привода входит формирователь (Ф) 8 сигналов задания активного и реактивного токов ротора. Входы 9-11 Ф 8 соединены соответственно с датчиками 6 и 7 и третьим входом блока 5 обратного преобразования координат, входы которого соединены с датчиками 6 и 7. Один выход Ф 8 подключен к первому входу сумматора (С) 18, другой выход Ф8.- к третьему входу фазового дискриминатора (ФД) 13. Выход ФД 13 соединен с первым входом С 17, выход которого соединен с входом Ф А гармонических . функций. Выходы Ф 4 связаны с опорными входами блока 3 прямого преобразования координат. Выход блока 3 соединен с управляющим входом РИ 2. Управляющие входы блока 3 подключены к соответствующему выходу Ф 8 и выходу С 18. Входы 14 и 15 ФД 13 подключены к первому и второму выходам блока 5 и к входам индикаторов (И) 24 и 25 уровней узла (У) 19 пуска. Второй вход И 24 соединен с выходом задатчика 23 реактивного тока У 19 и вторым входом -С 18. Выходы И 24 и 25 подключены к входам блока 26 разрешения пуска, выход которого подключен к первому входу блока 27 запоминания сигнала, к управляющему входу ключа (К) 30 и входам 20 и 21 разрешения работы Ф 8 и ФД 13. Трети вход блока 26 соединен с входом 22 разрешения работы РИ 2. Второй вход
блока 27 через управляющий К 29 соединен с выходом датчика 31 начального скольжения и входом блока 28 задания предельной частоты. Выход бло ка 27 подключен к второму входу С 17, а выход блока 28 через К 30 - к третьему в5соду С 17, выход которого подключен к входу Ф 4. Управляющий вход К 29 соединен с третьим входом С 18, выходы датчика 31 - с датчиками 6 и 7. В электроприводе с помощью У 19 и С 17 и 18 осуществляется переход от нерегулируемого режима работы к регулируемому. Регулирование частоты вращения, частоты скольжения, активной составляющей тока ротора производится по одному каналу, а регулирование реактивной мощности - по другому. Перевод электропривода в регулируемый режим осуществляется без бросков тока. Это обеспечивается за счет того, что до вступления в работу цепей регулирования частоты вращения и реактивного тока статора с помощью У 19 и С 17 и 18 осуществляется необходимая ориентация вектора выходного тока РИ 2 относительно вектора ЭДС ротора и запоминается частота скольжения АД 1. В злектроприводе возможны повторные автоматические включения электропривода в -регулируемьш режим за счет обеспечения синхронизации системы на частотах вращения двигателя, выше синхронной частоты, -б ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
| Электропривод переменного тока | 1984 |
|
SU1251281A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1976 |
|
SU675567A1 |
| Устройство для управления машиной двойного питания | 1988 |
|
SU1594671A1 |

Изобретение относится к электротехнике и может быть использовано в горно-металлургической промьшшенности. Целью изобретения является повышение качества переходных процессов. Электропривод переменного тока содержит асинхронньш двигатель (АД) 1 с фазным ротором. В цепь статора АД 1 включены датчик 6 тока и датчик 7 напряжения. Выводы фазного ротора соединены с входами регулируемого источника (РИ) 2. В состав электро(Л vj го 4 СЛ СО 
Изобретение относится к электротехнике, а именно к электроприводу переменного тока на базе машины двойного питания с непосредственным преобразователем частоты в цепи ротора, и может быть использовано в механизмах, требующих высоких динамических свойств и повышенной надежности, например в горно-металлургической промышленности при регулировании числа оборотов ротора относительно синхронной скорости поля.
Целью изобретения является повышение качества переходных процессов
за счет уменьшения бросков тока при переходе от нерегулируемого к регулируемому режиму работы.
