с датчиком скорости, задатчиком скорости, формирователем моменту и с датчиком полного тока в цепи питания инвертора соответственно, а выходы - с блоками управления частотой и током преобразователя соответственно, датчики напряжения и фазного тока асинхронного электродвигателя, выходы которых через блок определения потокосцепления соединена с блоком формирования момента, другие вхо ды которого через формирователь вектора тока соединены с датчиками фазного тока двигателя, отличающийся тем, что, с целью повышения быстрсудействия, в формирователь вектора тока дополнительно введен .задающий генератор, пересчетное кольцо, формирователи с ключевыми элементами ступенчатых гармонических сигналов с нуль-органами, два сумматора-формирователя ортогональных проекций результирующего вектора фазных токов, и блоки сравнения, причем вход задающего генератора соединен со входом блока управления частотой преобразователя, а выход его - с входом пересчетного кольца, выходные зажимы которого соединены с управляющими входами ключевых элементов формирователей ступенчатых гармонических сигналов, к силовым входам которых подключен датчик полного тока двигателя, а выходы через два сумматораформиробателя ортогональных проекций результирующего вектора фазовых токов соединены со входом блока формирования момента, ко входам установки исходного состояния дополнительного задающего генератора и пересчетного кольца подключены прямые и инверсные выходы нуль-органов, вход каждого из которых подключен к выходу соответствующего блока сравнения, а вход каждого блока сравнения соединен с датчиком тока соответствующей фазы.и с датчиком тока фазы, сдвик той на 120 эл. градусов.
Источники инфдрмации, принятые во внимание при экспертизе
1.Патент США V i 08893«, кл. 318-227, 1978.
2.Патент ФРГ tf , кл. Н 02 Р 5/36, 1975.
0USZ
Х
х
X
f
X
г
/
Фиг.Ъ
т.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электропривод | 1978 |
|
SU797043A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
fi
-ts
/7
