/
/
о to
Y/// // /// /// ///,
сл
с
00
со
00
Изобретение относится к строительству, а именно к виброуплотняющим машинам, и может быть использовано при уплотнении грунта, бетона, а также для забивки свай и шпунта.
Цель изобретения - повышение эффективности и качества уплотнения грунта.
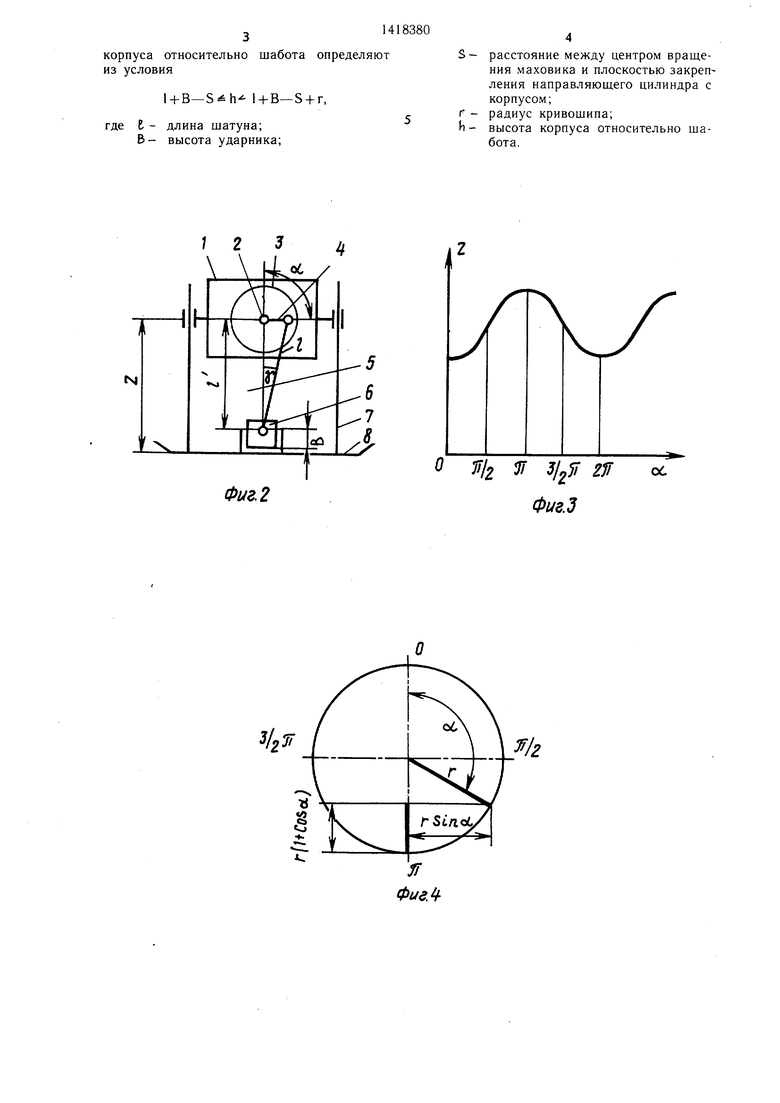
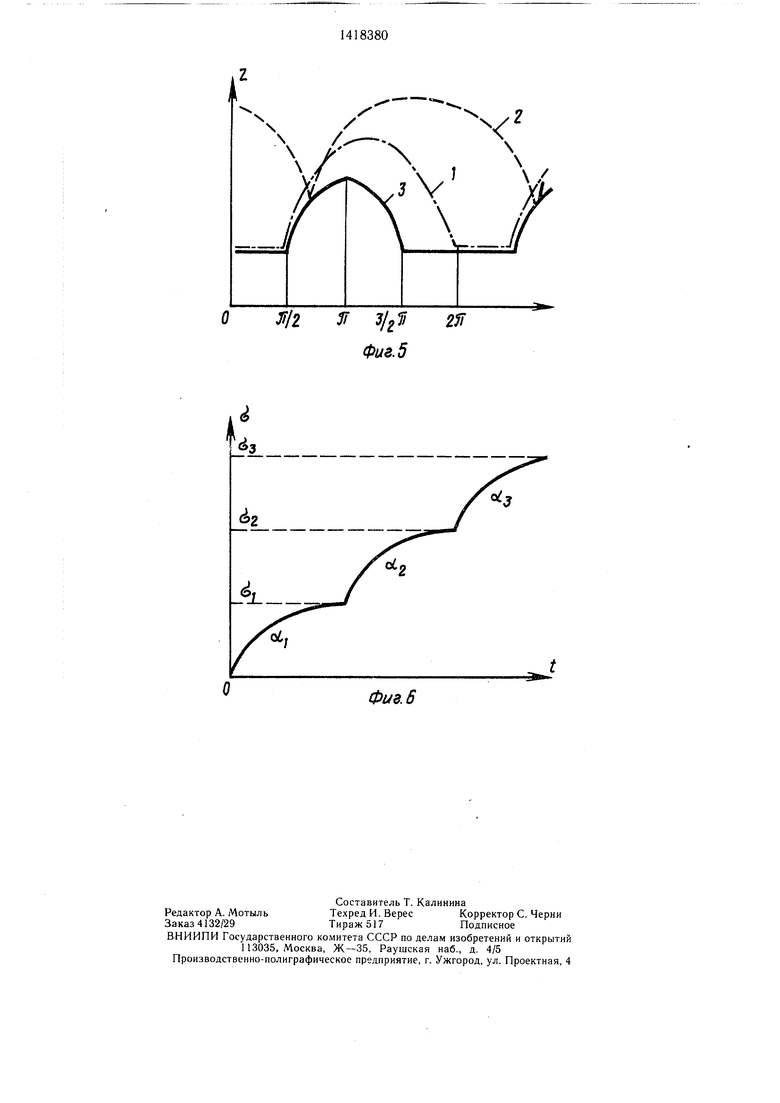
На фиг. 1 изображена кинематическая схема вибротрамбовки; на фиг. 2 - кинематическая схема, ударно-вибрационного механизма с кривошипно-шатунным возбудителем колебаний; на фиг. 3 - траектория движения корпуса относительно шабота при постоянном касании ударника шабота; на фиг. 4 - влияние изменения высоты цилиндра на фазовый угол удара ударника; на фиг. 5 - возможные траекторные движения Корпуса вибротрамбовки относительно шабота; на фиг. 6 - изменение напряжений (у в грунте в зависимости от величины угла /
Вибротрамбовка содержит шабот 1 с закрепленной на нем направляющей 2. По Чаправляюшей 2 перемешаются корпус 3 с приводом 4, маховиком 5 и кривошипно-шатунным механизмом 6, который снабжен шатунами 7 и ударником 8. Последний выполнен со сквозным отверстием и закреплен на свободных концах шатунов 7. В нижней части корпуса 3 закреплен направляющий цилиндр 9, охватываемый ударником 8. Полость цилиндра 9 заполнена жидкостью или газом. Цилиндр 9 снабжен поршнем 10 со штоком 11 и управляемым перепускным клапаном (не показан) для перепуска жидкости (газа) из бесштоковой полости цилиндра 9 в полость со штоком 11.
Высота корпуса 3 относительно шабота 1 определяется из условия
1+В-S h- l + B-S + r, где 2 - длина шатуна;
В - высота ударника; S - расстояние между центром вращения маховика и плоскостью закрепления направляющего цилиндра с корпусом;
Г- радиус кривошипа; Vi - высота корпуса относительно шабота.
Вибротрамбовка работает следующим образом.
