Изобретение относится к робототехнике и. в частности, к многозахватным манипуляторам промышленных роботов и может быть использовано в машино- и приборостроении для автоматизации сборки многокомпонентных изделий, например реле, в условиях серийного и мелкосерийного производства.
Целью изобретения является расширение технологических возможностей за счет уменьшения массы подвижных частей.
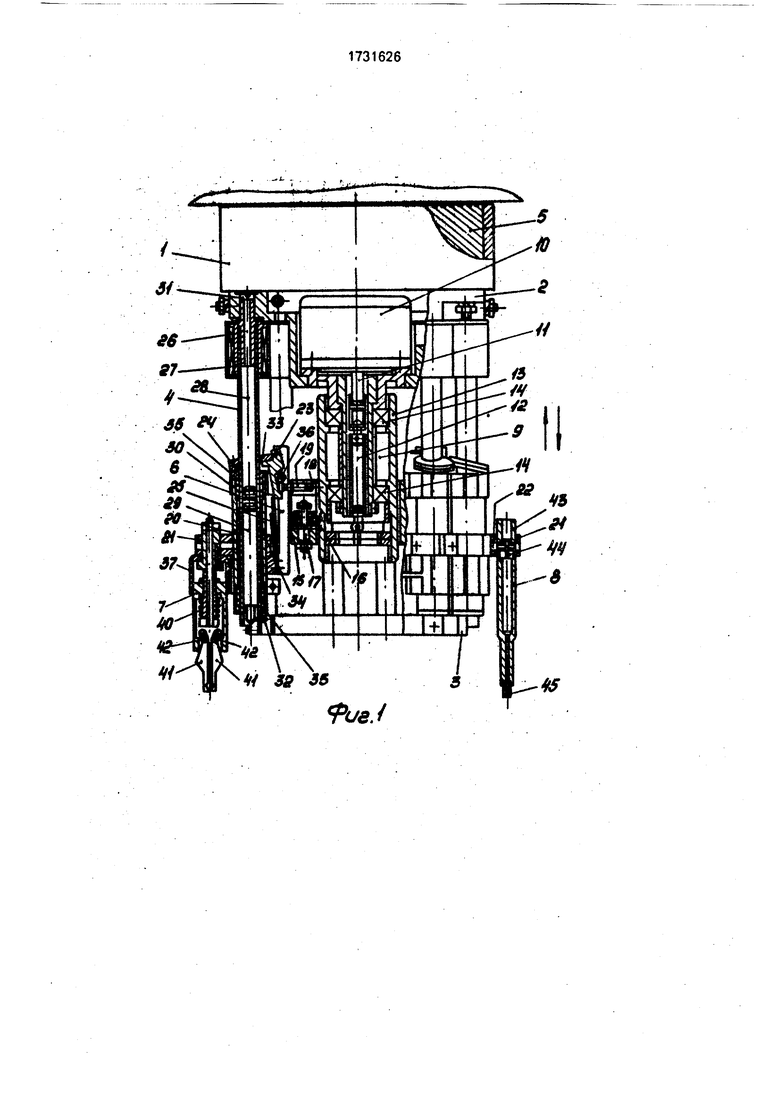
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - ведомая каретка с клещевым схватов в увеличенном масштабе.
Манипулятор включает в установленную на портале (не показано) плиту из электротехнической стали (не показано), под нижней зубчатой поверхностью ко- орой, удерживаясь ка расстоянии около 20 мкм от поверхности плиты, на магнитовоздушных направляющих установлена каретка 1, содержащая расположенные друг над другом основание 2 и рамку 3, в которые, соответственно, своими верхними и нижними концами жестко заделаны дополнительные направляющие 4. Количество последних равно максимально возможному количеству схватов, размещаемых на манипуляторе. С осно- ванием 2 жестко связан якорь 5 двухкоординатного шагового электродвигателя, обеспечивающего управляемое перемещение каретки 1 в горизонтальной плоскости по двум координатам. На каждой направляющей 4 установлено по одной ведомой каретке 6 вертикального перемещения с закрепленным в ней клещевым 7 или вакуумным 8 схватом.
