Предлагаемое изобретение касается электродвигателя с качающимися якорями и имеет целью применением составных шатунов сделать независимой величину радиуса кривошипов от амплитуды качания якорей.
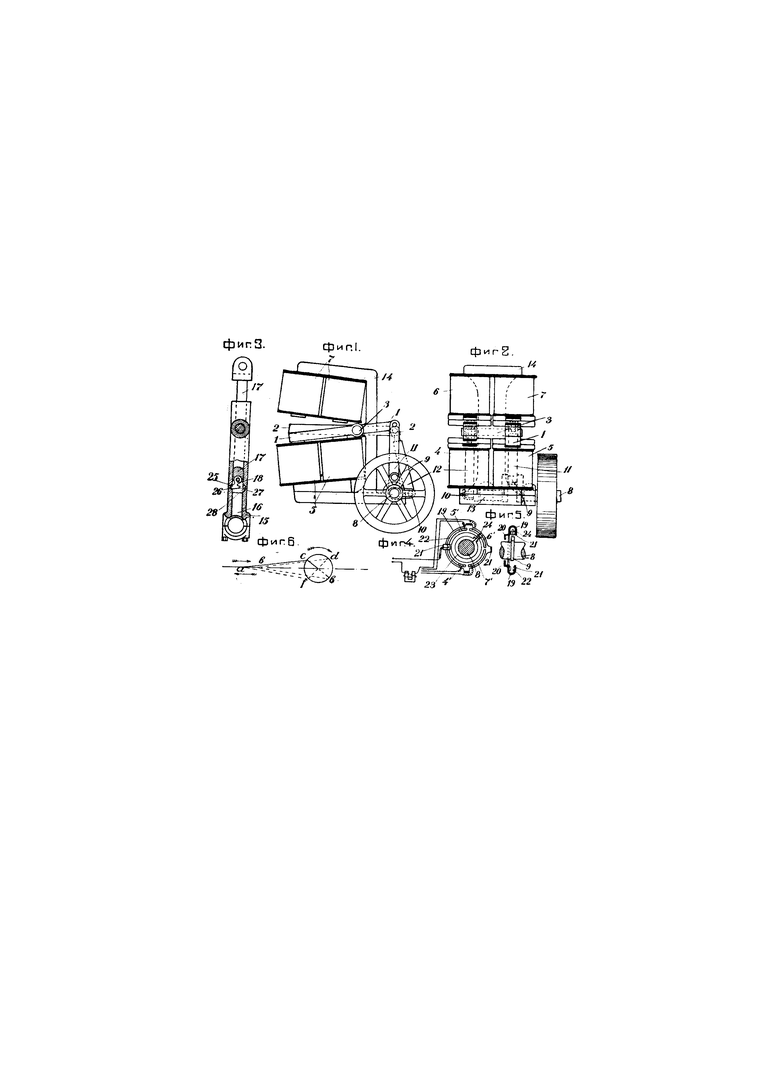
На чертеже фиг. 1 изображает вид двигателя спереди, фиг. 2 - его вид сбоку, фиг. 3 - продольный разрез шатуна, фиг. 4 - вид переключателя тока спереди, фиг. 5 - его разрез по вертикальному диаметру фиг. 4, фиг. 6 - схему перемещений шатуна и кривошипа.
На остове 14 двигателя (фиг. 1 и 2) укреплены наклонно друг к другу четыре электромагнита 4, 5, 6, 7. Между парой электромагнитов 4, 6 на оси 3, пропущенной в подшипнике остова 14, может качаться якорь 2, а между парой электромагнитов 5, 7 на той же оси 3 может качаться якорь 1, при чем плечо равнодействующих сил, создаваемых полюсами каждого электромагнита, равно плечу силы сопротивления. Якори 1 и 2 механически связаны с коленчатым валом 8 двигателя при помощи шатунов 11 и 12 и кривошипов 9 и 10. К подшипнику 13 вала 8 прикреплен переключатель тока, показанный на фиг. 4 и 5. Каждый из шатунов 11 и 12 состоит из части 15 (фиг. 3), снабженной осевым цилиндрическим каналом 16 и механически связанной с соответствующим кривошипом 9 и 10 вала 8, и из могущего перемещаться в канале 16 штока 17, механически связанного одним концом с плечом качающегося якоря и снабженного на другом конце двухзубой собачкой 18, имеющей назначение механически связывать часть 15 и шток 17 при движении последнего в ту или другую сторону лишь в течение доли оборота кривошипа. Переключатель тока (фиг. 4 и 5) состоит из кольцевой коробки 19, укрепляемой лапками/20 к подшипнику 13 вала 8 двигателя. На одной из внутренних сторон коробки 19 размещены дуговые пластины 4′, 5′, 6′, 7′, связанные электрически соответственно с обмотками электромагнитов 4, 5, 6, 7 и изолированные от коробки. На другой внутренней стороне коробки 19 к лапкам 21 прикреплено кольцо 22, соединенное с одним из полюсов источника тока и также изолированное от коробки. На валу 8 одета шайбочка 23, несущая изолированный от нее контактный ролик 24, перемещающийся при вращении вала 8 по внутренней части кольцевой коробки 19 и трущийся как по кольцу 22, так и по дуговым пластинам 4′, 5′, 6′, 7′.
