сх
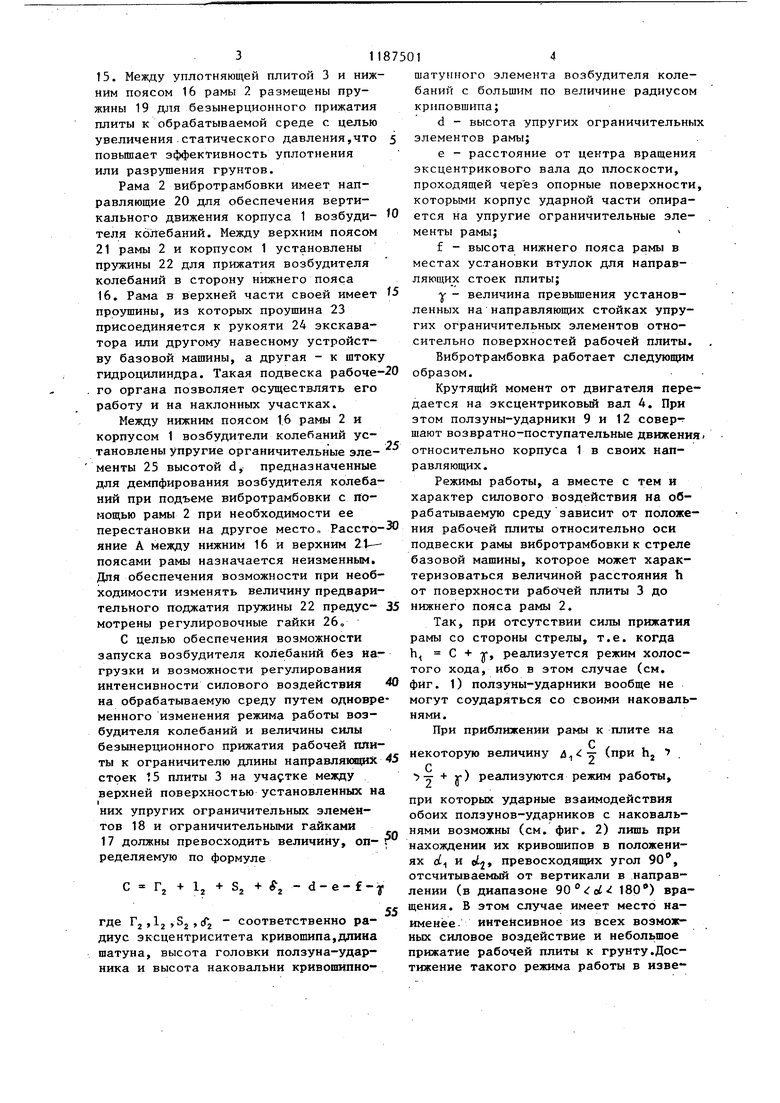
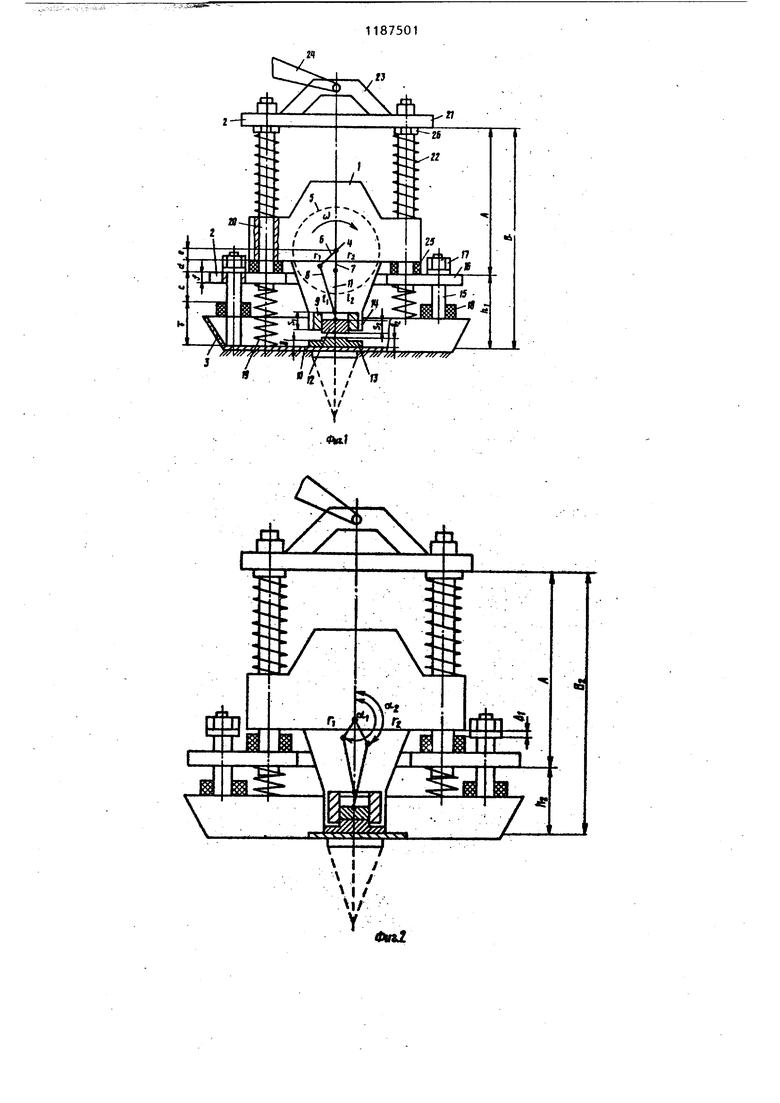
О1 Изобретение относится к строительной технике и предназначено преимущественно для уплотнения грунта в стесненных условиях строительства. Наиболее близким из известного является вибротрамбовка, содержащая имеющую наковальню уплотняющую рабочую плиту с направляющими стойками, соединенный с инерционной массой кривошипно-шатунный привод ударного механизма со смещенными по фазе равновеликими кривощипами, соединенными с основным и дополнительным щатунами, на свободных концах которых закреплены ползуны-ударники, один из которых охватывает другой. Недостатками такой конструкции является то, что в ней не в полной мере использованы условия, снижающие энергоемкость процесса, а также не полностью использованы потенциальные возможности механизмов рассматриваемого принципа действия. В частности, не предусмотрены возможность осуществления запуска возбудителя колебаний 25 на холостом ходу и возможность автоматического регулирования интенсивно ти воздействия рабочего органа на грунт по мере уплотнения последнего без необходимости применения специального автоматического регулятора. Целью изобретение является повышение эффективности уплотнения грунта, снижение энергоемкости процесса, улучшение эксплуатационных показателей и расширение диапазона рабочих , режимов вибротрамбовки. Указанная цель достигается тем,чт витротрамбовка, содержащая имеющую наковальню уплотняющую плиту с направляющими стойками, соединенный с . инерционной массой кривощипно-шатунный привод ударного механизма со сме щенными по фазе равновеликими кривошипами, соединенными с основным и до полнйтельным шатунами, на свободных концах которых закреплены ползуныударники, один из которых охватьшает другой, снабжена рамой, смонтированной на направляющих стойках плиты и подпружиненной в нижней части относи тельно плиты, а в верхней части - относительно инерционной массы, и упругими ограничительными элементами. размещенными мезкду нижним поясом рамы и плитой и между нижним поясом ра мы и инерционной массой,.причем инер ционная масса смонтирована на раме с возможностью ее перемещения относи111 тельно вертикально расположенных направляющих. На фиг. 1 изображен общий вид вибротрамбовки; на фиг. 2 - положение с опущенным центральным ползуном-ударником; на фиг. 3 - то же, с двумя опущенными ползунами-ударниками; на фиг. 4 - то же, с опущенным кольцевым ползуном-ударником . Вибротрамбовка навещивается на рукоять гидравлического экскаватора взамен ковща или на специальное навесное устройство к любому базовому тягачу и может быть иметь гидравлический, электрический или механический привод. Она включает в себя (см. фиг.1) кривощипно-шатунный возбудитель колебаний, размещенный в инерционной массе (корпус 1) раму 2 и рабочую плиту 3. Кривощипно-шатунный возбудитель колебаний содержит эксцентриковый (коленчатый) вал 4 с маховиком 5, выполненный с равновеликими кривошипами 6 и 7, сдвинутыми