При включении привода 4 кривошипно- шатунный механизм 6 вибротрамбовки преобразовывает его вращательное движение в возвратно-поступательное движение ударника 8. Если высота направляющего цилиндра 9 будет максимальной и равной h t + -fB-S + г, то ударник 8 при любом фазовом положении не будет касаться шабота 1, что позволит с минимальной затратой производить ее запуск. В зависимости от тре0
5
0
буемой интенсивности динамического воздействия, которая зависит от фазового положения сч кривошипно-шатунного механизма 6 в момент удара ударником 8, предварительно устанавливается соответствующая высота корпуса 3 путем перепуска жидкости (газа) из бесштоковой полости цилиндра 9 в полость со штоком 11. Максимальный ударный импульс будет при минимальной высоте корпуса 3 относительно шабота 1, равном Ь 1ч-В-S. При этом удар ударником 8 будет возможен в тот момент, когда фазовое положение будет равным S /2.
Фазовое положение оС кривошипно-шатунного механизма 6 в момент удара, от которого зависит заданная интенсивность динамического воздействия, определяется соотношением (фиг. 4)
A arccos(l-i-B-S-h)/rl.
После каждого удара корпус 3 относительно шабота 1 будет перемещаться на высоту, зависящую от радиуса кривошипно-шатунного механизма 6, его фазового положения в момент удара, частоты вращения, сопротивления грунта. В момент падения возможны два случая. Удар может быть нанесен или ударником 8, если
hxcl + B-S-г cos л,(1)
или направляющим цилиндром, если
h l-f-B-S-г cos.(2)
Если 9i/2;6d z, то будет совершаться устойчивый одноударный режим, что соответствует траектории 2 (фиг. 5). Если Sf -ed 3/25Г , то произойдет удар ударником 8 без превращения энергии, так как скорость ударника 8 направлена вверх. По достижении условия (2) после дополнительного удара направляющим цилиндром 9 корпус 3 остановится до того момента, когда фазовый угол вдовь займет положение, соответствующее условию (1), после чего произойдет очередной удар с заданной интенсивностью, что соответствует траектории 1 (фиг. 5).
