Изобретение относится к обработке металлов давлением и может быть использовано для перемещения деталей.
Целью изобретения является повыше- t- ние надежности работы.
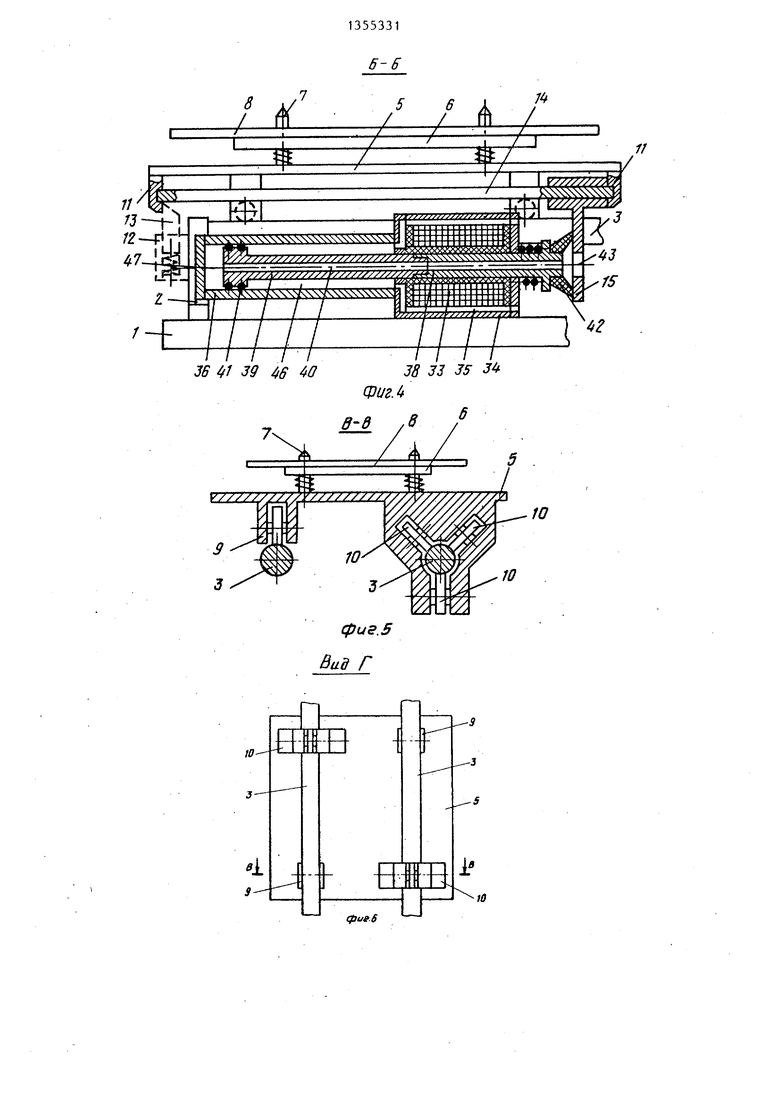
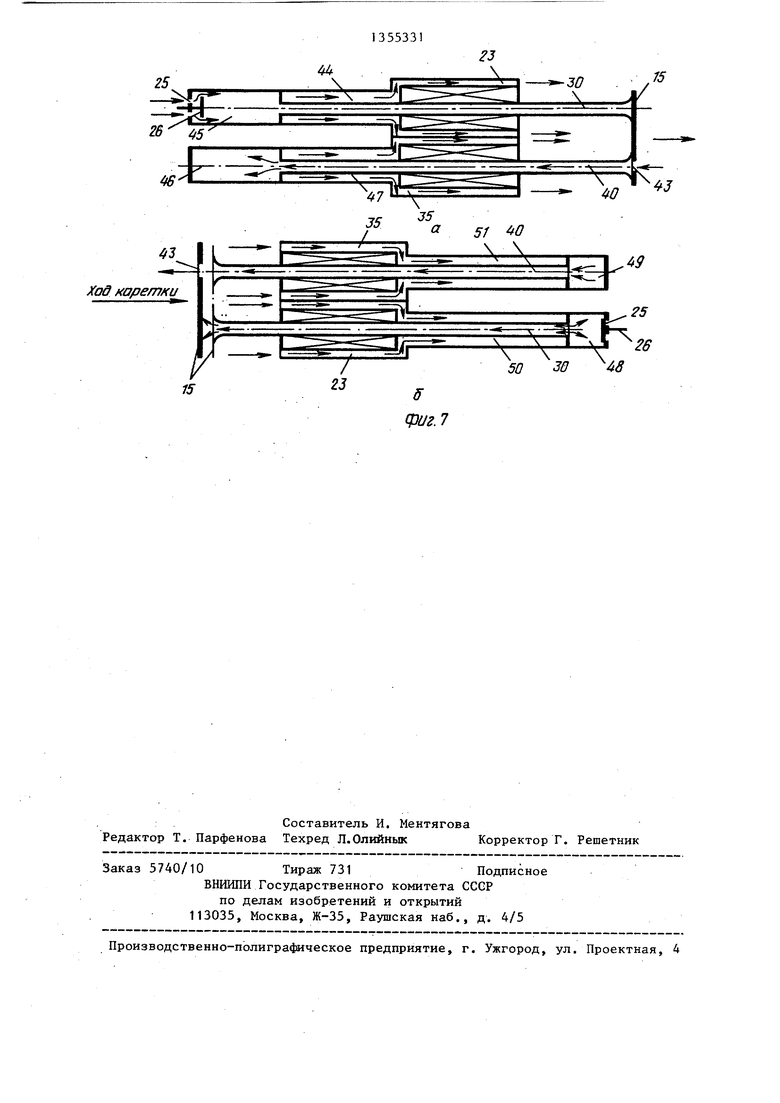
На фиг. 1 изображено предлагаемое устройство для перемещения деталей; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 2; на ю фиг.4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг.6; на фиг.6- вид Г на фиг. 1; на фиг. 7 - схема распределения воздуха при работе устройства. .15 ратурного режима. Система функциониУстройство содержит основание 1 со .рует совместно с. промышленными робоности упора и направляющей обработаны по шестому классу точности.
Оси направляющих 3 и 14 смещены друг относительно друга в вертикальной плоскости, что позволяет обеспечить движелие упора 15 как совместно с кареткой, так и отдельно от нее (на участке между ограничителями 11)
Электромагнитная система устройст ва служит для обеспечения перемещения каретки 4, автоматического демпфирования ее при подходе к стойкам 2 и для поддержания оптимального темпе