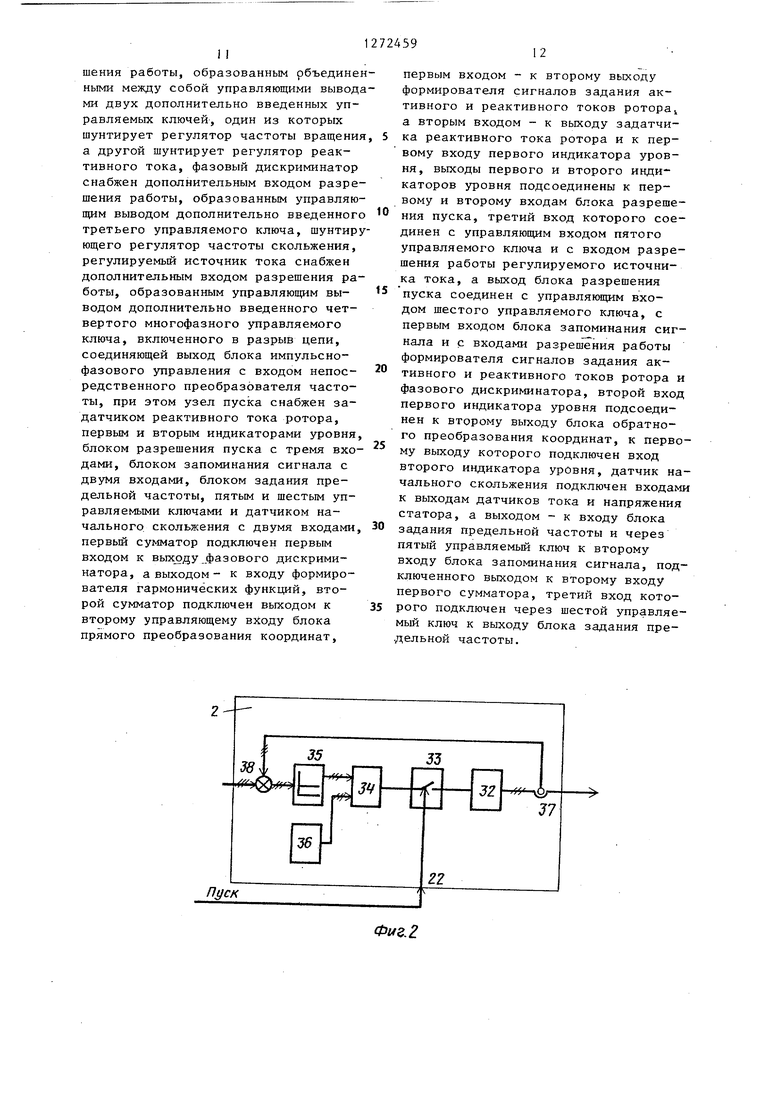
На фиг. 1 представлена функциональная схема электропривода переменного тока; на фиг. 2 - функциональная схема регулируемого источника тока; -на фиг. 3 - схема фазового дискриминатора; на фиг. 4 - схема формирователя сигналов задания активного и реактивного токов ротора; на фиг. -5 - схема датчика начального скольжения; на фиг. 6 - схема блока разрешения пуска. Электропривод переменного тока содержит асинхронный электродвигатель 1 (фиг. 1) с фазным ротором, подключенным к выходам регулируемого источника 2 тока, блок 3 прямого преобразования координат, подключенный выходами к управляющим входам ре гулируемого источника 2 тока, формирователь 4 гармонических функций, подключенный выходами к опорным входам блока 3 прямого преобразования координат, блок 5 обратного преобразования координат, подключенный входами к выходам датчиков 6 и 7 соотве ственно тока и напряжения статора, формирователь 8 сигналов задания активного и реактивного токов ротора с четырьмя входами 9-12, фазовый дискриминатор 13 с тремя входами 14-16. Первый 14 и второй 15 входы фазового дискриминатора 13 подключены к одноименным выходам блока 5 обратного преобразования координат, а третий вход 16 объединен с первым управляющим входом блока 3 прямого преобразо вания координат и подключен к первому входу формирователя 8 сигналов задания активного и реактивного токов ротора, первые два входа 9 и 10 которого подключены соответственно к выходам датчиков 6 и 7 соответственно тока и напряжения статора, тре тий вход 11 - к одноименному- выходу блока 5 обратного преобразования координат, а четвертый вход 12 объеди ней с входом формирователя 4 гармонических функций. В электропривод переменного тока введены первый 17 и второй 18 сумматоры, и узел 19 пуска. Формирователь 8 сигналов задания активного и реактивного токов ротора, фазовый диск риминатор 13 и регулируемый источник тока снабжены дополнительными входами 20, 21 и 22 разрешения работы соответственно. Узел 19 пуска снабжен задатчиком 23реактивного тока ротора, первым 24и вторым 25 индикаторами уровня, блоком 26 разрешения пуска с тремя входами, блоком 27 запоминания сигнала с двумя входами,,блоком 28 задания предельной частоты, управляемыми ключами 29 и 30 и датчиком 31 начального скольжения с двумя входами. Первый сумматор 17 подключен первым входом к выходу фазового дискриминатора 13, а выходом - к входу формирователя 4 гармонических функций. Второй сумматор 18 подключен выходом к второму управляющему входу блока 3 прямого преобразования координат, первым входом - к второму выходу формирователя 8 сигналов задания активного и реактивного токов ротора, а вторым входом - к выходу задатчика 23 реактивного тока ротора и к первому входу первого индикатора 24 уровня. Выходы первого 24 и второго 25 индикаторов уровня подсоединены к первому и второму входам блока 26 разрешения пуска, третий вход которого соединен с управляющим входом управляемого ключа 29 и с входом 22 разрешения работы регулируемого источника 2 тока. Выход блока 26 разрешения пуска соединен с управляющим входом управляемого ключа 30, с первым входом блока 27 запоминания сигнала и с входами 20 и 21 разрешения работы формирователя 8 сигналов задания активного и реактивного токов ротора и фазового дискриминатора 13. Второй вход первого индикатора 24 уровня подсоединен к второму выходу блока 5 обратного преобразования координат, к первому выходу которого подключен вход второго индикатора 25 уровня. Датчик 31 начального скольжения подключен входами к выходам датчиков 6 и 7 тока и напряжения статора, а выходом - к входу блока 28 задания предельной частоты и через управляемый ключ 29 к второму входу блока 27 запоминания сигнала, - подключенного выходом к