5
0
G
Формула изобретения
Вибротрамбовка, содержащая имеющий возможность перемещения относительно шабота по закрепленным на нем направляющим корпус с приводом, маховиком и кривошипно-шатунным механизмом, на свободных концах шатунов которого шарнирно закреплен имеющий сквозное отверстие ударник, отличающаяся тем, что, с целью повышения эффективности и качества уплотнения грунта, она снабжена расположенным в отверстии ударника направляющим цилиндром, полость которого заполнена жидкостью или газом, и поршнем со штоком, соединенным с корпусом, причем высоту
корпуса относительно шабота определяют из условия
1-fB-S h- 1 + В-S + г,
где t - длина шатуна; В- высота ударника;
расстояние между центром вращения маховика и плоскостью закреп- Ленин направляюш,его цилиндра с корпусом;
радиус кривошипа;
высота корпуса относительно шабота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибротрамбовка | 1986 |
|
SU1351987A1 |
| Вибротрамбовка | 1982 |
|
SU1020479A1 |
| Вибротрамбовка | 1984 |
|
SU1187501A1 |
| Вибротрамбовка | 1983 |
|
SU1271921A1 |
| Вибротрамбовка | 1989 |
|
SU1615274A2 |
| Вибротрамбовка | 1980 |
|
SU878855A1 |
| Вибромолот для погружения свай,шпуНТА и ТОМу пОдОбНыХ элЕМЕНТОВ | 1978 |
|
SU808598A2 |
| Вибротрамбовка | 1984 |
|
SU1192426A1 |
| Вибротрамбовка | 1981 |
|
SU974801A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
Изобретение относится к виброуплот- няющим машинам и позволит повысить эффективность и качество уплотнения грунта. Вибротромбовка содержит шабот 1 с направляющей 2, корпус 3 с приводом 4, маховиком 5, кривошипно-шатунным механизмом 6. Механизм 6 снабжен шатунами 7 и ударником 8. В корпусе 3 закреплен нап- равляюш.ий цилиндр 9 с поршнем 10 и штоком 11. Высота корпуса 3 относительно шабота 1 определяется в зависимости от длины шатуна 7, высоты ударника 8, расстояния между центром вращения маховика 5 и плоскостью закрепления направляющего цилиндра 9 с корпусом 3 и радиуса кривошипа. 6 ил.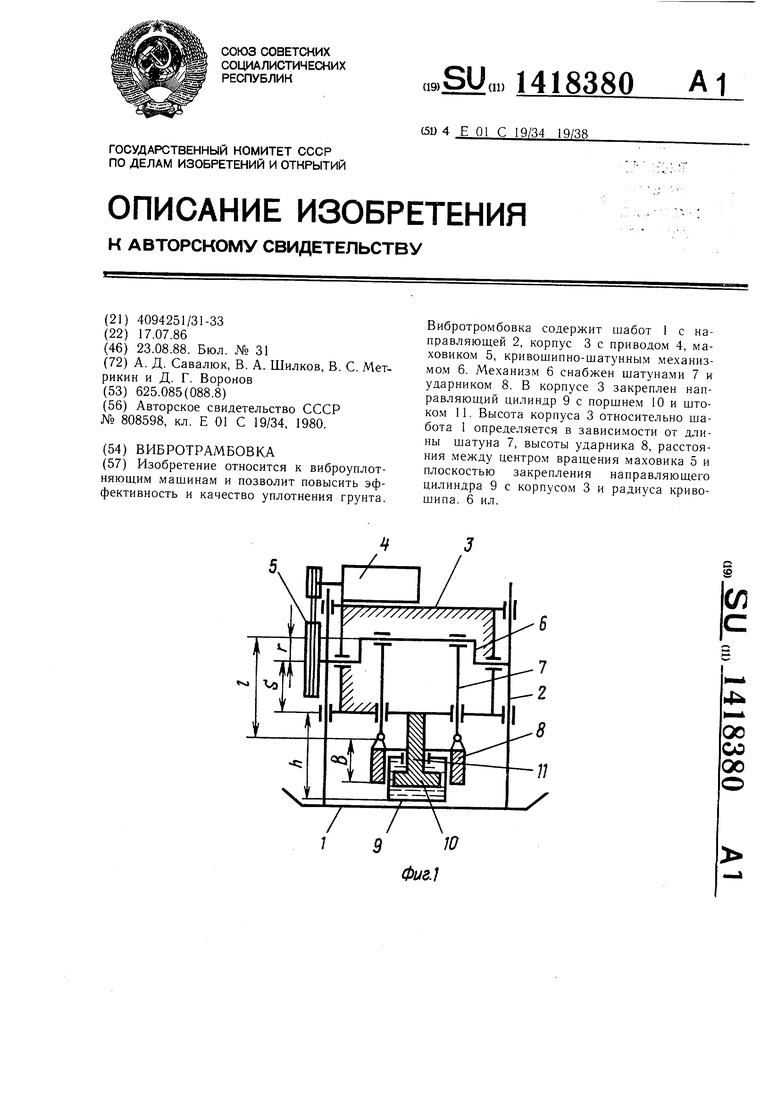
Фиг. 2
Г
О л/2 ЗГ 2 06 Фиг.З
rSincL/
Физ.
О yijZ 3i J/2 2 Фиг. 5
Фив. 6
| Вибромолот для погружения свай,шпуНТА и ТОМу пОдОбНыХ элЕМЕНТОВ | 1978 |
|
SU808598A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