Действие двигателя заключается в следующем: каждый из электромагнитов 4, 5, 6, 7 действует на соответствующий якорь в течение одной четверти оборота вала в случае двигателя, имеющего два якоря, а в общем случае - в зависимости от числа якорей. Следовательно для рассматриваемого двигателя действие каждого из шатунов на соответствующий кривошип будет продолжаться в течение поворота последнего на полоборота, при чем в этом действии будет перерыв на четверть оборота. Действие шатуна на кривошип производится во время такого их взаимного расположения, когда момент движущей силы будет близок к максимальному. Так, на фиг. 6 действие одного электромагнита на якорь будет продолжаться за время, когда конец последнего проходит путь ab, а конец кривошипа описывает дугу cd, измеряемую углом 90°, а кривошип второго якоря приходит за это время в точку с. В течение следующей четверти оборота рассматриваемый якорь остается без движения, а поворот вала происходит под действием второго якоря, притягиваемого своим электромагнитом, а за это время кривошип, связанный с первым якорем, приходит в точку е. В течение 3-й четверти оборота вал вращается опять под действием первого якоря, который, совершает качание в другую сторону, притягиваемый противоположным электромагнитом и кривошип первого якоря описывает дугу ef, а кривошип второго якоря приходит за это время в точку е. Последняя четверть оборота совершается аналогично под действием второго якоря, а первый это время остается в покое, затем цикл повторяется в том же порядке. Нужное для подобного действия двигателя включение и выключение электромагнитов производится автоматически вышеописанным переключателем. Периодическое же действие якорей достигается устройством составных шатунов. Так, когда якорь прижимается к сердечнику электромагнита и при дальнейшем движении соответствующего кривошипа вниз остается в покое, связанный с якорем шток 17 (фиг. 3) освобождается от связи с частью 15 шатуна, так как зуб 25 двухзубой собачки 18 выходит из гнезда 26, и когда при последующем движении этого кривошипа вверх, якорь придет в действие и потянет шток 17 кверху - зуб 27 собачки войдет в гнездо 28 и связь якоря с кривошипом будет осуществлена. Попадание зуба собачки в то или иное гнездо обусловливается наклоном шатуна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для ориентации машиниста в пути и подачи свистков | 1922 |
|
SU1236A1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1997 |
|
RU2172841C2 |
| ЭЛЕКТРИЧЕСКАЯ ПИШУЩАЯ МАШИНА | 1924 |
|
SU1875A1 |
| Станционный указатель отправления поездов | 1930 |
|
SU33183A1 |
| Прибор для притирки клапанов | 1930 |
|
SU23814A1 |
| ПРОТИВОПОЖАРНОЕ УСТРОЙСТВО ДЛЯ КИНОПРОЕКТОРА | 1927 |
|
SU10028A1 |
| Автоматический ткацкий станок | 1988 |
|
SU1606545A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2178826C1 |
| Автоматический телефонный коммутатор | 1923 |
|
SU1850A1 |
| Устройство для подачи листов в валки прокатного стана | 1935 |
|
SU51375A1 |
Электродвигатель с качающимися якорями, притягиваемыми попеременно неподвижными электромагнитами, питаемыми поочередно током, характеризующийся применением составных шатунов, принимающих в мертвых точках вертикальное положение и состоящих. каждый из механически связанной с кривошипом приводного вала части 15, снабженной осевым цилиндрическим каналом, и из могущего перемещаться в канале штока 17, механически связанного с одного конца с плечом качающегося якоря и снабженного на другом конце двухзубой собачкой 18, предназначенной механически связывать часть 15 и шток 17 при движении последнего в ту или другую сторону лишь в течение доли оборота кривошипа.
