Изобретение относится к автоматическим устройствам для управления длительностью циклов обработки текстильных материалов в технологических машинах периодического действия и может быть использовано в красильно-от- делочном производствах текстильной промьшшенности.
Цель изобретения - повышение быст- родействия.
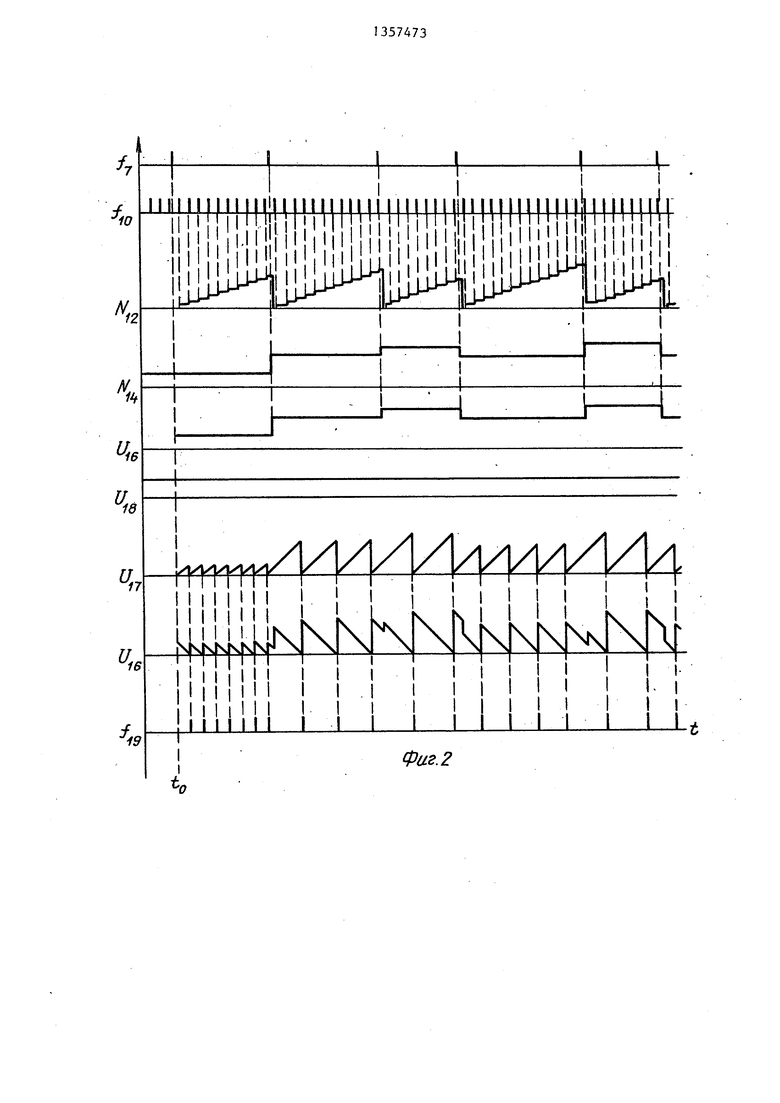
На фиг.1 изображена функциональная схема устройства; на фиг.2 и 3 - диаграммы формирования сигналов.
Устройство содержит (фиг.1) блок 1 управления приводом, привод 2 ра- :бочих органов 3, обрабатываемый в технологической машине 4 материал 5 с метками 6, датчик 7 меток, задающий блок 8, эталонные генераторы 9 и 10, блок 11 задержки, счетчик 12 импульсов, ключ 13, запоминающий блок 14, цифроаналоговый преобразователь 15, блок 16 сравнения, интегратор 17,блок
18опорного напряжения, формирователь
19импульсов, частотный дискриминатор 20, блок 21 коррекции, включающий интегратор 22, сумматор 23 и усилитель 24.
