Описываемый датчик относится к известным статическим бескочтактным частотным датчикам скорости асинхронного двигателя, содержащим индуктивность и емкость, образующим колебательный контур с собственной частотой, равной частоте ротора контролируемого двигателя в номинальном режиме.
Для повыщения точности и надежности работы в описываемом датчике выход образован из двух активных сопротивлений, подключенных через диоды к разным обкладкам конденсатора колебательного контура. Таким образом получается выходной ток, величина и знак которого меняются с изменением величины и знака частоты.
Для регулирования уставки частоты конденсаторы выполнены секционированными и на входе колебательного контура включен дроссель насыщения.
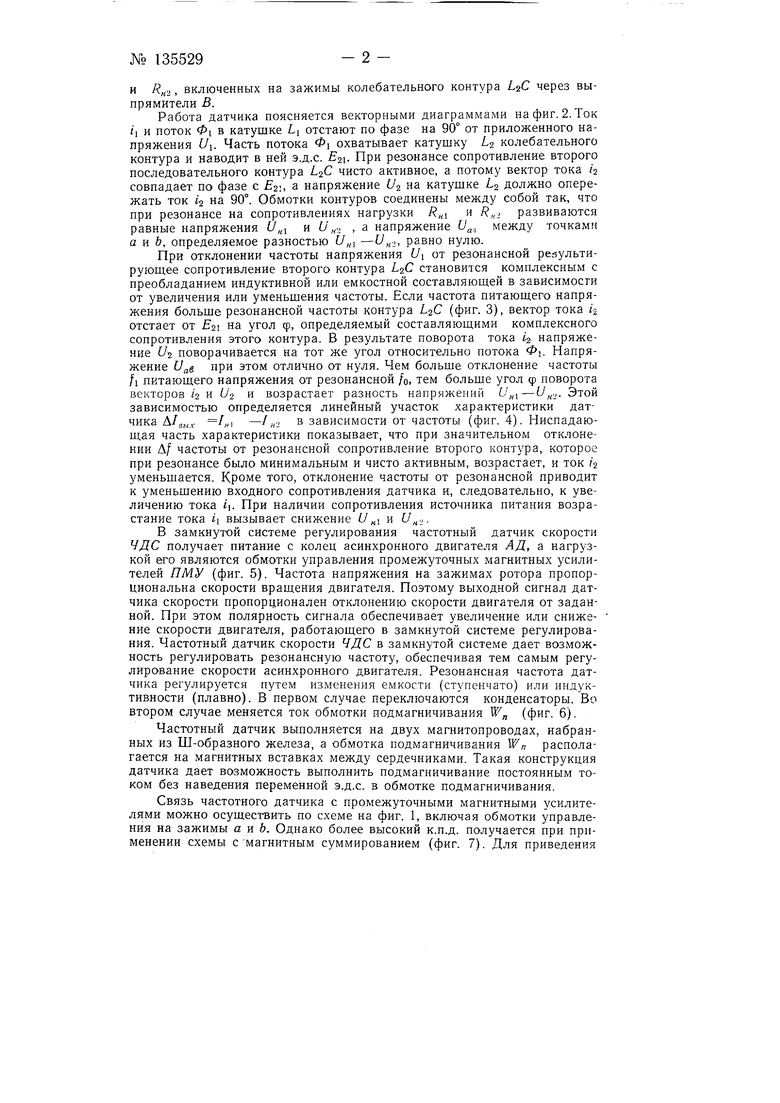
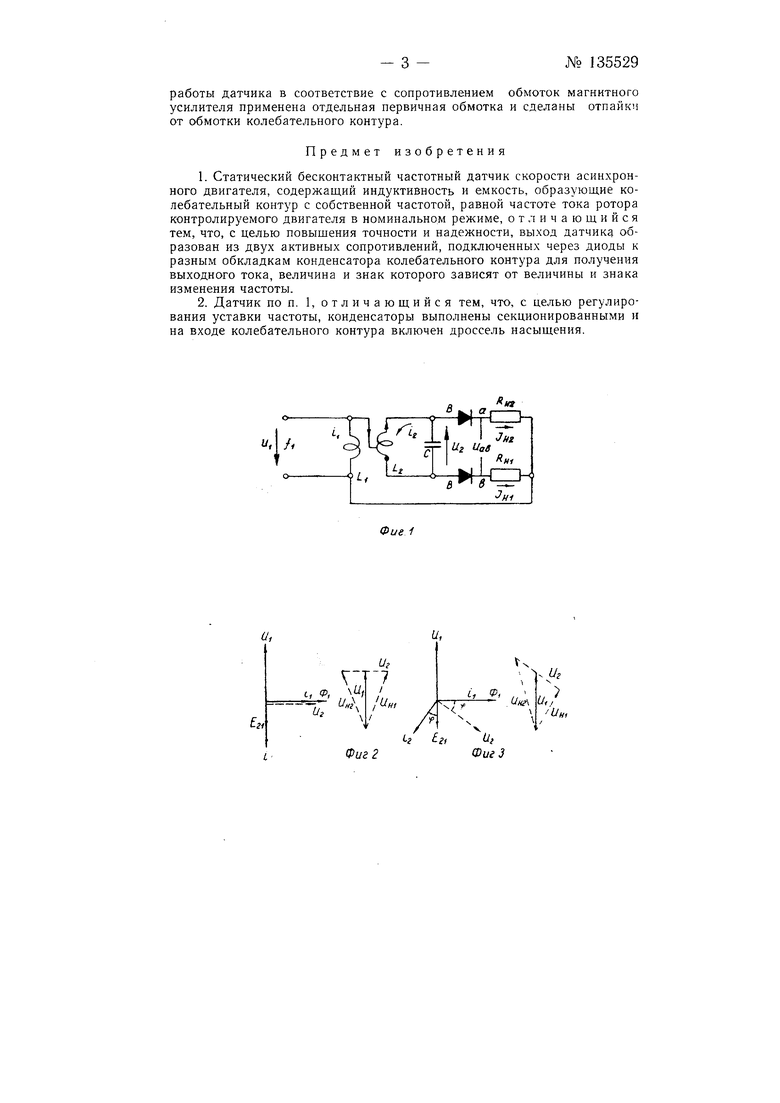
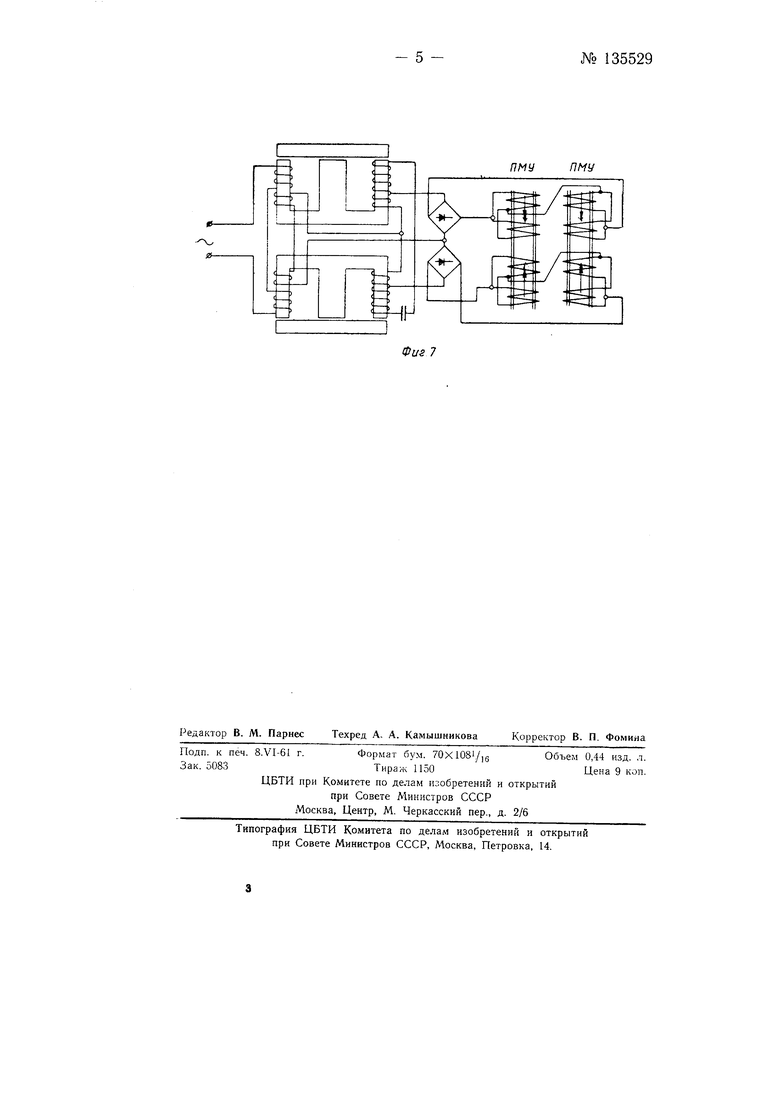
На фиг. 1 изображена схема описываемого датчика; на фиг. 2 - векторные диаграммы при резонансной частоте; на фиг. 3 - то же, при отклонении от резонансной частоты; на фиг. 4 - характеристика описываемого датчика; на фиг. 5 - схема подключения датчика к асинхронному двигателю; на фиг. 6 - конструкция магнитопровода датчика; на фиг. 7 - вариант соединения датчика с промежуточными магнитными усилителями.