стойками 2, горизонтальные направляющие 3, установленные в стойках 2, каретку 4, подвижно установленную на направляющих 3. Каретка 4 содержит 20 основание 5 (корпус), несущее подпружиненную в вертикальном направлении площадку 6, перемещающуюся по стержням 7, нижняя часть которых закреплена на основании 5 (корпусе), а верхняя часть выступает за площадку 6, стержни 7 служат фиксаторами для деталей 8 на площадке 6.
К основанию 5 (корпусу) каретки крепится пара опорных 9 и пара тройных охватывающих 10 роликов. Ролики каждой пары размещаются на концах одной из диагоналей прямоугольного основания 5 каретки. Такое сочетание и расположение роликов 9 и 10 позволяет осуществлять движение каретки 4 на среднем участке направляющих 3 в случае их деформации без заклинивания. На торцах основания каретки 4 установлены ограничители 11, каждый из которых выполнен в виде вертикально расположенной пластины со скосом на нижнем конце, на наружной стороне стоек 2 установлено два электромагнита 12, якоря 13 которых контактируют с ограничителями 11. Под основанием 5 каретки 4 на участке между ограничителями 11 закреплена направляющая 14 (могут устанавливаться и две таких параллельно расположенных направляющих), на которой с возможностью продольного перемещения относительно каретки 4 установлен подвижный упор 15, выполненный в виде втулки с расширенной верхней частью.
