Изобретение относится к измерительной технике и может быть иснользовано в качестве преобразователя неремещений в системах унравления нодвижными объектами.
Цель изобретения - повышение точности преобразования за счет снижения чувствительности к нерабочим смещениям якоря, а также расширение функциональных возможностей устройства за счет формирования специального выходного сигнала, фикси- руюшего факт выхода якоря за пределы допустимой зоны нерабочих смешений.
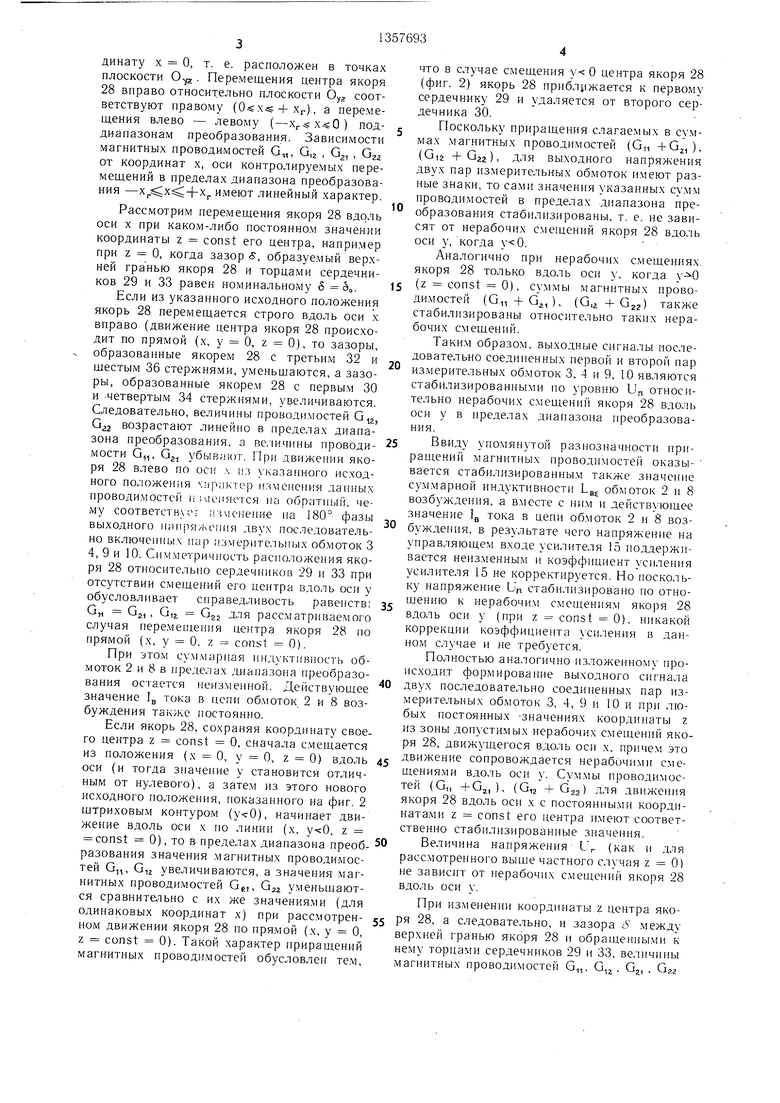
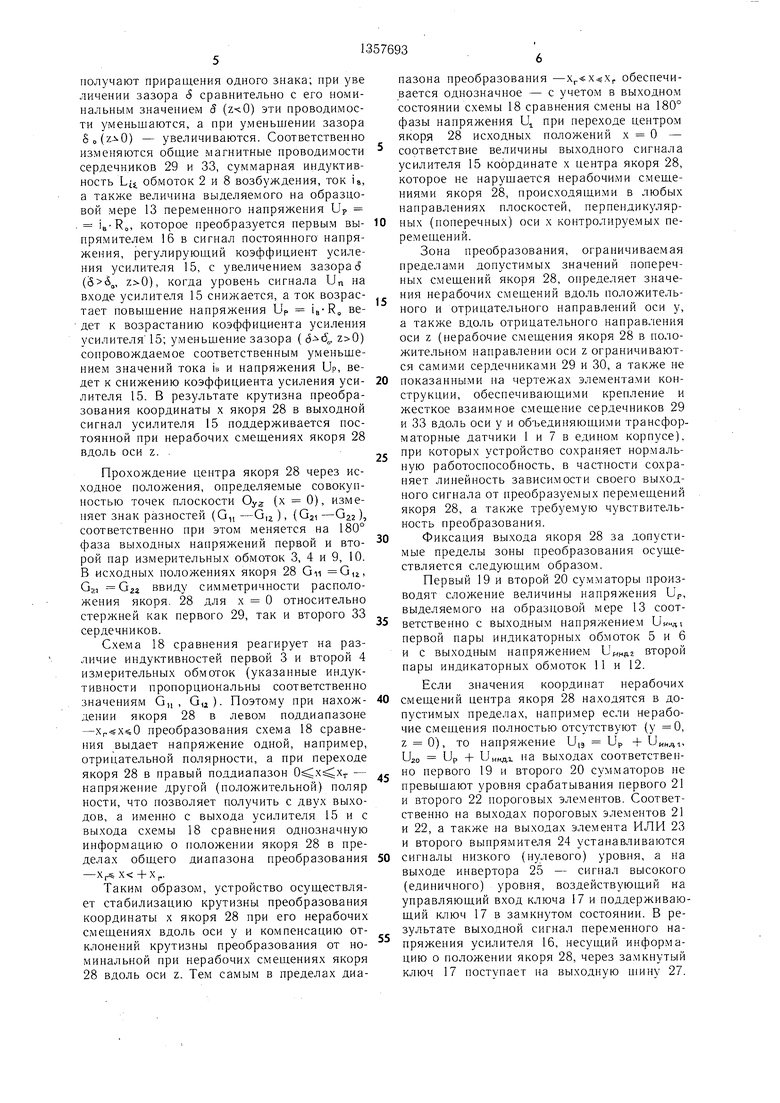
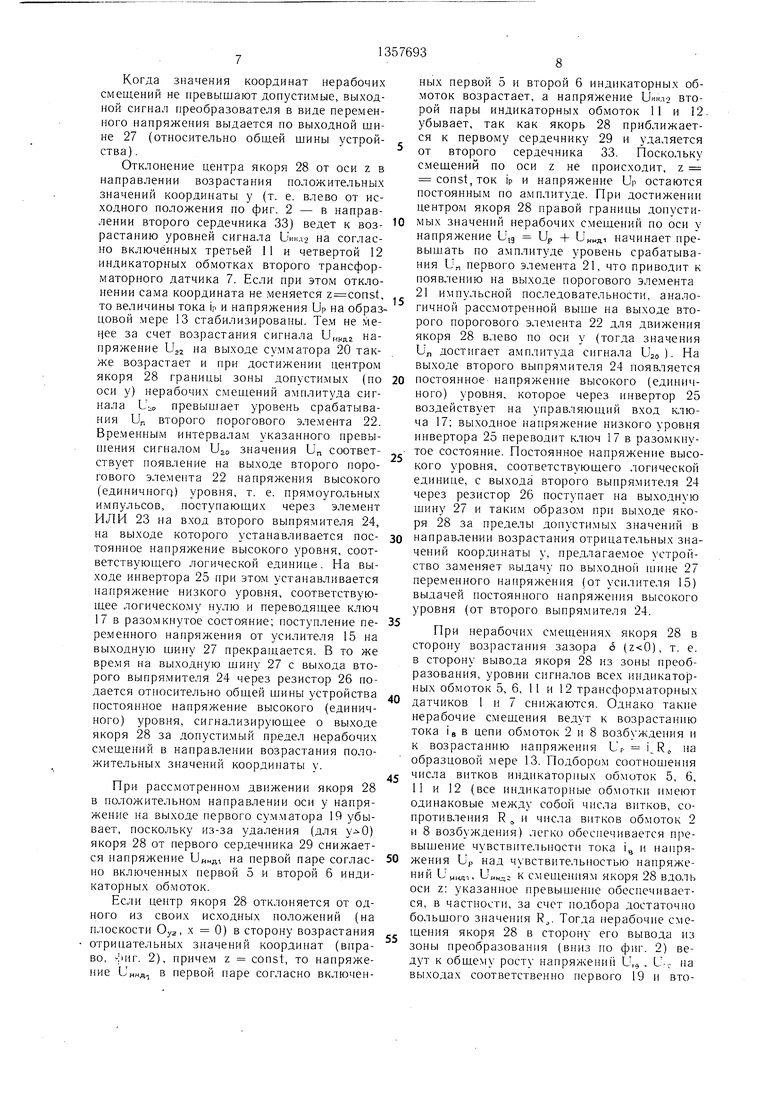
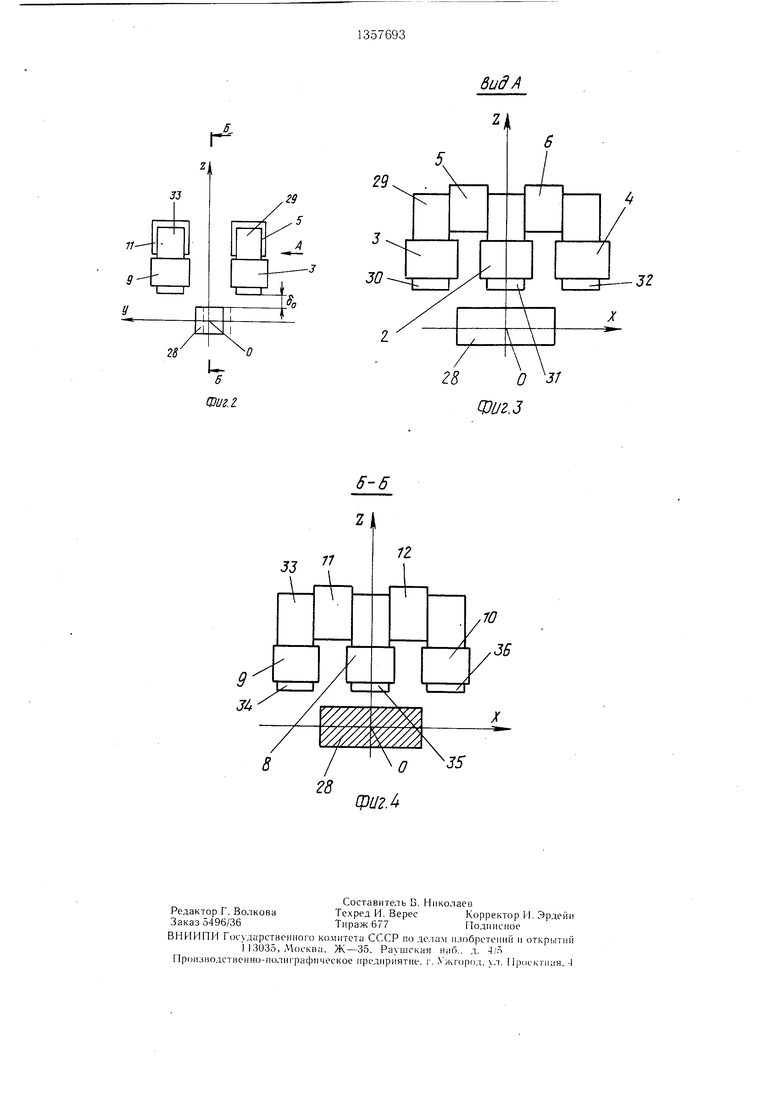
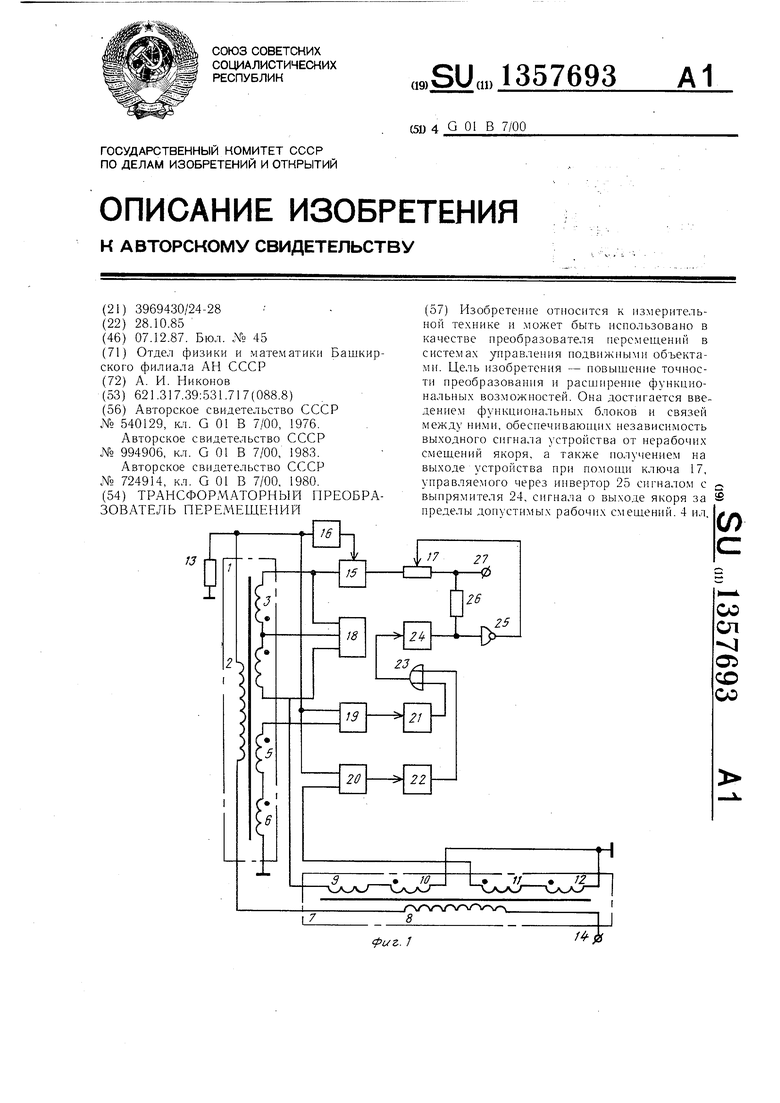
