9, регистратор 12, введены кодовый элемент 2, блок 4 сравнения, индикатор 5, блок 8 регистров, регистр 10 и арифметическое устройство П. При перемещении объекта на выходе датчика 1 формируются сигналЬ. Число его оборотов просчитьшается с помощью кодового элемента 2, состоящего из двух групп фотодатчиков, расположенных перпендикулярно движению кодового элемента 2 и разнесенных на полов1йну шага продвижения кодового элемента. Выбор группы фотодатчиков, используемой для работы в определенный момент времени, осуществляется блоком 4 по результату сравнения значений кода с выхода блока 8 регистров и с выхода датчика 1 угла. Одновременно блок 4 осуществляет
1
Изобретение относится к автоматике и вычислительной технике и предназначено для изменения линейных или угловых перемещений.
.Цель изобретения - повьш1ение надежности преобразователя.
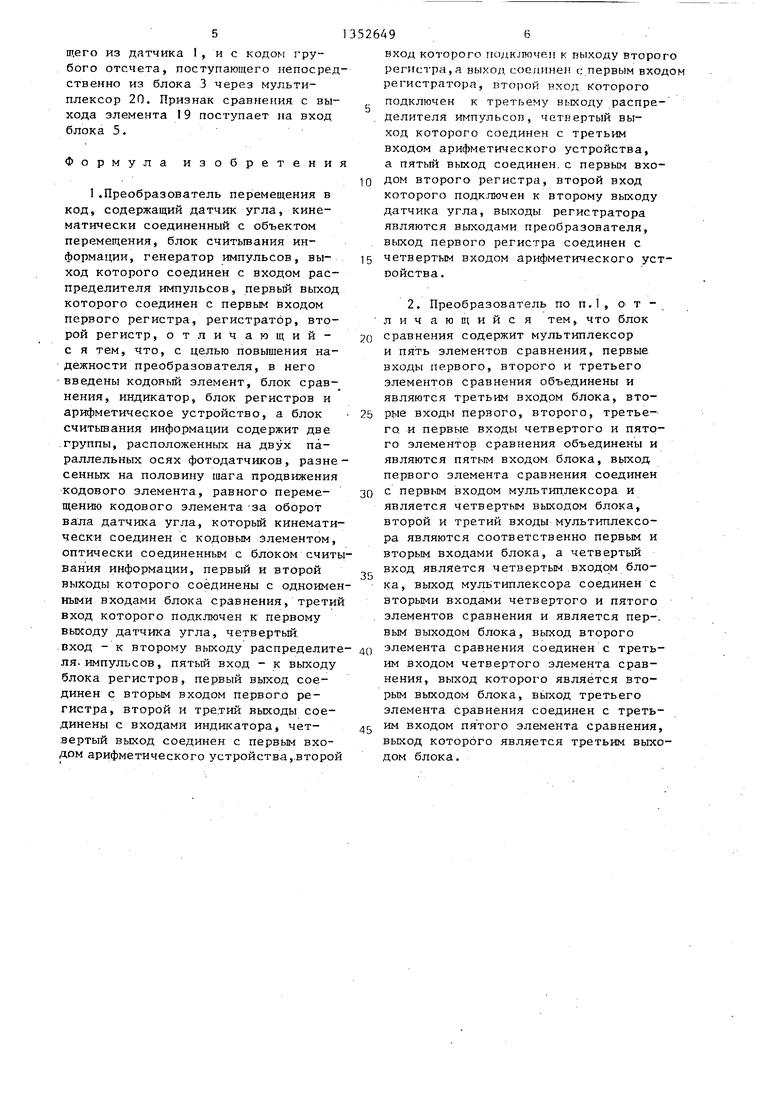
На фиг.1 представлена структурная схема преобразователя; на фиг.2 - структурная схема блока сравнения; на фиг.З - выполнение кодового элемента и его расположение относительно блока считьгоания информации.°
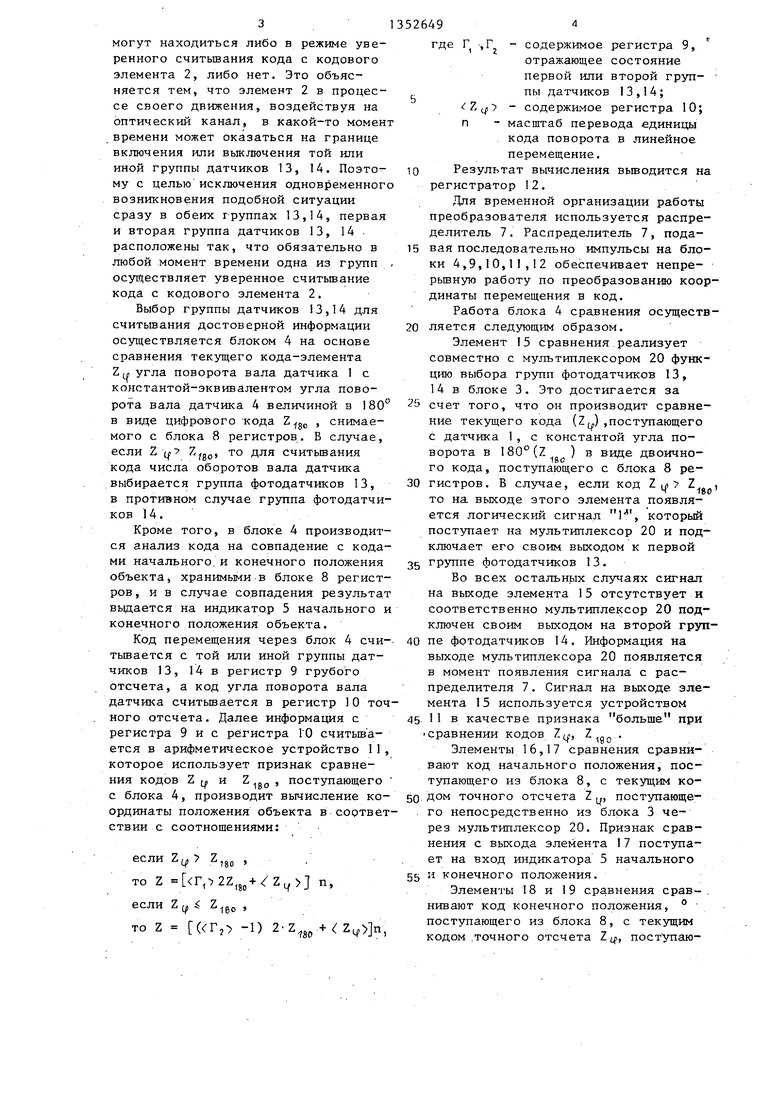