Принцип действия описываемого датчика основан на резонансных свойствах колебательного контура, содержащего индуктивность и емкость.
К катушке LI, магнитосвязанной с катущкой La, подводится напряжение L/1 с переменной частотой f (фиг. 1). Сигнал, пропорциональный отклонению частоты, снимается с нагрузочных сопротивлений
№ 135529- 2 и , включенных на зажимы колебательного контура LgC через выпрямители В.
Работа датчика поясняется векторными диаграммами на фиг. 2. Ток /1 и поток 01 в катушке LI отстают по фазе на 90° от приложенного напряжения UL Часть потока Ф1 охватывает катушку Lg колебательного контура и наводит в ней э.д.с. 21- При резонансе сопротивление второго последовательного контура чисто активное, а потому вектор тока /2 совпадает по фазе с 21, а напряжение t/2 на катушке Lg должно опережать ток /2 на 90°. Обмотки контуров соединены между собой так, что при резонансе на сопротивлениях нагрузки „i и К„, развиваются равные напряжения U и , а напряжение U,, между точками а и Ь, определяемое разностью U„ -U.,, равно нулю.
При отклонении частоты напряжения U от резонансной реяультируюш,ее сопротивление второго контура LgC становится комплексным с преобладанием индуктивной или емкостной составляюпдей в зависимости от увеличения или уменьшения частоты. Если частота питаюш:его напряжения больше резонансной частоты контура LgC (фиг. 3), вектор тока /2 отстает от 21 на угол ф, определяемый составляюш,ими комплексного сопротивления этого контура. В результате поворота тока ig напряжение f/2 поворачивается на тот же угол относительно потока Ф. Напряжение f/ag при этом отлично ОТ нуля. Чем больше отклонение частоты /1 питающего напряжения от резонансной /о, тем больше угол ф поворота векторов /2 и Uz и возрастает разность напряжений U„ - /7„.,. Этой зависимостью определяется линейный участок характеристики датчика А/дыг /wi -/я2 в зависимости от частоты (фиг. 4). Ниспадаюш;ая часть характеристики показывает, что при значительном отклонении А/ частоты от резонансной сопротивление второго контура, которое при резонансе было минимальным и чисто активным, возрастает, и ток /2 уменьшается. Кроме того, отклонение частоты от резонансной приводит к уменьшению входного сопротивления датчика и, следовательно, к увеличению тока /1. При наличии сопротивления источника питания возрастание тока ii вызывает снижение U и ,.