На фиг. 1 приведена блок-схема тран- сфор.маторного преобразователя перемеш,е- ний; на фиг. 2 - конструктивное выполнение преобразователя; на фиг. 3 - вид А на фиг. 2; на фпг. 4 - разрез Б-Б на фиг. 2.
Преобразователь содержит первый трансформаторный датчик 1, электрическая схема которого включает в себя обмотку 2 возбуждения, пару встречно соединенных между собой первой 3 и второй 4 измерительных обмоток, а также пару согласно соединенных первой 5 и второй 6 индикаторных об.мотйк, второй трансформаторный датчик 7, схема которого включает обмотку 8 возбуждения, пару соединенных встречно третьей 9 и четвертой 10 измерительных обмоток, а также пару согласно соединенных третьей 11 и четвертой 12 индикаторных обмоток, образцовую меру 13 посредством которой первая 2 и вторая 8 обмотки возбуждения, соединенные согласно, подключены к обшей шине, njHHy 14 питания, к которой подключены обмотки 2 и 8, управляемый усилитель 15, к сигнальному входу которого подключены согласно включенные пары измерительпых об.моток 3, 4 и 9, 10, первый выпрямитель 16, включепный между образцовой мерой 13 и управляющим входом усилителя 15, ключ 17, сигнальный вход которого соединен с выходом усилителя 15, схема 18 сравнения, входы которой подключены к выводам первой 3 и второй 4 измерительных обмоток, первый 19 и второй 20 сумматоры, первые входы которых соединены с образцовой мерой 13, а вторые соответственно - с первой 5 и 6 и второй 11 и 12 парами индикаторных обмоток, нервый 21 и второй 22 noporoBf: ie элементы, входы которых соединены соответственно с выходами первого 19 И второго 20 сумматоров, элемент ИЛИ 23, входы которого подключены к выходам сумматоров 21 и 22, второй выпрямитель 24, включенный на выходе элемента ИЛИ 23, инвертор 25, включепный между выходом выпрямителя 24 и управляющим входом ключа 17, резистор 26, включенный между выходом выпрямителя 24 и выходом ключа 17, и выходная шина 27, соединенная с выходом ключа 17.