На основании 2 закреплен привод 9 вертикального перемещения ведомых кареток 6, содержащий двигатель 10, вал 11 которого посредством муфты 12 соединен с ходовым винтом 13, установленным в подшипниковых опорах 14 основания 2. С ходовым винтом 13 сопряжена общая ведущая каретка 15 посредством не менее чем трех роликов 16, размещенных равномерно по окружности во впадине профиля ходового винта 13 и установленных каждый в отдельности с
со
С
ч
Сл
сЈ
ГО
о
возможностью вращения на своей оси t7, жестко закрепленной в корпусе 18 ведущей каретки 15, Кроме того, в отверстия корпуса 18 напротив каждой из ведомых кареток б запрессован поводок 19. сопрягаемый с соответствующей ведомой кареткой 6 при ее вертикальном перемещении по направляющей 4.
Каждая ведомая карегка 6 имеет корпус 20, в котором выполнено посадочное отверстие 21 для установки схвата 7 или 8, а также отверстие 22 для подачи сжатого воздуха. В пазу, выполненном в корпусе 20, запрессована ось 23, на которую с возможностью вращения надет рычаг 24, выполненный из магнитомягкого материала и выполняющий функции якоря электромагнита. При этом, одно плечо рычага 24 имеет отверстие, которое с зазором, обеспечивающим возможность необходимого угла поворота рычага 24 вокруг оси 23, охватывает направляющую 4, а другое плечо имеет контакт с возвратной пружиной 25, поджимающей рычаг 24 к поводку 19 каретки 15 и жестко заделанной в корпус 20 ведомой каретки 6.
К основанию 2 неподвижно прикреплены катушки 26 электромагнитов, каждый из которых соответствует ведомой каретке 6. При этом сердечник 27 каждой катушки 26 выполнен полым. Каждая из катушек 26 установлена так, что ее сердечник 27 охватывает по наружной поверхности соответствующую направляющую 4 в ее верхней части непосредственно около заделки последней в основание 2.
Катушка 26 с сердечником 27, а также рычаг 24 и возвратная пружина 25 в совокупности образуют устройство для управляемого отключения и удержания соответствующего схвата 7 или 8 в нерабочем положении.
Внутри направляющих 4 выполнены полости 28 и 29, отделенные одна от другой заглушкой 30. При этом полости 28 сообщаются с общим каналом 31, выполненным в основании 2, в который постоянно подается сжатый воздух, а полости 29 сообщаются с каналом 32, выполненным в рамке 3. В канал 32 сжатый воздух подается поспециальней команде. В стенках направляющих 4 для сообщения с полостями 28 и 29 выполнены соответственно отверстия 33 и 34. Между корпусом 20 ведомой каретки 6 и направляющей 4 имеется зазор, достаточный для того, чтобы расход проникающего сжатого воздуха обеспечивал срабатывание соответствующего схвата 7 или 8. В верхней и нижней части корпуса 20 запрессованы втулки 35, внутренние поверхности которых охватывают наружную поверхность направляющей 4 с минимальным зазором, при котором практически исключаются перетечки воздуха из полости 28 в полость 29 и, наоборот, при перекрытии верхней или нижней
втулкой 35 соответственно отверстия 33 или 34. Зазор между корпусом 20 и направляющей 4 образует полость в разрыве поверхностей скольжения направляющей 4 и втулок 35, которая выполняет функции
0 встроенного золотникового устройства, управляющего работой соответствующего схвата 7 или 8.
В пазу, выполненном в корпусе 20 ведомой каретки 6, установлен также вкладыш
5 36 таким образом, что, при воздействии возвратной пружины 25 на рычаг 24 поводок 19 занимает положение между рычагом 24 и вкладышем 36.
Клещевой схват 7 имеет корпус 37, в
0 котором выполнен канал 38, через который воздух из отверстия 22 корпуса 20 каретки 6 попадает в полость, образованную корпусом 37, и установленным внутри него с возможностью возвратно-поступательного
5 вертикального перемещения толкателем 39. Последний удерживается в корпусе 37 пружиной 40. Клещевой схват 7 включает губки 41. установленные с возможностью вращения каждая на своей оси 42, заделанной в
0 корпус 37.
Вакуумный схват 8 имеет корпус 43. в котором установлен эжектор 44, совмещенный с отверстием 2 а также присоску 45. Манипулятор растает следующим об5 разом.