второму входу первого сумматора 17, третий вход которого подключен через управляемый ключ 30 к выходу блока 28 задания предельной частоты. Регулируемый источник 2 тока содержит непосредственный преобразователь 32 частоты (фиг. 2), вход которого через многофазный управляемый ключ 33 подключен к выходу блока 34 импульсно-фазового управления, соединенного входами с выходом регулятора 35 фазньгх токов и блока 36 компенсации. На выходе непосредственного преобразователя 32-частоты установлен датчик 37 тока ротора, подключенный к одному из входов сумматора 38, выход которого соединен С входом регулятора 35 фазных токов, а другой вход образует управляющий вход регулируемого источника 2 тока, Управляющий вход управляемого ключа 33 образует вход 22 разрешения работы регулируемого источника 2 тока. Фазовый дискриминатор 13 содержит последовательно соединенные сумматор 39 (фиг. 3), блок АО деления и регулятор 41 частоты скольжения, зашунтированньш управляемым ключом 42. Входы сумматора 30, вход делителя блока 40 деления и управляющий вход управляемого ключа 42 образуют соответственно входы 14, 16, 15 и 24 фазового дискриминатора 13. Формирователь 8 сигналов задания активного и реактивного токов ротора содержит блок 43 (фиг. 4) вычисления потокосцепления статора, сумматоры 44 и 45, регулятор 46 частоты вращения, регулятор 47 реактивного тока, блок 48 деления и управляемые ключи 49 и 50, первый из которых шунтирует регулятор 46 частоты вращения, а вто рой - регулятор 47 реактивного тока. Выход сумматора 44 подключен к входу регулятора 46 частоты вращения, соединенного выходом с входом делимого блока 48 деления, вход делителя которого подключен к выходу блока 43 вычисления потокосцепления статора. Выход сумматора 45 подключен к входу регулятора 47 реактивного тока, выход которого и вход блока 48 деления образуют вькоды формирователя 8 сигналов задания активного и реактивного токов ротора. Входы блока 43 вычисления потокосцепления статора, выходы сумматоров 44 и 43 и управляю щий вход управляемого ключа 50 образуют соответственно входы 9, 10, 12, 11 и 20 формирователя 8 сигналов задания активного реактивного токов ротора. Датчик 31 начального скольжения содержит блок 51 (фиг. 5) вычисления потокосцепления статора, блок 52 вы числения активного тока и блок 53 деления, вход делимого которого подключен к выходу блока 52 вычисления активного тока, а вход делителя к выходу блока 51 вычисления потокосцепления статора. Блок 26 разрешения пуска содержит элемент И 54 (фиг. 6), инвертор 55 и. триггер 56, Входы которого подклюены к выходам элемента И 54 и инверора 55. Электропривод переменного тока раотает следующим образом. После запуска и разгона электровигателя 1 по одному из известных пособов, применяемых для машин двойого питания, обмотки ротора питаютя токами от регулируемого источниа 2 тока. Переход от нерегулируемоо к регулируемому режиму работы существляется с помощью узла 19 уска (фиг. 1) и сумматоров 17 и 18. егулятор 35 фазных токов (фиг. 2) беспечивает соответствие фазных оков ротора сигналам задания, постуающим с выхода блока 3 прямого пребразования координат, благодаря ольшому коэффициенту усиления в онтурах регулирования. При этом неосредственный преобразователь 32 астоты переходит в режим источника тока. На управляющие входы блока 3 прямого преобразования координат поступают сигналы ip, i. задания реактивного и активного токов ротора, а на опорные входы - гармонические сигналы sinpt, cospt (р- частота скольжения) с выходов фop fflpoвaтеля 4 гармонических функций. Сигнал задания i активного тока ротора сравнивается с сигналом обратной связи на входах сумматора 39 (фиг. 3), а результат сравнения используется в качестве делимого в блоке 40 деления, делителем для которого является сигнал, пропорциональный реактивной составляющей тока ротора Ipp. Сигналы и р.