Преобразователь содержит датчик 1 угла, кодовый элемент 2, блок 3 считьшания информации, блок 4 сравнения, индикатор 5, генератор 6 импульсов , распределитель 7 импульсов блок 8 регистров, регистры 9 и 10, арифметическое устройство 11, регисратор 12, блок 4 сравнения содержит группы 13 и 14 фотодатчиков, блок 4 сравнения содержит элементы 15 - 19 сравнения и мультиплексор 20.
Преобразователь работает следующим образом.
При перемещении объекта приводитс во вращение вал датчика 1 угла, в качестве которого может быть применен фазовращатель с электронной схемой, преобразующий его сигналы в
анализ на совпадение значений кода с выхода кодового элемента 2 со значениями кода в блоке 8 регистров о конечном положении объекта перемещения. В случае равенства этих значений блоком 4 вьщается сигнал в индикатор 5 о конечном положении объекта Код перемещения объекта для точного отсчета считьшается в регистр 10, для грубого отсчета - в регистр 9. Определение координаты положения объекта осуществляется арифметическим устройством 11, а регистрация расчета-регистратором 12. Последовательность в работе схемы преобразователя обеспечивается импульсами, сформированными от генератора 6 с помощью распределителя 7 импульсов. 1 з.п. ф-лы, 3 ил.