При отработке заданной программы управляемого двухкоординатного шагового электродвигателя каретка 1, с основанием 2 которой жестко связан якорь 5, занимает
0 строго определенное программой положение, при котором схват 7 или 8 располагается над соответствующей технологической позицией. При этом все каретки 6 находятся в верхнем положении. Катушки 26 подклю5 чены к электропитанию, сердечники 27 намагничены, и каждый рычаг24, преодолевая воздействие возвратной пружины 25, прижат к соответствующему сердечнику 27 и удерживаемся в этом положении.
0 В канал 31 подается сжатый воздух, который из полости 28 через отверстие 33 попадает в зазор между направляющей 4 и корпусом 20 ведомой каретки 6, откуда через отверстие 22 корпуса 20 и совмещенно5 го с ним отверстия корпуса 37 схвата 7 проникает в полость, образованную корпусом 37 и толкателем 39, который, преодолевая действие пружины 40, занимает нижнее положение и, упираясь своим наружным торцом в поверхности губок 41, сжимает
последние до упора (фиг.1 и 2), Кроме того, из соответствующих отверстий 22 сжатый воздух проходит через эжектор 44 вакуумного схвата 8, в результате чего при наличии детали в присоске 45 во внутренней полости корпуса 43 образуется необходимое для удержания данной детали разрежение. Затем посредством управления на катушку 26 соответствующего схвата, например 7, подается сигнал в виде отключения электропи- тания, и рычаг 24 под действием возвратной пружины 25, поворачиваясь вокруг оси 23, зацепляет соответствующий данной каретке 6 поводок 19.
Подается команда на включение двига- теля 10 механизма привода вертикального перемещения. Вал 11 двигателя 10 через муфту 12 приводит во вращение ходовой винт 13. При этом ролики 16, вращаясь вокруг своих осей 17, сообщаютзаневоленному от вращения корпусу 18 ведущей каретки 15 вертикальное перемещение вниз. Ведущая каретка 15 посредством поводка 19 двигает находящуюся в сцеплении ведомую каретку 6. При подходе ведомой каретки 6 к крайне- му нижнему положению верхняя втулка 35 перекрывает отверстие 33, прекращая тем самым доступ воздуха в полость 29 и далее через отверстие 22 в канал 38 (или, если речь идет о вакуумном схвате 8, в эжектор 44). Под действием пружины 40 толкатель 39 совершает перемещение вверх, опираясь своим внутренним торцом в поверхность губок 41, тем самым поворачивая их относительно соответствующей оси 42 в направлениях, показанных на фиг.2 стрелками.
Если соответствующий схват 7 или 8 находится над позицией укладки детали,, происходит разжим губок 41 или соответст- венно, напуск атмосферного воздуха в присоску 45, и, в результате, отпускание детали схватом. Затем двигатель 10 приводится во вращение в обратном направлении и, воздействуя поводком 19 на штырь, ведущая каретка 15 возвращает ведомую каретку 6 в исходное верхнее положение, после чего на катушку 26 снова подается электропитание, а двигатель 10 останавливается.
Если соответствующий схват 7 или 8 находится над позицией захвата детали (выполняет операцию захвата детали), то после разжима губок 41 (или напуска атмо ферно- го воздуха в присоску 45) по управляющей
команде происходит подача сжатого воздуха в канал 32 рамки 3, и через полость 29, далее через отверстие 34 вновь в зазор между корпусом 20 каретки 6 и направляющей 4, затем через отверстие 22 в канал 38 (или в эжектор 44). Вновь происходит перемещение толкателя 39 вниз и посредством сведения губок 41 захват детали. Затем, при перемещении ведомой каретки 6 вверх, как только верхняя втулка 35 перестает перекрывать отверстие 33, подача сжатого воздуха в канал рамки 3 прекращается. Формула изобретения
1.Автоматический многозахватный манипулятор портального типа, содержащий горизонтально установленную на портале плиту, выполненную из электротехнической стали и имеющую профильную зубчатую нижнюю поверхность, каретку, установленную на нижней поверхности плиты с возможностью перемещения на магнитовоздушных направляющих по двум координатам с помощью встроенных в основание каретки якорей двух линейных шаговых электродвигателей, взаимодействующих с профильной поверхностью плиты, и схваты с приводами их выдвижения, отличающийся тем, что, с целью расширения технологических возможностей за счет уменьшения массы подвижных частей, он снабжен закрепленными на каретке дополнительными направляющими, на которых установлены схваты, при этом приводы выдвижения схватов объединены в единый привод, а каждый из схватов снабжен устройством для управляемого отключения его от единого привода и для удержания схвата в нерабочем положении, причем устройство для управляемого отключения схвата выполнено в виде электромагнитного механизма, катушка которого - закреплена на каретке, а якорь представляет собой рычаг и установлен на схвате с возможностью зацепления с выходным элементом единого привода.