Выход блокз 1 управления приводом подключен к входу привода 2 рабочих органов 3 машины. Выход датчика 7 меток связан с управляющим входом ключа I3 и посредством блока 11 задержки с первым входом счетчика 12 импульсов, второй вход которого подключен к эталонному генератору 10. Первый вход блока 16 сравнения посредством цифро- аналогового преобразователя 15 и запоминающего блока 14 подключен к вы- ходу ключа 13, к информационному входу которого подсоединен выход счетчика 12 импульсов. Второй вход блока 16 сравнения подключен к выходу интегратора 17, а выход связан с входом формирователя 19 импульсов, выход которого подсоединен к первым входам частотного дискриминатора 20 и интегратора 17. Выход эталонного генератора 9 подключен посредством зада- ющего блока 8 к первому входу блока 1 управления приводом и второму входу частотного дискриминатора 20, выход которого посредством блока 21 коррекции связан с вторым входом бло- ка 1 управления приводом. Второй вход интегратора 17 подсоединен к выходу блока 18 опорного напряжения. Блок 21 коррекции включает последовательно соединенные интегратор 22 и сумматор 23, причем вход интегратора 22 объединен с входом усилителя 24, выход которого связан с вторым входом сумматора 23.
Устройство работает следующим образом.
В начальный момент работы технологической машины 4 линейная скорость перемещения материала 5 определяется напряжением Ug , формируемым задающим блоком 8, и зависит от частоты f. эталонного генератора 9
, ) i-г-э , где К - коэффициент передачи задающего блока 8;
K.j- суммарный коэффициент передачи блока 1 управления приводом, привода 2 рабочих органов и рабочих органов 3. Частота f выходного импульсного сигнала эталонного генератора 9 устанавливается в зависимости от заданной величины Т, длительности цикла обработки материала 5 в технологиКческой машине 4 f. j где К 1.
3
Счетчик 12 импульсов вьтолняет опрацию суммирования импульсов частоты f,g , поступающих на его второй вход с выхода эталонного генератора 10. Каждый импульс частоты f, сформированный датчиком 7 метки, открывает на время, равное длительности импульса, ключ 13 и содержимое счетчика 12 импульсов переписывается в запоминающий блок 14 5 а также с вьщерж кой времени, определяемой блоком 11 задержки, осуи1ествляет сброс содержимого (обнуление) счетчика 12 импульсов.
Число, записанное в запоминающий блок 14, и напряжение поступающее с выхода цифроаналогового преобразователя I5 на первый вход блока 16 сравнения, пропорциональны длительности цикла обработки материала 5 в технологической, машине 4, а анаf o
15- f .
Kjg - коэффициент передачи цифроаналогового преобразователя 15.
На второй вход блока 16 сравнения подается линейно изменяющееся выходное напряжение U, интегратора 17 .
При и,-, 11,5 на выходе формирователя 19 импульсов формируется импуль
чит и частоте f : 11,5- К,- - , где
31
осуществляющий, сброс (до нуля) выходного напряжения U, интегратора 17, и процесс сравнения напряжений U. и U(j повторяется, В результате на выходе формирователя 19 импульсов генерируется сигнал частоты f, , Если
yje
Т,т .
где - выходное напряжение блока 18 стабилизированного питания ; Tcf - постоянная интегрирования
интегратора 17, то f,(, f .
Стабилизация на заданном уровне дпительности цикла обработки материала 5 в технологической машине 4, т.е. обеспечение равенства f .J Т,
возможно лишь при выполнении соотно1
, шения f,) К f , причем величина К , определяющая частоту fg эталонного генератора 9, находится из выражения
1 У,а.
Kif ffo Т17
Частотный дискриминатор 20 осуществляет сравнение частот f и f импульсных сигналов, подаваемых соответственно на его первый и второй входы.
При поочередном поступлении импульсов на входы частотного дискрими .натора 20, т.е. при f f,,j его выходной сигнал не изменяется.
