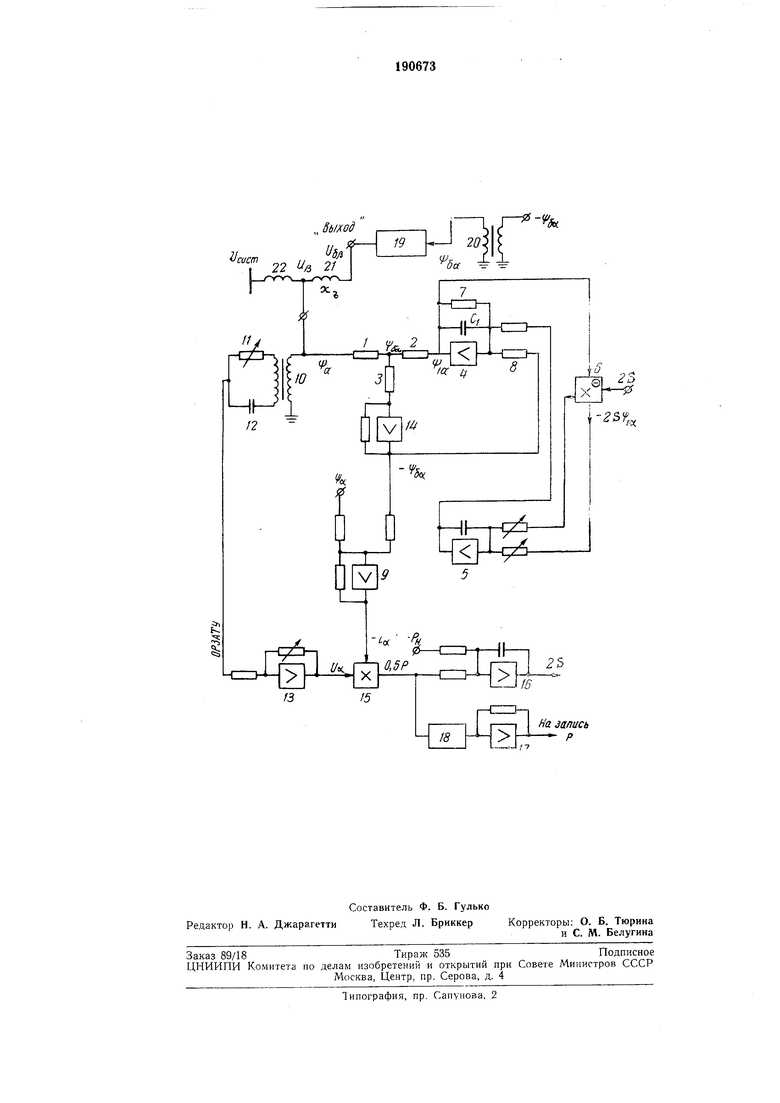
Изнестны устройства для моделирования асинхронного двигателя, предназначенные для совместного использования с сетевыми элементами расчетной статической модели переменного тока и содержащие выполненные на аналоговых решающих элементах схемы замещения, колебательные контуры, блоки умножения, трансформаторы и катушки индуктивности. Предложенное устройство отличается от известных тем, что схема замещения и один из блоков умножения, используемый для управления частотой свободных колебаний, подключены к выходу интегратора колебательного контура, а блок умножения, используемый для получения электромагнитной активной мощности, одним из входов присоединен к источнику напряжения, пропорционального току схемы замещения, и другим входом - к точке соединения схемы замещения и катушки индуктивности. Кроме того, к схеме замещения подключены последовательно соединенные катушки индуктивности и усилитель мощности, ко второму .входу которого через трансформатор подсоединена средняя точка схемы замещения модели асинхронного двигателя. На чертеже приведена принципиальная схема устройства. Для моделирования уравнения, связывающего потокосцепления статора и а ротора с теми же токами, используется схема замещения машины по оси, неподвижной относительно статора (сопротивления Л 2 и 3). К схеме замещения прикладываются напряжения ijja и J3ia . Для получения величины фа используется равенство |.v Ь,:; (активное сопротивление статора может учитываться отдельно) , а величина i(ib получается с помощью колебательного контура, состоящего из усилителей 4, 5 и инвертирующего усилителя блока умножения 6. Влияние величины 2 Иа на колебательный контур учитывается с помощью сопротивлений 7 и 8. На усилителе 4, помимо операции интегрирования, осуществляется суммирование сигналов tJ5ia и фг, с соответствующим коэффициентом для учета влияния тока ротора ib на колебательный контур. Напряжение, пропорциональное току fa статора и необходимое для вычисления мощности, получается па выходе усилителя 9, причем для моделирования тока статора L используется уравнение
статора; фм - потокосцепление зазора и X, - сопротивление рассеяния статора.