2.Манипулятор по п. 1. отличающийся тем, что, с целью упрощения конструк-. ции, схваты выполнены двух типов: клещевыми с пневматическим приводом и вакуумно-эжекторными, при этом на рабочих поверхностях дополнительных направляющих и ответных им частях .схватов выполнены полости, совместно образующие золотниковые устройства в пневмоси- стеме схватов.
ь./
S8
зз 3S гъ ы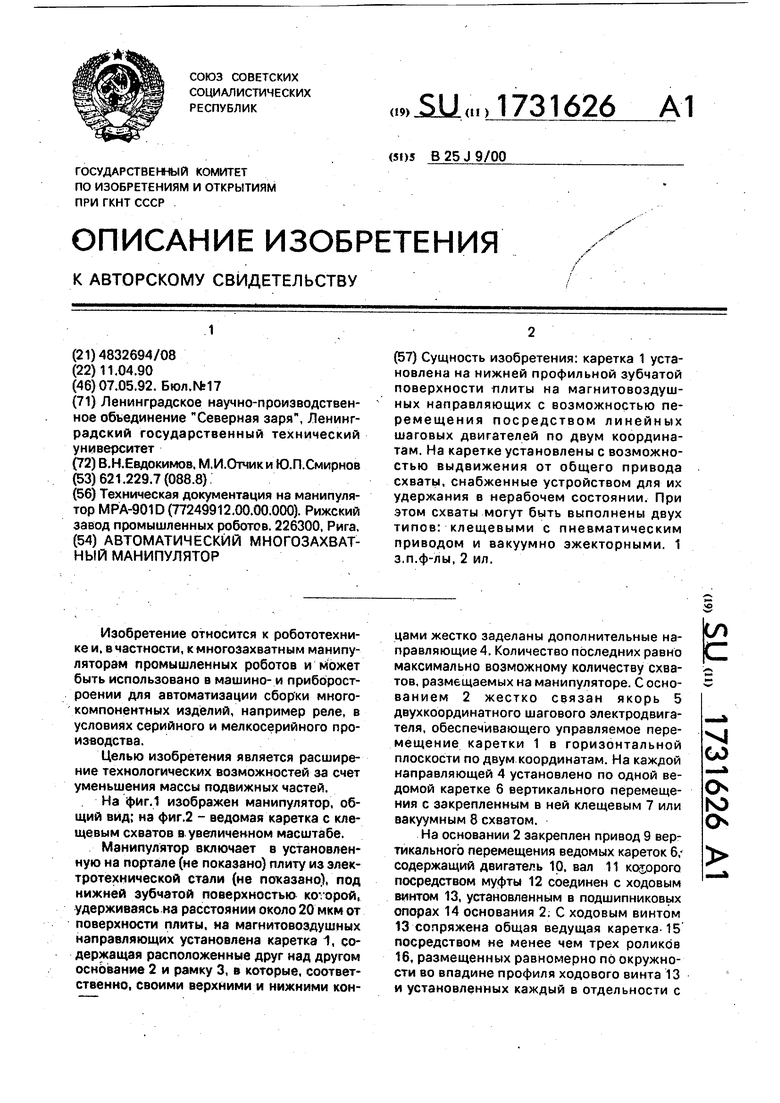

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Захват манипулятора | 1982 |
|
SU1126431A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |

Сущность изобретения: каретка 1 установлена на нижней профильной зубчатой поверхности ялиты на магнитовоздуш- ных направляющих с возможностью перемещения посредством линейных шаговых двигателей по двум координатам. На каретке установлены с возможностью выдвижения от общего привода схваты, снабженные устройством для их удержания в нерабочем состоянии. При этом схваты могут быть выполнены двух типов: клещевыми с пневматическим приводом и вакуумно эжекторными. 1 з.п.ф-лы, 2 ил.
Фи§.2
| Многолопастный разборный деревянный пропеллер | 1923 |
|
SU901A1 |
| Рижский завод промышленных роботов | |||
| 226300, Рига | |||