При условии, когда выходное напряжение UJQ частотного дискриминатора 20 имеет отрицательный знак в начальный момент и если fq , очередность поступления импульсов на входы частотного дискриминатора 20 неизбежно нарушается, т.е. наступает, момент, когда после прихода на первый вход частотного дискриминатора 20 , очередного импульса частоты f , на его второй вход поступают два (или более) подряд импульсов частоты f. В этом случае на выходе частотного дискриминатора 20 формируется напряжение UJQ положительного знака, которое подается на входы интегратора 22 и усилителя 24 блока 21 коррекции. В результате суммирования сумматором 23 выходного линейно изменяющегося напряжения интегратора 22 и усиленного усилителем 24 напряжения на второй вход блока 1 управления приводом подается плавно изменяющееся
574734
напряжение U, , которое суммируется с задающим напряжением Ug, что приводит к увеличению линейной скорости
V, материала 5, а следовательно, и частот fy и ,. до тех пор, пока не вьтолнится условие f, f, , что приводит к смене знака напряжения U , и процесс коррекции f производится
10 аналогично в обратном направлении. Применение в блоке 21 коррекции интегратора 22 позволяет восстановить симметрию автоколебаний в устройстве, а с помощью усилителя 24
15 достигается ограничение амплитуды колебания. Процесс коррекции может быть осуществлен за время, меньшее дпительности полного оборота материала 5 в технологической машине, так
20 как f ,, f-r .
Таким образом, в устройстве устанавливается режим автоколебаний частоты f,q относительно f , а частоты fy - относительно Т,, чем обеспёчи-
25 вается стабилизация длительности цикла обработки материала в технологической машине 4 на заданном уровне. При наличии внешних возмущаюш пс воздействий, например, таких, как
30 ошибка при первоначальной настройке технологическое изменение длины материала 5, износ рабочих органов 3 (т.е. уменьшение коэффициента К.2-з ) и т.п. режим автоколебаний в устройog стве становится несимметричным, т.е. оказьтаются неравными между собой длительности разнополярных выходных сигналов напряжения Ujo частотного дискриминатора 20. Кроме того, уст40 ройство вообще может потерять работоспособность, если величина сигнала Ujo недостаточна для целенаправленной коррекции частоты f и f,q в условиях действия возмущений. Например,
45 режим автоколебаний невозможен, если О и f, f,, . Увеличение Ugg нецелесообразно, так как это связано с ростом амплитуды колебаний частоты f, а следовательно, и со снижением
50 точности стабилизации длительности цикла обработки текстильного материала 5 в технологической машине 4.
В начальный момент времени частота f,g определяется числом N, пред55 варительно записанным в запоминающий блок 14. Если окажется, что f Т, и ,j,-T (или f Т; и N4 f,o Т,) частотный дискриминатор 20 с юрмирует сигнал , обратный (по
знаку) необходимому сигналу. Например, при необходимости уменьшить величину V , так как f, , V увеличивается, что приводит в начальный момент к увеличению отклонения длительности цикла обработки материала 5.
Для исключения указанной ошибки начальные значения V., и N, должны быть согласованными. С этой целью ве личину Kg коэффициента передачи задающего блока 8 следует установить в соответствии с выражением
LTM
К
8
К,.,., где 0,9 Ы. I,
а в запоминающий блок число
14 записать
N
В
14
- f
10
N,
. f,
ЭТОМ случае и, j. ,о - j.,, f i Т и f,p f-, что обеспечивает правильность направления коррекции скорости привода 2 (а следовательно.
20 к выходам цифроаналогового преобразо вателя и интегратора, а вькод - посредством формирователя импульсов сое динен с первыми входами частотного дискриминатора и интегратора, к втоУ ддИ f) ив начальный момент работы 25 рому входу которого подсоединен вы- устройства.
Формула изобретения
1. Устройство для автоматического управления длительностью циклов обработки текстильного материала в технологической машине, содержащее блок управления приводом, выход которого подключен к приводу рабочих органов машины, а один из входов связан посредством задающего блока с выходом эталонного генератора, датчик меток, счетчик импульсов, выход которого подсоединен к информационному входу
ход блока опорного напряжения, при этом второй вход частотного дискрими натора подключен к }зыходу эталонного генератора, а выход посредством бло30 ка коррекции связан с вторым входом блока управления приводом.
2. Устройство по п.1, отлича ющееся тем, что блок коррекции содержит усилитель, интегратор и сум
2g матор, причем входы усилителя и интеграторы .объединены и являются входом блока коррекции, а их выходы соответственно связаны с первым и вторым входами сумматора, выход которог
40 является выходом блока коррекции.