25
30
„
40
45
50
55
Упор 15 изготовлен из фосфористой бронзы, направляющая - из нержавеющей стали, а контактирующие поверхратурного режима. Система функциониности упора и направляющей обработаны по шестому классу точности.
Оси направляющих 3 и 14 смещены друг относительно друга в вертикальной плоскости, что позволяет обеспечить движелие упора 15 как совместно с кареткой, так и отдельно от нее (на участке между ограничителями 11).
Электромагнитная система устройства служит для обеспечения перемещения каретки 4, автоматического демпфирования ее при подходе к стойкам 2 и для поддержания оптимального темпе
тами (не показаны) автоматической линии штамповки, причем схваты 16 и 17 роботов располагаются над кареткой 4 в ее крайних (рабочих) положениях. Электромагнитная система содержит два электромагнитных блока 18, установленных на основании 1 на загрузочной и разгрузочной позициях каретки; в сос5 таве каждого блока имеются электромагниты 19 и 20. Электромагнит 19 (фиг. 3) является длинноходовым,имеет катушку 21, помещенную в цилиндрический корпус 22, изготовленный из маг0 нитомягкого материала, в котором выполнены аксиальные каналы 23 для прохода воздуха. К одному из торцов корпуса 22 прикреплен стакан 24, в дне которого выполнены отверстия 25, перекрываемые подпружиненным клапаном 26. Соосно с катушкой 21, внутри ее установлен подпружиненный якорь 27, выполненный составным, состоящим из немагнитной 28 и магнитной 29 частей. Для улучшения динамических характеристик электромагнита отношение длины магнитной части к общей длине якоря (сердечника) 27 выбирается равным 0,7-0,8. Магнитная часть якоря 27 является поршнем. По всей дпине якоря 27 выполнен сквозной канал 30. На поршне выполнены кольцевые канавки, в которых установлены уплотнительные кольца 31, а на немагнитной части 28. якоря 27 установлена манжета 32, выполненная в виде присоски (раструба). Электромагнит 20 (длинноходовой) имеет катушку 33, помещенную в цилиндрический корпус 34 с аксиальными каналами 35 для прохода воздуха. К корпусу 34 прикреплен стакан 36. В катушке 33 установлен якорь 37, состоящий из немагнитной части 38 (собственно якоря) и магнитной части 39
0
5
0
5
313553314
(штока силового цилиндра) с поршнем, отверстие 25 поступает внутрь стака- Отношение длины магнитной части 39 на 24. Одновременно воздух в полости (штока) к общей длине якоря 37 выбра- 4 сжимается и через клапан 23 выдав- но равным 0,4-0,5, По всей длине яко- ливается в атмосферу, охлаждая катуш- ря 37 выполнен сквозной канал 40.На j ку и магнитопровод электромагнита 19. поршне магнитной части 39 выполнены Одновременно с якорем 27 втягива- кольцевые канавки, в которых установ- ется внутрь своей катушки 33 и якорь лены уплотнительные кольца 41. На 37, однако так как соотношение длины конце якоря 37 установлена манжета магнитной части к общей длине якоря 42, выполненная в виде присоски (ра- О у него меньше, чем соответствующее струба).В подвижном упоре 15 соосно соотношение в электромагните 19, то якорю выполнено отверстие 43. Между скорость перемещения якоря 37 в на- стаканом 24 и магнитной частью 29 чале его движения меньше, чем у яко- образована полость 44, связанная с ря 27, а в конце движения - больше, каналом 23.15 чем у якоря 27. Такая конструкция
электромагнитных блоков 18 позволяет
Устройство работает следующим при нахождении каретки 4 на любой образом.рабочей позиции ступенчато разгонять
Каретка 4 для транспортирования каретку и тем самым сообщать ей боль- деталей устанавливается на исходную 20 шую скорость движения, (загрузочную) позицию, например вруч- Во здух из атмосферы через отверс- ную. Пружина якоря 27 нагружена и пе- тие 43 в подвижном упоре 15 и канал редает усилие через буртик на немаг- 0 засасывается в полость 46, а сжа- нитной части 28 якоря и манжету 32 тый воздух из полости 47 через каналы на подвижный упор 15, который опира- 5 35 выдавливается в атмосферу, охлаж- ется на один из ограничителей 1t, . Дая катушку и магнитопровод электровторой ограничитель опирается на магнита 20.
