Изобретение относится к бурению скважин, а именно к устройствам для раскреп- ления-докрепления замковых соединений бурильной колонны.
Целью изобретения является упрощение конструкции устройства.
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - вид Г на фиг. 1.
Устройство включает механизмы 1 и 2 захвата, консольную опорную площадку 3 с направляющей 4, взаимодействующей с поворотным кронштейном 5, консольную
5
Подачей давления в цилиндры 21 произ водится сведение секторов 19 на теле замко вого соединения и самоустановка каждого механизма 1 и 2 относительно захватываемого ими элемента замкового соединения.
Самоустановка обеспечивается синхронным движением секторов 19, возможностью гор.изонтального перемещения механизмов 1 и 2 относительно опорных консольных площадок 3 и 6, наличием промежуточного элемента 23 сцепления.
Подачей давления в гидроцилидры 16 осуществляется относительное вращение внутренних 15 и наружных 14 корпусов, которое при противоположном направлении
опорную площадку 6 с направляющей 7, -j вращения внутренних корпусов 15 при сцеп- взаимодействующей с поворотным крон-ленных между собой корпусах 14 обеспещтейном 8, стойку 9, поворотный гидро-чивает раскрепление замкового соединения
цилиндр 10, закрепленный на стойке 9, гид-без передачи момента на несущую констроцилиндр 11 вертикального перемещения направляющей 7, закрепленной на кронштейне 8.
На направляющей 4 установлен фиксатор 12 и роликовый упор 13.
Механизмы 1 и 2 захвата включают взаимосцентрированные наружный 14 и внутренрукцию.
По окончании раскрепления замкового 20 соединения подачей давления в штоковую полость цилиндров 21 осуществляется разведение секторов 19 и последующей подачей давления в штоковые полости цилиндров 16 возвратное движение внутренних корпуний 15 корпуса, связанные гидроцилиндра- -,, сов 15 относительно взаи.мосвязанных (упоir Г ....1/.. ....iJ1 Г .........
30
ми 16. Гидроцилиндры 16 связаны с корпусом 14 осями 17, щтоки гидроцилиндров I G связаны с корпусом 15 осями 18. В корпусе 15 механизма 1 захвата размещены секторы 19 левого вращения, а в корпусе 15 механизма 2 захвата - секторы 19 правого вращения, сведение и разведение которых осуществляется приводом 20 от гидроцилиндра 21, закрепленного на корпусе 15.
В пазах корпуса 14 размещены управляе- .мые упоры 22, а на верхней плоскости корпуса 14 ления.
Корпус 15 снабжен упором 24 исходного положения, который контактирует с соответствующим упором 25 на консольной опорной площадке.
Устройство работает следующи.м образом.
В исходном положении при подъеме бурильной колонны механизм 1 располагается над механизмом 2, упоры 22 введены в гнезда эле.мента 23, кронштейны 5 и 8 отведены
рами 22 и элементами 23) наружных; при этом возврат наружных 14 корпусов в исходное положение обеспечивается взаимодействием упоров 24 исходного положения с упорами 25 консольных опорных площадок 3 и 6.
Подачей давления в поворотный цилиндр 10 осуществляется отвод механизмов 1 и 2 захвата от устья скважины.
При переходе с операции раскрепления на операцию докрепления (при переходе
про.межуточный элемент 23 сцеп- 35 спуск бурильной колонны) управляемые
упоры 22 выводятся из гнезд промежуточного элемента 23 сцепления, направляющая 7 и взаимодействующая с ней посредством консольного роликового упора 13 на- )1равляющая 4 спускаются гидроцилиндром 11 в нижнее крайнее положение, направляющая 4 фиксируется фиксатором 12 относительно кронщтейна 5 путем поворота кронштейна 5 (подача давления в поворотный гидроцилиндр 10). Связанный с ним
fi крайнее (от устья скважины) положение, механизм 1 выводится за пределы механиз ма 2, механизм 2 поднимается гидроцилиндром 11 в верхнее крайнее положение, крон- щтейн 5 возвращает механизм 1 в первоначальное положение, управляемые упоры 22 механизма 2 вводятся в гнезда про.межуточопорные плопл.адки 3 и 6 с механизмами и :1 подняты в верхнее положение цилиндром 11.
Поднимаемая бурильная колонна останавливается в момент входа замкового со- 50 ного элемента 23 сцепления механизма 1.