ключа, цифроаналоговый преобразователь, вход которого посредством запоминающего блока подключен к выходу ключа, формирователь импульсов, блок задержки и интегратор, отличат ю щ е е с я тем, что, с целью повышения быстродействия, оно имеет дополнительный эталонный генератор,
блок сравнения, частотный дискриминатор, блок коррекции и блок опорного напряжения, причем выход датчика меток подключен к управляющему входу ключа и посредством блока задержки к
первому входу счетчика импульсов, второй вход которого связан с выходом дополнительного эталонного генератора, первый и второй входы блока сравнения подключены соответственно
к выходам цифроаналогового преобразователя и интегратора, а вькод - посредством формирователя импульсов соединен с первыми входами частотного дискриминатора и интегратора, к вто25 рому входу которого подсоединен вы-
ход блока опорного напряжения, при этом второй вход частотного дискриминатора подключен к }зыходу эталонного генератора, а выход посредством бло30 ка коррекции связан с вторым входом блока управления приводом.
2. Устройство по п.1, отличающееся тем, что блок коррекции содержит усилитель, интегратор и сум2g матор, причем входы усилителя и интеграторы .объединены и являются входом блока коррекции, а их выходы соответственно связаны с первым и вторым входами сумматора, выход которого
40 является выходом блока коррекции.
9
Jf9
iJio
UllilllHIIIIMIilllinill Illllllllllllllinillllllllllllllil
1411
I I lUIIIHIIiliilllllllllililllllUiilllllllllllllllliiilllllllll
фиг. 3
1411


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1783577A2 |
| Устройство для стабилизации скорости намотки материала | 1982 |
|
SU1082738A1 |
| ЦЕЗИЕВЫЙ СТАНДАРТ ЧАСТОТЫ | 1994 |
|
RU2076411C1 |
| Устройство для измерения частоты | 1979 |
|
SU813291A1 |
| Устройство для регулирования времени обработки ткани в технологической машине | 1980 |
|
SU896117A1 |
| Устройство для измерения частотных характеристик канала связи | 1986 |
|
SU1381723A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЧАСТОТЫ НИЗКОЧАСТОТНЫХ СИГНАЛОВ | 1992 |
|
RU2101714C1 |
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |

Изобретение относится к текстильной промышленности. Цель изобретения повьшение быстродействия. Устройство содержит датчик 7 меток 6, размещенных на транспортируемом материале 5, сигналами которого перио; дически открьшается ключ 13, пропускающий от эталонного генератора 10 со счетчиком 12 соответствующее число в запоминающий блок 14. С помощью циф- роаналогового преобразователя 15 цифровой сигнал с выхода запоминающего блока 14 преобразуется в напряжение. подаваемое на первый вход блока 16 сравнения, на второй вход которого поступает линейно изменяющееся напряжение с выхода интегратора 17, подключенного к выходу блока 18 опорного напряжения. При равенстве входных напряжений.блока 16 сравнения на выходе формирователя 19 импульсов появляется импульсный сигнал, поступающий на первый вход частотного дискриминатора 20 и одновременно сбрасьшаю- щий интегратор 17 в исходное состояние . Частотный дискриминатор 20 осуществляет сравнивание частот с выхода формирователя 19 импульсов и эталонного генератора 9, в результате чего на его выходе формируется соответствующее разнополярное напряжение, подаваемое далее на вход блока 21 коррекции. Блок 1 управления приводом 2 рабочих органов машины в соответствии с сигналами на его входах с выходов блока 21 коррекции и задающего блока 8 изменяет скоростные режимы рабочих органов 3 технологической машины 4 и длительность цикла обработки материала 5. 1 з.п.ф-лы. 3 ил. i (Л со ел 4; ОО ч л
Составитель А.Козлов Редактор Н.Рогулич Техред М.Ходанич Корректор А.Тяско
- - ----- .- - - -.. .-.-.... г,
Заказ 5973/25 Тираж 420Подписное
ВШ-ПШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул,Проектная,4
| Устройство для регулирования времени обработки ткани в технологической машине | 1980 |
|
SU896117A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