выступ якоря 13 электромагнита 1.2, По окончании импульса тока катуш- таким образом каретка 4 надежно за- ки 21 и 33 и электромагнит 12 обесто- фиксирована в первой рабочей позиции.30 чиваются, якорь 13 возвращается в ис- Схват 16 промьшшенного робота уклады- ходное положение, а каретка 4 продол- вает деталь fзаготовку) 8 на стержни жает по инерции свое движение. При 7 и опорную площадку 6 каретки 4.Пос- подходе ее ко второму электромагнит-г ле чего по команде датчиков (не по- ному блоку 18 (фиг. 4 и 76) подвижный казаны), установленных, например,на 35 УП°Р упирается в манжету 32 и пе- самом схвате 16, подается сигнал в ремещается по направляющей 14 против виде импульса тока одновременно в ка- движения каретки, к ее противоположно- тушки 21-33 и обмотку соответствую- му концу (до второго ограничителя 11). щего электромагнита 12; электромагнит После чего движущаяся каретка 4 через 12 срабатывает, его якорь 13 втягива-40 ограничитель 11 и подвижный упор 15 ется и освобождает задний ограничи- воздействует на манжеты 32 и 42, упор тель 11, установленный на каретке 4, 15 притормаживается, а каретка 4 про- тем самым выдается разрешение на дви- должает свое движение и проходит путь, жение каретки.равный расстоянию между ограничитеПри прохождении тока по катушке 2145 лями 11. После чего каретка 4 и под- ее магнитное поле воздействует на вижный упор 15 перемещаются как еди- магнитную часть 29 якоря и якорь быст- ное целое. Якоря 27 и 37 электромаг- ро втягивается внутрь катушки. При нитов 19 и 20 под действием подвижно- своем движении он через манжету 32 го упора 15 вдвигаются внутрь своих воздействует на подвижный упор 15 и 50 катушек, воздух в полости 48 стакана передает усилие через передний огра- 24 сжимается и через сквозной канал ничитель 11 на каретку 4, которая 30 создает противодавление, передава- получает ускорение и начинает пе- емое на. каретку 4, она притормажива- ремещаться на роликах 9 и 10 по на- ется, между подвижными упорами 15 и правляюпщм 3 к разгрузочной позиции. 55 манжетой 32 образуется зазор,через При втягивании магнитной части 29 который часть воздуха стравливается, якоря внутрь катушки 21 в полости 45 каретка продрлжает свое движение с стакана 24 образуется разрежение, . jмeньшeй скоростью. Затем процесс дем- клапан 26 открывается и воздух через пфирования повторяется несколько раз.
до полной остановки и фиксации каретки 4, после чего по команде датчиков схват 17 разгружает деталь (заготовку) 8 с каретки, затем подается новый импульс тока в катушки электромагнитов 19 и 20 и обмотку электромагнита 12, чем обеспечивается движение каретки А за следующей деталью.
В процессе работы электромагнита 20 воздух из полости 49 через сквозой канал 40 и отверстие 43 выходит атмосферу. Таким образом при работе боих электромагнитов воздух прокаивается через каналы 23 и 25 и посупает в полости 50 и 51, охлаждаяг, атушки и магнитопроводы электромагитов.