5
0
5
0
цифровой код, пропорциональный углу поворота вала. Датчик 1 угла кинематически соединен с кодовым элементом 2, кодовые дорожки которого расположены перпендикулярно перемещению этого элемента (фиг.З). Фотодатчики в группах 13 и 14 располагаются вдоль дорожек кодового элемента 2 и их оси разнесены на расстояние, равное половине ширины кодовой дорожки, которая, в свою очередь, равна величине перемещения элемента 2 за один оборот вала датчика 1 угла. Число оборотов вала датчика I определяется путем считьшания текущего кода кодовьЕМ элементом 2 с помощью групп датчиков 13, 14 блока 3. Состояние каждой группы датчиков 13, 14 отражает положение элемента 2 в пространстве. Состояние датчиков 13, 14 выраженное в виде цифровых кодов, поступают в блок 4 сравнения для выбора первой или второй группы датчиков 13, 14 и для анализа начального и конечного положения объекта. Необходимость анализа достоверности информации, считьшаемой с первой или второй группы фотодатчиков 13, 14 обуславливается тем, что датчики в зависимости от положения воздействующего на них кодового элемента 2
3
могут находиться либо в режиме уверенного считьшания кода с кодового элемента 2, либо нет. Это объясняется тем, что элемент 2 в процессе своего движения, воздействуя на оптический канал, в какой-то момент времени может оказаться на границе включения или вьшлючения той или иной группы датчиков 13, 14. Поэтому с целью исключения одновременного возникновения подобной ситуации сразу в обеих группах 13,14, первая и вторая группа датчиков 13, 14 . расположены так, что обязательно в любой момент времени одна из групп осуществляет уверенное считывание кода с кодового элемента 2.
Выбор группы датчиков 13,14 для считьшания достоверной информации осзлцествляется блоком 4 на основе сравнения текущего кода-элемента угла поворота вала датчика I с константой-эквивалентом угла поворота вала датчика 4 величиной в 180° в виде цифрового -кода , снимаемого с блока 8 регистров, В случае, если Z q, /go Я-™ считьшания кода числа оборотов вала датчика выбирается группа фотодатчиков 13, в противном случае группа фотодатчиков 14.
Кроме того, в блоке 4 производится анализ кода на совпадение с кодами начального, и конечного положения объекта, хранимыми в блоке 8 регистров, и в случае совпадения результат выдается на индикатор 5 начального и конечного положения объекта.
Код перемещения через блок 4 счи- тьшается с той или иной группы датчиков 13, 14 в регистр 9 грубого отсчета, а код угла поворота вала датчика считьшается в регистр 10 точного отсчета. Далее информация с регистра 9 и с регистра ГО считьшается в арифметическое устройство 1 1 , которое использует признак сравнения кодов Z д, и Z gg , поступающего с блока 4, производит вычисление координаты положения объекта в соответствии с соотнощениями:
если Zi Z,j ,
то Z rp2Z, n,
если Zg, i ,
TO Z «rj -1) .+ ,
526494
где Г , Г, - содержимое регистра 9, отражающее состояние первой или второй груп- пы датчиков 13,14; Zg,7 - содержимое регистра 10; n - масштаб перевода единицы кода поворота в линейное перемещение.
Ю Результат вычисления вьшодится на регистратор 12.
Для временной организации работы преобразователя используется распределитель 7. Распределитель 7, пода- 15 вая последовательно импульсы на блоки 4,9,10,11,12 обеспечивает непре- рьшную работу по преобразованию координаты перемещения в код.
Работа блока 4 сравнения осуществ- 20 ляется следующим образом.
Элемент 15 сравнения реализует совместно с мультиплексором 20 функцию выбора групп фотодатчиков 13, 14 в блоке 3. Это достигается за 25 счет того, что он производит сравнение текущего кода (Z ,поступающего с датчика 1, с константой угла поворота в 180(Z ) в виде двоичного кода, поступающего с блока 8 ре- 30 гистров. В случае, если код Z ц 7 , то на выходе этого элемента появляется логический сигнал I, которЕзй поступает на мультиплексор 20 и подключает его своим выходом к первой 35 группе фотодатчиков 13.
Во всех остальньге случаях сигнал на выходе элемента 15 отсутствует и соответственно мультиплексор 20 подключен своим выходом на второй груп- 40 пе фотодатчиков 14. Информация на выходе мультиплексора 20 появляется в момент появления сигнала с распределителя 7. Сигнал на выходе элемента 15 используется устройством 45 1 в качестве признака больше при сравнении кодов Z(, ..
Элементы 16,17 сравнения сравнивают код начального положения, поступающего из блока 8, с текущим ко- 5Q дом точного отсчета Z , поступающе- . го непосредственно из блока 3 через мультиплексор 20. Признак сравнения с выхода элемента 17 поступает на вход индикатора 5 начального 55 и конечного положения.