рот.- формируются соответствующих выходах блока 5 обратного преобразования координат. Выходной сигнал блока 40 деления пропорционален углу рассогласования между вектором тока ротора и его заданием. Этот сигнал поступает на вход регулятора 41 частоты скольжения, выходной сигнал которого определяет частоту скольжения р . Сигнал р используется, кроме того, в качестве сигнала обратной связи в регуляторе 46 частоты вращения (фиг. 4). В электроприводе переменного тока регулирование скорости вращения, частоты скольжения, активной составляющей тока ротора производится по одному каналу управления, а регулирование реактивной мощности - по друтому, благодаря чему обеспечиваются высокие динамические свойства электропривода. Благодаря использованию в электро приводе узла 19 пуска и сумматоров 17 и 18 обеспечивается перевод электропривода в регулируемый режим работы с качественным переходным процессом без бросков тока. Это достигается тем, что до всту ления в работу цепей регулирования частоты вращения электропривода и реактивного тока статора с помощью узла 19 пуска и сумматоров 17 и 18 осуществляется необходимая ориентация вектора выходного тока источника 2 регулируемого тока относительн вектора ЭДС ротора и запоминается частота скольжения двигателя. По сигналу перевода электропривода в регулируемый режим работы (Пуск) источник 2 регулируемого тока подключается к ротору электродвигателя 1 и из него в ротор начинает поступать ток, имеющий предель но возможную для источника 2 регулируемого тока частоту. При этом , формирователь 8 сигналов задания активного и реактивного токов ротор в работе еще не участвует, его выхо ные сигналы равны нулю, а величина тока ротора задается сигналом, пост , пающим из задатчика.13 реактивного тока ротора в канал задания реактив ного тока ротора. Направление враще ния вектора выходного тока источника 2 регулируемого тока задается противоположным направлению вращени вектора ЭДС ротора. Этим исключаетс затягивание процесса ориентации век тора тока относительно вектора ЭДС ротора в случае, когда значение час тоты скольжения оказывается близким к частоте выходного тока источника регулируемого тока. В результате фаза вектора тока относительно вектора ЭДС, имеющая случайное, значени в момент подключения источника 2 ре гулируемого тока к ротору, изменяет ся с суммарной скоростью cJ ЭДС и uJ тока. Такой режим обеспечивается до мо мента достилсения необходимой ориентации вектора тока относительно век тора ЭДС. Поскольку весь ток задает
ся по каналу задания реактивной составляющей тока ротора, этот момент наступит, когда ток ротора станет
ствующий нулевому значению активного тока двигателя, а на первый вход индикатора 24 уровня поступает сигчисто реактивным и нужного знака. Начиная с указанного момента вступают в работу цепи регулрфования частоты вращения электропривода и реактивного тока статора двигателя, а частота выходного тока задается выходными сигналами фазового дискриминатора 13 и блока 27 запоминания сигнала. Аналоговый сигнал, задающий частоту выходного тока источника 2 на интервале времени осуществления необходимой ориентации вектора тока относительно вектора ЭДС ротора, поступает на вход формирователя 4 гармонических функций через сумматор 17 и управляемый ключ 30 с выхода блока 28 задания предельной частоты. Величина его постоянная, не зависящая от частоты вращения двигателя, а полярность определяется тем, выше или ниже синхронной частота вращения в момент вступления в работу источника 2 регулируемого тока. И в том, и в другом -случае полярностью данного сигнала задается направление вращения вектора тока, противоположное направлению вращения вектора ЭДС