ормулаизобретения
1355331
приводов штоков
10
15
20
е с я тем, что надежности рабо ничителями, зак каретке, упор р ляющими и устан телями с возмож направлении,пар перемещения мат ствия с огранич элементами, пло возможностью пе ном направлении направлении, ме нен в виде элек установленных н стороны подающе стью взаимодейс чителями, привод виде электромаг ках выполнены с электромагнитны каналами с поло корпуса и силов и дополнительны двух частей, од которых выполне риала, а другая ного материала, нены с длиной м 0,7-0,8 длины ш штоки выполнены части, равной 0 тельного штока.
1. Устройство для перемещения ма териала, содержащее направляющие, смонтированные на основании, подающую каретку, перемещающуюся в направляющих при помощи опорных элементов и несущую упор, механизм фиксации подающей каретки в заданных положениях площадку для размещения материала, смонтированную на подающей каретке, механизм перемещения и торможения подающей каретки, смонтированные на основании, расположенные по обе стороны подающей каретки и выполненные в виде полых цилиндрических корпусов расположенных параллельно направлени перемещения материала, поршней, подвижно установленных в полостях цилиндрических корпусов, штоков,закреп ленных на поршнях силовых цилиндров, расположенных параллельно направлени перемещения материала, дополнительных поршней, подвижно установленных в корпусах силовых цилиндров, дополнительных штоков, закрепленных на дополнительных поршнях, опорных эле- ментов, смонтированных на штоках,и
приводов штоков
5
0
5
0
о
5
5
от. личающе- е с я тем, что, с целью повьпиения надежности работы, оно снабжено ограничителями, закрепленными на подающей каретке, упор расположен над направляющими и установлен между ограничителями с возможностью перемещения в направлении,параллельном направлению перемещения материала, и взаимодействия с ограничителями и опорными элементами, площадка смонтирована с возможностью перемещения в вертикальном направлении и подпружинена в этом направлении, механизм фиксации выполнен в виде электромагнитов с якорями, установленных на основании по обе стороны подающей каретки с возможностью взаимодействия якорей с ограничителями, приводы штоков выполнены в виде электромагнитных катушек, в штоках выполнены сквозные осевые каналы, электромагнитные катушки соединены каналами с полостями цилиндрического корпуса и силового цилиндра, штоки и дополнительные штоки выполнены из двух частей, одна часть каждого из которых выполнена из магнитного материала, а другая часть - из немагнитного материала, причем штоки выполнены с длиной магнитной части, равной 0,7-0,8 длины штока, а дополнительные штоки выполнены с длиной магнитной части, равной 0,4-0,5 длины дополнительного штока.
2.Устройство по п.1, о т л и - чающее ся тем, что подающая каретка выполнена прямоугольной в плане.
3.Устройство по ПП.1 и 2, о т - личающе е с я тем, что часть опорных элементов выполнена в виде ролика и расположена по одной из диагоналей подающей каретки, другая часть опорных элементов выполнена в виде трех роликов и расположена.по другой диагонали подающей каретки, с возможностью охвата направляющих.
Ю
.