по фазе на угол V , Кривощип 6 с эксцентриситетом г через шатун 8 длиной 1 соединен с ползуном-ударником 9 с высотой головки S, взаимодействующим с установленной на шште 3 наковальней 10, именицей высоту сГ. Кривошип 7 с эксцентриситетом г через шатун 11 длиной 1 соединен с ползуномударником 12 с высотой головки Sj , взаимодействуювчим с наковальней 13, имекмцей высоту Ударник 9 охватывает ударник 12 и является направляющей для последнего. Сам ползунударник 9 совершает возвратно- поступательные движения в специальной направляющей 14, жестко связанной с корпусом 1. Уплотняющая плита 3 снабжена на-. Равляющими стойками 15 для обеспече-i ния ее вертикального движения относительно рамы 2. Величина взаимного перемещения плиты 3 и рамы 2 ограничивается расстоянием С между верхней поверхностью нижнего пояса 16 ра- мы 2 и установленными на концам направляющих стоек ограничительными гайками 17. Минимальное расстояние между нижней поверхностью нижнего ° рамы 2 и плитой 3 определяется величиной превышения .-у относительно поверхности плиты 3 упругих ограничительных элементов 18 установленных на направляющих стойках 15.Между уплотняющей плитой 3 и ниж ним поясом 16 рамы 2 размещены пружины 19 для безынерционного прижатия плиты к обрабатываемой среде с целью увеличения.статического давления,что повышает эффективность уплотнения или разрушения грунтов. Рама 2 вибротрамбовки имеет направляющие 20 для обеспечения вертикального движения корпуса 1 возбудителя колебаний. Между верхним поясом 21 рамы 2 и корпусом 1 установлены пружины 22 для прижатия возбудителя колебаний в сторону нижнего пояса 16,Рама н верхней части своей имеет проушины, из которых проушина 23 присоединяется к рукояти 24 экскаватора или другому навесному устройству базовой машины, а другая - к шток гидроцилиндра. Такая подвеска рабоче го органа позволяет осуществлять его работу и на наклонных участках. Между нижним поясом 1,6 рамы 2 и корпусом 1 возбудители колебаний установлены упругие органичительные элементы 25 высотой d, предназначенные для демпфирования возбудителя колеба ний при подъеме вибротрамбовки с помощью рамы 2 при необходимости ее перестановки на другое место„ Рассто яние А между нижним 16 и верхним 21- поясами рамы назначается неизменным. Для обеспечения возможности при необ ходимости изменять величину предвари тельного поджатия пружины 22 предусмотрены регулировочные гайки 26,, С целью обеспечения возможности запуска возбудителя колебаний без на грузки и возможности регулирования интенсивности силового воздействия на обрабатываемую среду путем одновр менного изменения режима работы возбудителя колебаний и величины силы безынерционного прижатия рабочей пЯнты к ограничителю длины направлякяцих стоек t5 плиты 3 на участке между верхней поверхностью установленных н I них упругих ограничительных элементов 18 и ограничительными гайками 17 должны превосходить величину, определяемую по формуле Г, + I, + S, + , - d-e-f-y где r2,l2,Sj,(r2 - соответственно радиус эксцентриситета кривошипа,длина шатуна, высота головки ползуна-ударника и высота наковальни кривошипношатунного элемента возбудителя колебаний с большим по величине радиусом крнповшипа; d - высота упругих ограничительных элементов рамы; е - расстояние от центра вращения эксцентрикового вала до плоскости, проходящей через опорные поверхности, которыми корпус ударной части опирается на упругие ограничительные элементы рамы;V f - высота нижнего пояса рамы в местах установки втулок для направ- ляющи х стоек плиты; у - величина превьш ения установленных на направляющих стойках упругих ограничительных элементов относительно поверхностей рабочей плиты. Вибротрамбовка работает следующим образом. Крутящий момент от двигателя передается на эксцентриковый вал 4. При этом ползуны-ударники 9 и 12 совершают возвратно-поступательные движения относительно корпуса 1 в своих направляющих. Режимы работы, а вместе с тем и характер силового воздействия на обрабатываемую среду зависит от положения рабочей плиты относительно оси подвески рамы вибротрамбовки к стреле базовой машины, которое может характеризоваться величиной расстояния h от поверхности рабочей плиты 3 до нижнего пояса рамы 2. Так, при отсутствии силы прижатия рамы со стороны стрелы, т.е. когда h, С + , реализуется режим холостого хода, ибо в этом случае (см, фиг. 1) ползуны-ударники вообще не могут соударяться со своими наковальнями. При приближении рамы к плите на (некоторую величину (при hj С + г) реализуются режим работы, при которых ударные взаимодействия обоих ползунов-ударников с наковальнями возможны (см, фиг, 2) лишь при ахождении их кривошипов в положених d и превосходящих угол 90, отсчитываемый от вертикали в направении (в диапазоне 90 rf 180) враения, В этом случае имеет место наменее, интенсивное из всех возможых силовое воздействие и небольшое рижатие рабочей плиты к грунту,Досижение такого режима работы в известных вибротрамбовках аналогичного действия вообще невозможно. Когда hj j ) (при прижатии рамы к пли те на величину л. возможны ударные взаимодействия ползунов-удар ников при положениях кривошипов под углом, близким к 90, при которых достигается режим наиболее сильных ударов. При этом силовое воздействие может длиться до поворота кривошипов до углового положения, равного 180, а величина силы прижатия плиты к грунту близка к половине от максимально возможной. В случаях, когда Ьд уСпри Д -С) начало ударных взаимодействий возмож но при нахождении, кривошипов (см, фиг.4) в крайнем верхнем положении т.