Изобретение относится к устройствам для уплотнения грунта, бетона, а также для забивки свай и шпунта.
Цель изобретения - повышение эффективности работы, за счет обеспе-- чения самонастройки устройства.
На фиг,Г изображена конструктивная схема предложенной вибротрамбовки j на фиг.2 - возможные траектории движения корпуса относительно шабота.
Вибротрамбовка содержит корпус 1 с расположенным в нем приводом с
валом 2, маховик 3 и кривошипно-ша- 15 кривошипа находится в пределах тунный механизм 4. На свободном кон- i /Г , то происходит отрыв це шатуна 5 шарнирно установлен поршень-ударник 6, который имеет возпоршня-ударника 6 от шабота 8 и устанавливается устойчивый одноудар- ный режим трамбования,соответствующий
ляющего полого цилиндра ,7, прикреп- 20 траектории 2, приведенной на фиг.2.
ленного к нижней части корпуса, при- Если в момент падения поршня-ударника 6 угол поворота кривошипа находится в пределах / 5 о 3/2/у то приращения энергии удара не происхо- 25 дит и при достижении « Ъ/2 Т/ после дополнительного удара нижним торцом направляющего полого цилиндра 7 по шаботу 8 корпус 1 останавливается до момента, когда кривошип вновь
можность перемещаться внутри направчем высота цилиндра h выбрана в соответствии с соотношением:
h 1 + b - S,
где 1 - длина шатуна;
Ъ - высота поршня-ударника;
S - расстояние от центра вращения вала 2 до верхнего осно- 30 займет положение, соответствующее
/I /2. После этого происходит, очередной удар с заданной максимальной интенсивностью, что соответствует траектории 3, приведенной на 35 2.
Формула изобретения
вания направляющего цилиндра 7.
Корпус 1 вместе с установленными на нем элементами имеет возможность перемещаться относительно шабота 8 по закрепленным на нем направляющим 9.
Вибротрамбовка работает следующим образом.Вибротрамбовка, содержащая корПри включении привода кривошипно- 40 пус, выполненный с вертикальными на- шАтунный механизм 4 вибротрамбовки правляющими и валом, на котором рас- преобразует вращательное движение ва- положен маховик с кривошипно-шатунла 2 в возвратно-поступательное движение корпуса 1 относительно шабота 8. При этом, если значения угла поворота кривошипа 4 относительно .его верхнего вертикального положения находятся в пределах: О . о i. Jfl i и 3/2 77 о i. , то поршень-ударник 6 не касается шабота 8 и корпус 1 неподвижен. При достижении кривошипом фазового угла о 77/2 поршень-ударник 6 наносит удар по шаботу 8 и корпус 1 вместе с приводом, кривошип- но-шатунным механизмом и поршнем-- ударником 6 подскакивает относительно шабота на определенную высоту, зависящую от величины радиуса кривошипа г, частоты вращения вала UJ
и физико-механического состояния грунта. В зависимости от высоты подскока падение корпуса 1 и нанесение им удара по шаботу 8 возможно или нижним торцом направляющего полого цилиндра 7, что будет иметь место при О с (f/2 и 3/2 7/ « i 2 /Г и соответствует траектории 1., приведенной на фиг.2, или поршнем-ударником 6 - при . 4 3/2/. При ударе поршнем-ударником 6 по шаботу 8 возможны два режима трамбования. Если в момент очередного падения фазовый угол «
/I /2. После этого происходит, очередной удар с заданной максимальной интенсивностью, что соответствует траектории 3, приведенной на 2.
Формула изобретения
ным механизмом,имеющим поршень-ударник, шабот, привод, отличаю- щ а я с я тем, что, с целью noBbmie- ния эффективности работы за-счет обеспечения Самонастройки устройства, она снабжена прикрепленным к нижней части корпуса направляющим полым цилиндром, внутри которого расположен поршень-ударник, причем высоту цилиндра h определяют по формуле
- h 1 + b - S,
где 1 - длина шатуна;
b - высота поршня ударника;
S - расстояние от центра вращения вала до верхнего основания направляющего цилиндра.