ротора. Выходные сигналы фазового дискриминатора 13 и блока 27 запоминания сигналов в это время равны нулю. Возможность синхронизации системы на частотах вращения двигателя выше синхронной частоты позволяет осуществлять повторные автоматические включения электропривода в регулируемый режим работы без ощутимых просадок частоты вращения электропривода. Величина выходного тока источника 2 регулируемого тока определяется на указанном интервале времени величиной постоянного сигнала, поступающего на вход блока 3 прямого преобразования координат через сумматор 18 с выхода задатчика 23 реактивного тока ротора. Выходные сигнал формирователя 8 в это время равны нулю. Достижение необходимой ориентации вектора тока относительно вектора ЭДС фиксируется индикаторами 24 и 25 уровня. Когда ток ротора станет чисто реактивным и нужного знака, на вход индикатора 25- уровня поступает нулевой сигнал, соответнал реактивного тока ротора, равный по величине сигналу задания реактивного тока ротора., поступающему на второй вход индикатора 24 уровня с выхода эадатчика 23 реактивного тока ротора. При этом с выходов индикаторов 24 и 25 уровня на первьй и второ входы блока 26 разрешения пуска поступают сигналы, которые при наличии сигнала Пуск на его третьем входе приводят к появлению на выходе сигнала разрешения работы системы регулирования частоты вращения электропривода и реактивного тока статора .электродвигателя. По этому сигналу вступают в работу фазовьй дискримина тор 13 и формирователь 8 сигналов задания активного и реактивного токов ротора, появляется сигнал на выходе блока 27 запоминания сигналов и размыкается управляемый ключ 30. В результате сигнал с выхода блока 2 задания предельной частоты прекращает поступать на вход сумматора 17, а выходная частота источника 2 регулируемого тока определяется суммой выходных сигналов фазового дискриминатора 13 и блока 27 запоминания сигналов. С выхода блока 27 поступает сигнал, соответствующий частоте скольжения, запомнившийся в момент размыкания управляемого ключа 29. .Данный сигнал постепенно спадает до нуля, а необходимое значение выходно частоты источника 2 регулируемого т ка обеспечивается выходным сигналом вступившего в работу фазового дискриминатора 13. Величина составляющей тока ротора после вступления в рабо ,ту формирователя 8 задается суммой выходного сигнала задатчика 23 реактивного тока ротора и сигнала с соответствующего выхода формирова теля 8, а величина активной составляющей тока ротора задается сигналом с соответствующего выхода форми рователя 8. При этом начинается про цесс регулирования частоты вращения и реактивного тока статора электро двигателя. Таким образом, введение в электр привод узла пуска и двух сумматоров а также вьшолнение формирователя сигналов задания активного и реакти ного токов ротора, фазового дискриминатора и регулируемого источник тока с дополнительными входами разрешения работы обеспечивают необхоимую ориентацию вектора тока относительно вектора ЭДС при переходе от нерегулируемого к регулируемому режиму работы, благодаря чему уменьшаются броски тока и повьшгается качество переходных.процессов. Формула изобретения Электропривод переменного тока, содержащий асинхронный электродвигатель с фазным ротором, подключенным к выходам регулируемого источника тока, выполненного на основе непосредственного преобразователя час тоты с блоком импульсно-фазового управления на входе, блок прямого преобразования координат, подключенный выходом к управляющему входу регулируемого источника тока, формирователь гармонических функций, подключенный выходами к опорным входам блока прямого преобразования координат, блок обратного преобразования координат, подключенный входами к выходам датчиков тока и напряжёг ния статора, формирователь