единения в зону механизмов 1 и 2 захвата с точностью, обуславливаемой величиной хода гидроцилиндра 11.
Подачей давления в поворотный гидроцилиндр 10 механизмы 1 и 2 подаются на устье скважины и открытием слива из гидроцилиндра 11 осуществляется точное под- Е едение секторов 19 к месту разъема замкового соединения.
Устройство подготовлено для осуществления операции докрепления замковых соединений при спуске бурильной колонны.
При г ереходе с операции докрепления 55 к операции раскрепления после выведения упоров 22 из гнезд элемента 23 направляющая 7 поднимается в верхнее крайнее положение, а затем производятся все промежу
Подачей давления в цилиндры 21 произ водится сведение секторов 19 на теле замко вого соединения и самоустановка каждого механизма 1 и 2 относительно захватываемого ими элемента замкового соединения.
Самоустановка обеспечивается синхронным движением секторов 19, возможностью гор.изонтального перемещения механизмов 1 и 2 относительно опорных консольных площадок 3 и 6, наличием промежуточного элемента 23 сцепления.
Подачей давления в гидроцилидры 16 осуществляется относительное вращение внутренних 15 и наружных 14 корпусов, которое при противоположном направлении
рукцию.
По окончании раскрепления замкового соединения подачей давления в штоковую полость цилиндров 21 осуществляется разведение секторов 19 и последующей подачей давления в штоковые полости цилиндров 16 возвратное движение внутренних корпусов 15 относительно взаи.мосвязанных (упоУстройство подготовлено для осуществления операции докрепления замковых соединений при спуске бурильной колонны.
При г ереходе с операции докрепления к операции раскрепления после выведения упоров 22 из гнезд элемента 23 направляющая 7 поднимается в верхнее крайнее положение, а затем производятся все промежуточные операции, осуществляемые при переходе с раскрепления на докрепление.
Формула изобретения
1. Устройство раскрепления-докрепления замковых соединений бурильной колонны, включающее секторный механизм захвата с корпусом и приводом вращения, отличающееся тем, что, с целью упрощения конструкции устройства, секторный механизм захвата выполнен в виде двух соосно расположенных механизмов, установленных на консольных опорных площадках, соединенных посредством направляющих вертикального перемещения с поворотными относительно общей оси кронщтейнами, причем каждый механизм выполнен с возможностью
одностороннего и противоположного по отношению к другому направления вращения секторов, а корпус выполнен в виде соосно расположенных друг относительно друга наружного и внутреннего корпусов, при этом внутренний корпус снабжен упором исходного положения, а наружный корпус - упрап- ляемым упором и промежуточным элементом сцепления.
2. Устройство по 11. I, отличающееся тс.м, что привод вращения выполнен в виде г ид- роцилиндров, щарнирно соединенных с на- ружны.м и внутрении.м корпусами, причем оси щарнирных соединений корпусов гидроцилиндров с наружным корпусом и штоков 5 с внутренним корпусом совмещены, а рабг)- чие поверхности секторов выполнены ступенчатыми.