Щ2 2
фи&.2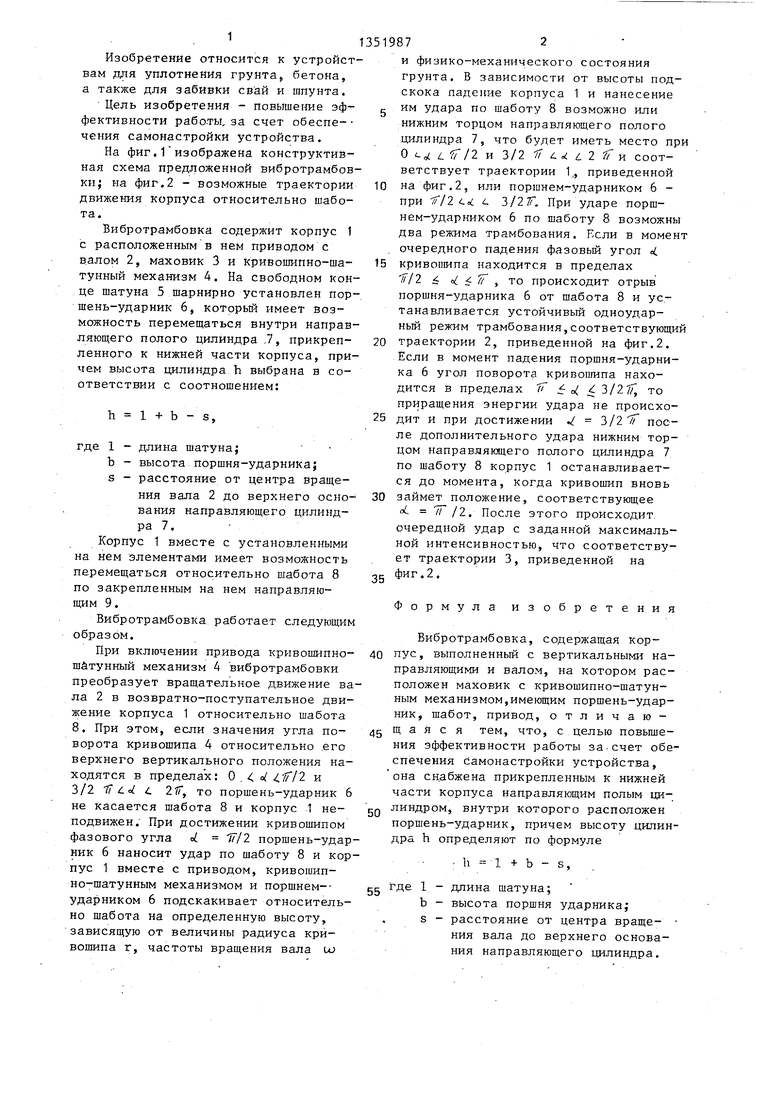
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибротрамбовка | 1986 |
|
SU1418380A1 |
| Вибротрамбовка | 1982 |
|
SU1020479A1 |
| Вибротрамбовка | 1983 |
|
SU1271921A1 |
| Вибромолот для погружения свай,шпуНТА и ТОМу пОдОбНыХ элЕМЕНТОВ | 1978 |
|
SU808598A2 |
| Вибротрамбовка | 1980 |
|
SU878855A1 |
| Вибротрамбовка | 1984 |
|
SU1187501A1 |
| Свайный дизель-молот | 1986 |
|
SU1366599A1 |
| Вибромолот | 1977 |
|
SU631597A1 |
| Вибротрамбовка | 1981 |
|
SU974801A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
Изобретение относится к устройствам для уплотнения грунта, бетона, а также для забивки свай, шпунта и позволяет повысить эффективность работы за счет обеспечения самонастройки устройства. Вибротрамбовка содержит корпус 1 с расположенным в нем приводом с валом 2, маховик-3 и кри вопшпно-шатунный механизм 4. На свободном конце шатуна 5 установлен поршень-ударник 6, перемещающийся внутри полого направляющего цилиндра 7, прикрепленного к нижней части корпуса 1. Высота цилиндра 7 определяется по формуле h 1 + b - S, где 1 - длина шатуна; b - высота поршня-ударника; s - расстояние от центра вращения вала 2 до верхнего основания направляющего цилиндра 7, Корпус 1 имеет возможность перемещаться относительно шабота 8 по вертикальным направляющим 9. 2 ил. д i (Я со ел ;о 00 фиг.1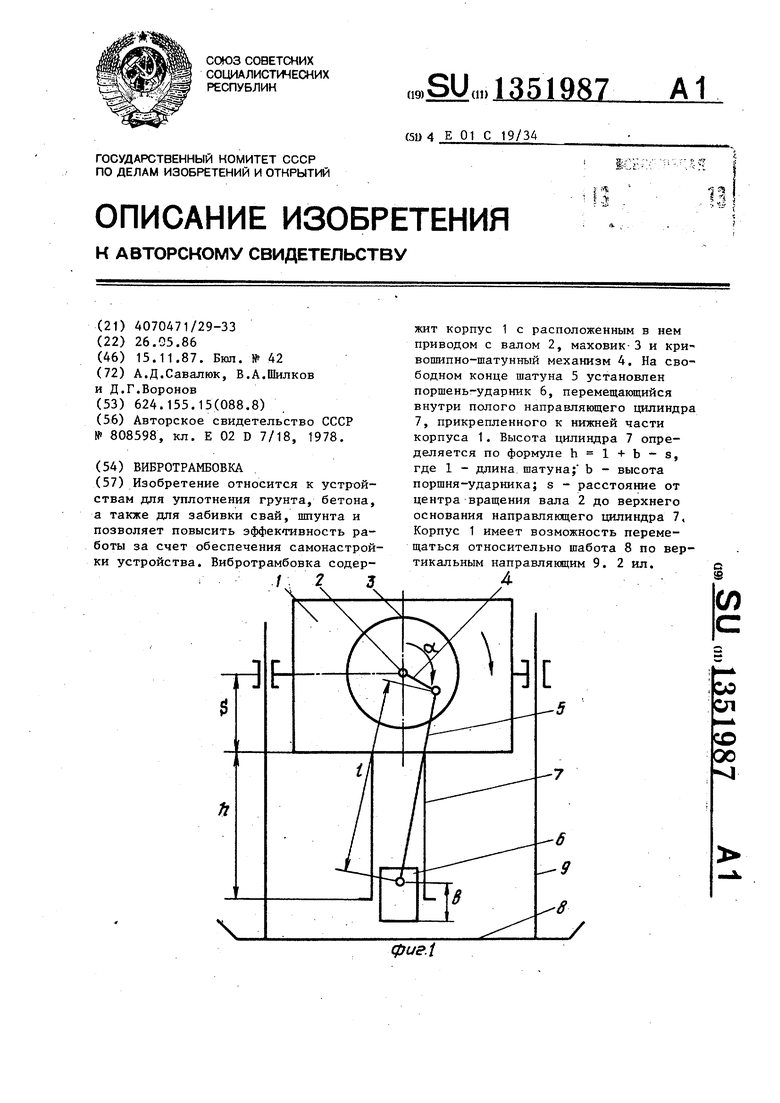
| Вибромолот для погружения свай,шпуНТА и ТОМу пОдОбНыХ элЕМЕНТОВ | 1978 |
|
SU808598A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