сигналов задания активного и реактивного токов ротора с четьгрьмя входами, выполненный с регулятором частоты вращения и с регулятором реактивного тока, и фазовый дискриминатор с тремя входами, вьтолненный с регулятором частоты скольжения, при этом первьй и второй входы фазового дискриминатора подключены к одноименным выходам блока обратного преобразования координат, а третий вход объединен с первым управляющим входом блока прямого преобразования координат и подключен к первому выходу формирователя сигналов задания активного и реактивного токов ротора, первые ;два входа которого подключены соответственно к выходам датчиков тока и напряжения статора, третий вход к одноименному выходу блока обратного п;реобразования координат, а четвертый вход объединен с входом формирователя гармонических функций, отличающийся тем, что, с целью повышения качества переходных процессов за счет уменьшения бросков тока при переходе от нерегулируемого к регулируемому режиму работы, введены первый и второй сумматоры и узел пуска, -формирователь сигналов задания активного и реактивного токов ротора снабжен дополнительным входом разрешения работы, образованным объедине ными между собой управляющими вывод ми двух дополнительно введенных управляемых ключей, один из которых шунтирует регулятор частоты вращени а другой шунтирует регулятор реактивного тока, фазовый дискриминатор снабжен дополнительным входом разре шения работы, образованным управляю щим выводом дополнительно введенног третьего управляемого ключа, шунтир ющего регулятор частоты скольжения, регулируемый источник тока снабжен дополнительным входом разрешения ра боты, образованным управляющим выводом дополнительно введенного четвертого многофазного управляемого ключа, включенного в разрыв цепи, соединяющей выход блока импульснофазового управления с входом непосредственного преобразователя частоты, при этом узел пуска снабжен задатчиком реактивного тока ротора, первым и вторым индикаторами уровня блоком разрешения пуска с тремя вхо дами, блоком запоминания сигнала с двумя входами, блоком задания предельной частоты, пятым и шестым управляемыми ключами и датчиком начального скольжения с двумя входами первый сумматор подключен первым входом к выходу фазового дискриминатора, а выходом - к входу формирователя гармонических функций, второй сумматор подключен выходом к второму управляющему входу блока прямого преобразования координат. первым входом - к второму выходу формирователя сигналов задания активного и реактивного токов ротораi а вторым входом - к выходу задатчика реактивного тока ротора и к первому входу первого индикатора уровня, выходы первого и второго индикаторов уровня подсоединены к первому и второму входам блока разрешения пуска, третий вход которого соединен с управляющим входом пятого управляемого ключа и с входом разрешения работы регулируемого источника тока, а выход блока разрешения пуска соединен с управляющим входом шестого управляемого ключа, с первым входом блока запоминания сигнала и с входами разрешения работы формирователя сигналов задания активного и реактивного токов ротора и фазового дискриминатора, второй вход первого индикатора уровня подсоединен к второму выходу блока обратного преобразования координат, к первому выходу которого подключен вход второго индикатора уровня, датчик начального скольжения подключен входами к выходам датчиков тока и напряжения статора, а выходом - к входу блока задания предельной частоты и через пятый управляемый ключ к второму входу блока запоминания сигнала, подключенного выходом к второму входу первого сумматора, третий вход которого подключен через шестой управляемый ключ к выходу блока задания преельной частоты.
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