е. при ( 0 О и 2- 0)- При этих условиях может быть обеспечена наибольшая длительность существования силового воздействия в каждом ударном цикле, поскольку ползуны-ударники могут находиться в контакте со своими ударниками при повороте кривошипов на угол 180 (от О до 180). Одновременно достигается максимально возможное статическое прижатие рабочей плиты к среде воздействия. Таким образом, выбротрамбовка поз воляет простым для реализации способом изменять режимы работы и регулировать интенсивность силового воздействия на обрабатываемый материал в соответствии с заданными технологическими требованиями. В частности, можно обеспечивать: автоматическое изменение интенсивности и длительности воздействия по мере уплотнения грунта. I .. При этом достигается максимальное по длительности и минимальное по уровню уплотнякидее воздействие, что является наиболее эффективным для начальной стадии уплотнения . В результате осадки грунта по мере его уплотнения рабочая плита постепенно начинает удаляться от рамы. Это приводит автоматически к изменению фазовых углов удара of и обоих ползунов-удар- НИКОВ в сторону приближения их значений к величине, близкой к 90,при которой наблюдаются наиболее сильные по уровню но менее продолжительные по длительности ударно-вибрационные воздействия,, что, как известно, и требуется обеспечивать в конечной стадии уплотнения. В результате значительно уменьшается энергоемкость процесса уплотнения до 11%), одновременно повьипается эффективность и качество уплотнения. Также. расширяет-, ся диапазон применения вибротрамбовки, что связано преждевсего с ее универсальностью с точки зрения возможности регулировать интенсивность воздействия в широком диапазоне зна- чений.
VVfti
г-

| название | год | авторы | номер документа |
|---|---|---|---|
| Вибротрамбовка | 1989 |
|
SU1615274A2 |
| Вибротрамбовка | 1983 |
|
SU1271921A1 |
| Вибротрамбовка | 1984 |
|
SU1192426A1 |
| Вибротрамбовка | 1981 |
|
SU974801A1 |
| Вибротрамбовка | 1980 |
|
SU878855A1 |
| Вибротрамбовка | 1982 |
|
SU1020479A1 |
| Вибротрамбовка | 1986 |
|
SU1418380A1 |
| Стенд для испытаний изделий на тряску | 1985 |
|
SU1352277A1 |
| Вибротрамбовка | 1982 |
|
SU1074941A2 |
| Самоходная вибротрамбовка для уплотнения стенок траншей | 1981 |
|
SU977544A1 |
ВИБРОТРАМБОВКА, содержащая шеющзпо наковальню уплотняющую плиту с направляющими стойками, соединенный с инерционной массой кривошипно-шатунный привод ударного механизма со смещенными по фазе разновеликими кривошипами, соединенными с основным и дополнительным шатунами, на свободных концах которых закреплены ползуны-ударники, один из которых охватывает другой, отличающаяся тем, что, с целью повышения эффективности уплотнения грунта, снижения энергоемкости процесса, улучшения эксплуатационных показателей и расширения диапазона . рабочих режимов, она снабжена рамой, смонтированной на направляющих стойках плиты и подпружиненной в нижней части относительно плиты, а в верхней части - относительно инерционной массы, и упругими ограничительными элементами размещенными между нижним поясом рамы и плитой и между нижг ним поясом рамы и инерционной массой, причем инерционная масса смонтирована на раме с возможностью ее перемещения относительно вертикально расположенных направляющих.
| Вибромолот для погружения свай,шпуНТА и ТОМу пОдОбНыХ элЕМЕНТОВ | 1978 |
|
SU808598A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