В замкнутой системе регулирования частотный датчик скорости ЧДС получает питание с колец асинхронного двигателя АД,, а нагрузкой его являются обмотки управления промежуточных магнитных усилителей ПМУ (фиг. 5). Частота напряжения на зажимах ротора пропорциональна скорости врашения двигателя. Поэтому выходной сигнал датчика скорости пропорционален отклонению скорости двигателя от заданной. При этом полярность сигнала обеспечивает увеличение или снижение скорости двигателя, работаюш.его в замкнутой системе регулирования. Частотный датчик скорости ЧДС в замкнутой системе дает возможность регулировать резонансную частоту, обеспечивая тем самым регулирование скорости асинхронного двигателя. Резонансная частота датчика регулируется путем изменения емкости (ступенчато) или индуктивности (плавно). В первом случае переключаются конденсаторы. Во втором случае меняется ток обмотки подмагничивания W„ (фиг. 6).
Частотный датчик выполняется на двух магнитопроводах, набранных из Ш-образного железа, а обмотка подмагничивания Wn располагается на магнитных вставках между сердечниками. Такая конструкция датчика дает возможность выполнить подмагиичивание постоянным током без наведения переменной э.д.с. в обмотке подмагничивания.
Связь частотного датчика с промежуточными магнитными усилителями можно осуществить по схеме на фиг. 1, включая обмотки управления на зажимы а и Ь. Однако более высокий к.п.д. получается при применении схемы смагнитным суммированием (фиг. 7). Для приведения
работы датчика в соответствие с сопротивлением обмоток магнитного усилителя применена отдельная первичная обмотка и сделаны отпайки от обмотки колебательного контура.
Предмет изобретения
1.Статический бесконтактный частотный датчик скорости асинхронного двигателя, содержащий индуктивность и емкость, образующие колебательный контур с собственной частотой, равной частоте тока ротора контролируемого двигателя в номинальном режиме, отличающийся тем, что, с целью повыщения точности и надежности, выход датчика образован из двух активных сопротивлений, подключенных через диоды к разным обкладкам конденсатора колебательного контура для получения выходного тока, величина и знак которого зависят от величины и знака изменения частоты.
2.Датчик по п. 1, отличающийся тем, что, с целью регулирования уставки частоты, конденсаторы выполнены секционированными и на входе колебательного контура включен дроссель насыщения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСИЛИТЕЛЬ МАГНИТНОГО ПОТОКА И СИЛОВЫЕ ЭЛЕКТРОТЕХНИЧЕСКИЕ УСТРОЙСТВА НА ЕГО ОСНОВЕ | 2000 |
|
RU2201001C2 |
| КОММУТАЦИОННЫЙ СПОСОБ ВОЗБУЖДЕНИЯ ПАРАМЕТРИЧЕСКОГО РЕЗОНАНСА ЭЛЕКТРИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2841359C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ КОМПЕНСАЦИИ ПОТЕРЬ НА РЕАКТИВНУЮ СОСТАВЛЯЮЩУЮ В СЕТЯХ ПЕРЕМЕННОГО ТОКА | 2019 |
|
RU2697505C1 |
| Транспортное средство с гибридной силовой установкой | 2018 |
|
RU2701282C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ВОДЫ И ЕЕ РАСТВОРОВ В НИЗКОЧАСТОТНОЙ ОБЛАСТИ С ПОМОЩЬЮ L-ЯЧЕЙКИ | 2002 |
|
RU2234102C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ КОНТУРА ПАЦИЕНТА ПРИ УВЧ-ТЕРАПИИ | 1992 |
|
RU2012379C1 |
| ПАТИП-НО- .,TEXiltT4?C?{A5 ^^ БИ5.711бТЕ1;д | 1967 |
|
SU190673A1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ МЕХАНИЧЕСКОЙ ПРОЧНОСТИ КРЕПЛЕНИЯ СИДЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2478945C1 |
| СПОСОБ УТИЛИЗАЦИИ ЭНЕРГИИ МОЛНИИ | 2008 |
|
RU2369991C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
и,
и,
8ы. JHZ t
ПМУПНУ