П
фиг. В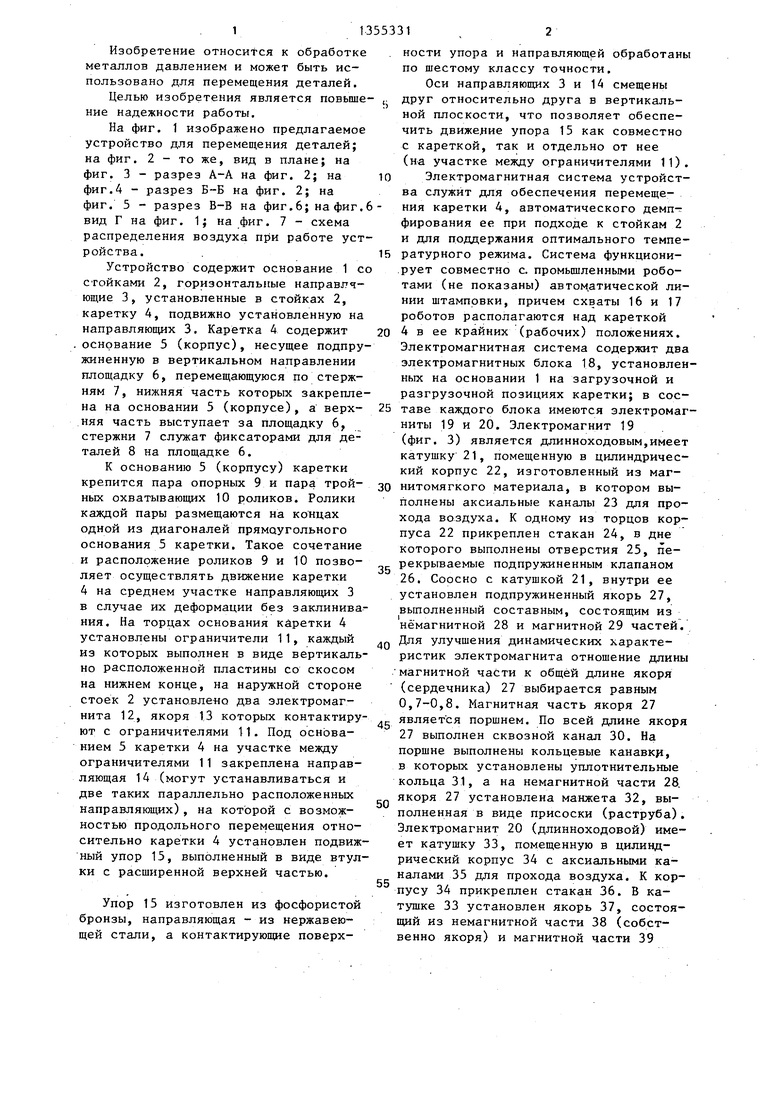
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ НАСОС | 2010 |
|
RU2424447C1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 2001 |
|
RU2217314C2 |
| ЭЛЕКТРОМАГНИТНЫЙ АППАРАТ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 1993 |
|
RU2037253C1 |
| УСТРОЙСТВО ДЛЯ ВПРЫСКИВАНИЯ ТОПЛИВА | 1996 |
|
RU2175076C2 |
| КЛАПАН ЗАПОРНЫЙ ЭЛЕКТРОМАГНИТНЫЙ | 2010 |
|
RU2477408C2 |
| Магнитогидравлический толкатель | 1987 |
|
SU1461752A1 |
| Электродвигатель возвратно-поступательного движения | 1989 |
|
SU1721740A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДАВЛЕНИЕМ СЖАТОГО ВОЗДУХА С РЕЗЕРВИРОВАНИЕМ ПО УПРАВЛЯЮЩЕМУ ВОЗДЕЙСТВИЮ | 2015 |
|
RU2662333C2 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
изобретение относится к обработке металлов давлением и может быть использовано для перемещения материала. Целью изобретения является повышение надежности устройства за счет обеспечения высокопроизводительного режима передачи детали с одной технологической позиции на другую. Материал перемещается с помощью подающей каретки, установленной на направляющих. Каретка приводится в движение и тормозится механизмами, смонтированными на основании по обе стороны каретки. Механизмы содержат цилиндры со штоками, упорные элементы, закрепленные на штоках, электромагнитные катушки, охватывающие штоки, и упоры, смонтированные на карегках. Электромагнитная система служит для обеспечения перемещения каретки, автоматического демпфирования ее при подходе к технологической позиции и для поддержания оптимального температурного режима. 2 з.п. ф-лы, 7 шт. (Л ел СП со 00
5 31 2 it 29 30 22 23 21
Фиг.з
28
8 /
Г
/
rfi /
7
I II 36 1(1 39 6 0
2
38 33 35 3
Фиг. ft В-д ,8
фие.6
9
50 3Q S
25 26
фиг. 7
| Устройство для подачи полосового и ленточного материала в зону обработки | 1981 |
|
SU1013048A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