Для получения электромагнитной мощности необходимо иметь напряжение статора Ua. , которое получается путем поворота вектора UP,
на 90°, так как U - V .
Для этого используется известная фазаповорачивающая схема на трансформаторе 10 с использованием сопротивления // и конденсатора 12. Усилитель 13 служит для обеспечения лостоянной нагрузки для фазоповорачивающей схемы и для удобства ее настройки.
Величина напряжения, пропорционального потокосцеплению воздушного зазора I)JM , нолучается на усилителе 4, работающем в режиме инвертора.
Напряжение, пропорциональное электромагнитной мощности Р, получается с помощью блока умножения 15.
Уравнение движения машииы решается обычным способом с помощью усилителя 16 в режиме интегрирования. Напряжение, пропорциональное мощности нагрузки Я„, подается от внешнего источника. Полученный на выходе усилителя 16 сигнал, пропорциональный величине 2S (S - скольжение), подается в схему колебательного контура через блок умножения 6. Этот сигнал улравляет частотой собственных колебаний контура.
Так как в величине напряжения на выходе блока умножения /5, среднее значение которого Пропорционально электромагнитной мощности двигателя, имеется переменная составляющая двойной частоты, то для наблюдения и записи этой величины используется усилитель 17 с двойным Т-образным активноемкостным фильтром 18 на входе, настроенным на запирание напряжения двойной частоты. Усилитель 17 имеет вспомогательное назначение.
Так как все моделирование асинхронного двигателя в данном случае осуществляется на переменном токе, то для связи этой модели с моделью внещней сети (линии электропередач, трансформаторы и т. п., представляемые с помощью активных и реактивных сопротивлелий), не требуется каких-либо специальных преобразователей.
Соединение математической модели асинхронного двигателя осуществляется с помощью усилителя мощности 19, работающего как источник напряжения. На вход усилителя мощности 19 подается напряжение, пропорциональное величине |;м . Изменение знака величины я|збс1 на обратный осуществляется с помощью трансформатора 20.
На выходе усилителя мощности 19 получается напряжение, пропорциональное э.д.с. воздушного зазора по оси р, которое подключается к катущке индуктивности 21, воспроизводящей сопротивление рассеяния статора асинхронного двигателя.
В полностью замкнутой схеме на другом конце катущки 21 получается напряжение С/з. пропорциональное величине напряжения на зажимах двигателя. Это напряжение используется в математической модели двигателя, так «ак можно принять tjja Uf, .В этом случае активное сопротивление статора двигателя можно учитывать путем включения активного сопротивления последовательно с индуктивным сопротивлением катушки 21.
Катушка индуктивности 22 пропорциональна сопротивлению внешней сети. Последняя может быть любой сложности и должна моделироваться обычным способом с помощью активных и реактивных сопротивлений, так как это делается на расчетных статических моделях переменного тока.
Предмет изобретения
1. Устройство для моделирования асинхронного двигателя, описываемого уравнениями по одной оси, неподвижной относительно статора, предназначенное для совместного использования с сетевыми элементами расчетной статической модели переменного тока и содержащее выполненные на аналоговых решающих элементах схему замещения, колебательный контур, блоки умножения, трансформаторы и катущки индуктивности, отличающееся тем, что, с целью упрощения устройства, схема замещения и один из блоков умножения, используемый для управления частотой свободных колебаний, подключены к выходу интегратора колебательного контура, а блок умножения, используемый для получения электромагнитной активной мощности, одним из входов присоединен к источнику напряжения, пропорционального току схемы замещения, и другим входом - к точке соединения схемы замещения и катушки индуктивности.
2. Устройство по п. 1, отличающееся тем, что для упрощения связи с моделью внешней сети, к схеме замещения присоединены последовательно соединенные катушка индуктивности и усилитель мошности, ко второму входу которого через трансформатор подключена средняя точка схемы замещения модели асинхронного двигателя.
8ыкод
(
ю
Чь
/2
23
,.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделированияСиНХРОННОгО гЕНЕРАТОРА | 1979 |
|
SU805360A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Устройство для измерения вращающего момента асинхронного электродвигателя | 1977 |
|
SU750298A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для моделирования синхронного генератора | 1982 |
|
SU1068952A2 |
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1981 |
|
SU976313A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕ{ЛЕН|ВЖИУ'« Л-' СТАТИЧЕСКИХ ХАРАКТЕРИСТИК СИНХРОННЫХ. МАЩ|Щм„1Ч* t | 1970 |
|
SU264808A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ КОРОТКОЗАМКНУТОГО РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2374752C1 |
| СПОСОБ ЗАЩИТЫ АСИНХРОННОГО ДВИГАТЕЛЯ ОТ ВИТКОВЫХ ЗАМЫКАНИЙ | 2005 |
|
RU2297704C1 |
На запись р