0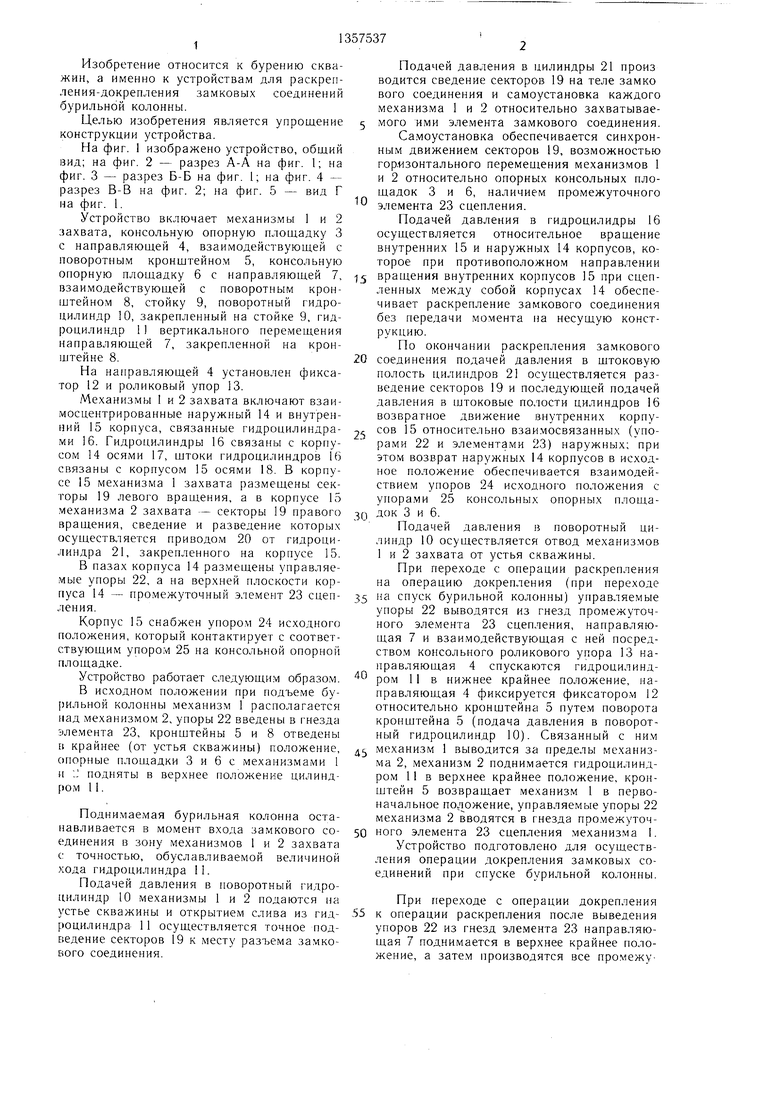

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство раскрепления-докрепления замковых соединений бурильной колонны | 1988 |
|
SU1521851A2 |
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 2003 |
|
RU2268983C2 |
| Ключ для свинчивания и развинчивания замкового соединения бурильных труб | 1981 |
|
SU1002510A1 |
| ВЕРХНЕПРИВОДНОЕ БУРИЛЬНОЕ УСТРОЙСТВО АНАТОЛИЯ ЛИТВИНОВА | 1995 |
|
RU2105861C1 |
| Автомат для спуско-подъемных операций в бурении | 1974 |
|
SU629314A1 |
| СПОСОБ СВИНЧИВАНИЯ ИЛИ РАЗВИНЧИВАНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2273716C2 |
| Ключ для свинчивания-развинчивания замковых соединений | 1983 |
|
SU1121383A1 |
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 1994 |
|
RU2078901C1 |
| ВЫСОКОМОМЕНТНЫЙ ТРУБНЫЙ КЛЮЧ | 1991 |
|
RU2019677C1 |
| Автомат для свинчивания-развинчивания насосно-компрессорных и бурильных труб | 1986 |
|
SU1452925A1 |
Изобретение относится к области бурения скважин и позволяет упростить конструкцию устройства. Оно включает секторный механиз.м (М) захвата с корпусом (К) и приводом, причем М установлены на консольных опорных площадках, соединенных посредством направляющих вертикального переменхения с поворотными кронштейнами. Секторы 19 каждого М имеют возможность вращения по OTHOHICHIUO к другому М, а рабочие поверхности секторов 19 ступенчатые. Указанный К выполнен из соосных К: наружного 14 с управляемым упором 22 и проме- л уточным элементом сцепления, и внутреннего 15 с упором 24 исходного положения. Привод вращения выполнен в виде гидро- щлиндров (ГЦ) 16 и 21, щарнирно соединенных с К 14 и 15. Оси 17, 18 соединений ГП 16, 21 с К 14 и HJTOKOB с К 15 совмещены. Подачей давления в поворотный ГЦ проводят секторы 19 к разъему замкового соединения и раскрепляют его. Разводят сектора 19 и подают давле1 ие в щтоковые полости ГЦ 16. Упоры 24, 25 взаимодействуют, а М отводят от устья. Переходят на операцию закрепления. При этом один из ЛА поднимается, а упоры 22 входят в гнезда элемента сцепления другого . При раскреплении направляющая поднимается и производят все промежуточные операции. 1 з. п. ф-лы, 5 ил. ( С оо О1 ел со 
фиг.
а
фиг.З
ff - в /7g/g/ Ay/7W
амгл
| Автоматический стационарный буровой ключ | 1983 |
|
SU1170111A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Ключ для свинчивания-развинчивания замковых соединений | 1972 |
|
SU597809A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