Элементы 18 и 19 сравнения срав-. нивают код конечного положения, поступающего из блока 8, с текущим кодом .точного отсчета Z р, поступающего из датчика I, не кодом грубого отсчета, поступающего непосредственно из блока 3 через мультиплексор 20. Признак сравне(1ия с выхода элемента 19 поступает на вход блока 5.
Формула изобретени
1.Преобразователь перемещения в код, содержащий датчик угла, кинематически соединенный с объектом перемещения, блок считывания информации, генератор импульсов, выход которого соединен с входом распределителя импульсов, первый выход которого соединен с первым входом первого регистра, регистратор, второй регистр, отличаю щий- с я тем, что, с целью повышения надежности преобразователя, в него введены кодовый элемент, блок сравнения, индикатор, блок регистров и арифметическое устройство, а блок считьюания информации содержит две .группы, расположенных на двух параллельных осях фотодатчиков, разнесенных на половину шага продвижения кодового элемента, равного перемещению кодового элемента -за оборот вала датчика угла, который кинематически соединен с кодовым элементом, оптически соединенным с блоком считвания информации, первый и второй выходы которого соединены с одноимеными входами блока сравнения, трети вход которого подключен к первому выходу датчика угла, четвертый, вход - к второму выходу распределит ля. импульсов, пятый вход - к выходу блока регистров, первый выход соединен с вторым входом первого регистра, второй и третий выходы соединены с входами индикатора, четвертый выход соединен с первым входом арифметического устройства,.второй
вход которого подключен к выходу второго регистра,а выход соеяннен с первым входом регистратора, второй вход которого
J. подключен к третьему выходу распределителя импульсов, четвертый выход которого соединен с третьим входом арифметического устройства, а пятый выход соединен, с первым вхо- 1Q ДОМ второго регистра, второй вход которого подключен к второму выходу датчика угла, выходы регистратора являются выходами преобразователя, выход первого регистра соединен с
15 четвертым входом арифметического устройства.
2. Преобразователь по п.1, о т - личающийся тем, что блок
20 сравнения содержит мультиплексор и пять элементов сравнения, первые входы первого, второго и третьего элементов сравнения объединены и являются третьим входом блока, вто25 РЫе входы первого, второго, третьего и первые входы четвертого и пятр- го элементов сравнения объединены и являются пятым входом блока, вьгход первого элемента сравнения соединен
30 с. первым входом мультиплексора и является четвертым выходом блока, второй и третий входы мультиплексора являются соответственно первым и вторым входами блока, а четвертый вход является четвертым входом блока, выход мультиплексора соединен с вторыми входами четвертого и пятого элементов сравнения и является пер-, вым выходом блока, выход второго )Q элемента сравнения соединен с третьим входом четвертого элемента сравнения, выход которого является вто- рым выходом блока, вьгход третьего элемента сравнения соединен с треть jg им входом пятого элемента сравнения, выход которого является третьим выходом блока.
35
аз датчика 1
г
б истройствоИ дрегистрд5 ин8и1 оглорб
fpus. 2& индинаглор-5
из /fOHQ 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ интегрального преобразования релаксационных сигналов и устройство для его осуществления | 1986 |
|
SU1695324A1 |
| Цифровой анализатор спектра | 1987 |
|
SU1413545A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Устройство для обработки и передачи информации учета товарной нефти | 1987 |
|
SU1416978A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| КОДОИМПУЛЬСНОЕ ПЕРЕДАЮЩЕЕ УСТРОЙСТВО С СОКРАЩЕНИЕМ ИЗБЫТОЧНОСТИ ИНФОРМАЦИИ | 2001 |
|
RU2234738C2 |
| Устройство для ввода информации | 1984 |
|
SU1216776A1 |
| Преобразователь угол-код | 1988 |
|
SU1596461A1 |
| Устройство для считывания и отображения графической информации | 1986 |
|
SU1506459A1 |
| Устройство для регистрации информации | 1989 |
|
SU1698895A1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для преобразования перемещений в код. Для повьнпения надежности в преобразователь, содержащий датчик I угла, блок 3 считывания ин- формации, генератор 6 импульсов, распределитель 7 импульсов, регистр 00 СП INP о и СО фиг.1
Составитель М.Сидорова Редактор М.Товтин Техред А.Кравчук Корректор О.Кравцова
Заказ 5577/57 Тираж 900Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| Преобразователь перемещения в код | 1981 |
|
SU960882A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Фотоэлектрический преобразователь перемещений в код | 1984 |
|
SU1261113A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