Конструктивно трансформаторный преобразователь переменхений состоит из якоря 28, иервого сердечника 29 со стержнями 30, на
0
5
0
5
котором расноложена обмотка 3 и 31, на котором расположена обмотка 2 и 32, на котором расположена обмотка 4, второго сердечника 33 со стержнем -34, на котором расположена обмотка 9, стержня 35, на котором расноложена обмотка 8, и стержня 36, на котором расноложена обмотка 10, обмотки 5, 6 и 11, 12 расположены между стержнями соответственно 30-32 и 34-36.
Устройство работает следующим образом.
В изображенном (фиг. 2) положении якоря 28, выполненного в форме параллелепипеда, его геометрический центр совмещен с началом неподвижной системы координат О.
0
0
0
5
луг, где X - ось контролируемых перемещений, у и Z - оси нерабочих поперечных смещений. Верхняя (фиг. 2) грань якоря 28 образует с торцами первого 29 и второго 33 сердечников номинальный зазор 5.
Цепь, состоящая из пос,яедовательно включенных нервой 2 и второй 8 обмоток возбуждения, а также образцовой меры 13, занитывается переменным напряжением с ностоянной амплитудой и частотой, прикладываемым к щине 14 питания относительно общей щины.
По этой цепи протекает переменный ток
IB /21з51п(ш + ф,
где IB -действующее значение тока xjJ 2Srf;
t - время;
U.i - фаза, определяемая соотношением суммарной индуктивности Les первой 2 и второй 8 обмоток возбуждения и активных сопротивлений указанных обмоток, а также активного сонротивления R образцовой меры 13.
Якорь 28 образует с первым 30 и вторым 31 стержнями первого сердечника 29 зазоры магнитной нроводимости G.,, со вторым 31 и третьим 32 стержнями зазоры магнитной проводимости 0,2, с четвертым 34 и пятым 35 стержнями второго сердечника 33 зазоры магнитной нроводимости Gji, с пятым 35 и шестым 36 стержнями зазоры магнитной проводи.мости GSZ . Магнитная проницаемость материалов сердечников 29 и 30 и якоря 28 намного превышает магнитную проницаемость воздуха, поэто.му практически величина Он является магнитной проводимостью цепи первой измерительной обмотки 3, величина - магнитной проводимостью цепи второй измерительной ки 4, величина Gj - магиитной - . ,ui- мостью цепи третьей измерительной обмотки 9 и величина GZZ - магнитной проводимостью цепи четвертой измерительной обмотки 10.
За исходные положения якоря 28 приняты такие, при которых его геометрический центр (центр параллелепипеда) имеет координату X О, т. е. расположен в точках плоскости О, . Перемещения центра якоря 28 вправо относительно плоскости Оуг соответствуют правому (0«.x« + Xi-), а перемещения влево - левому () поддиапазонам преобразования. Зависимости магнитных проводимостей G,,, 0,г , G, , Gza от координат х, оси контролируемых перемещений в преде.тах диапазона преобразования -Xj.x -f Xp имеют линейный характер.
Расс.мотрим перемещения якоря 28 вдоль оси X при каком-либо постоянном значении координаты Z const его центра, например при Z О, когда зазор S, образуемый верхней гранью якоря 28 и торцами сердечников 29 и 33 равен номинальному 6 o.
Если из указанного исходного положения якорь 28 перемещается строго вдоль оси х вправо (движение центра якоря 28 происходит по прямой (х, у 0, Z 0), то зазоры, образованные якорем 28 с третьим 32 и щестым 36 стержнями, уменьщаются, а зазоры, образованные якорем 28 с первым 30 и -четвертым 34 стержнями, увеличиваются. Следовательно, величины проводимостей G,, возрастают линейно в пределах диапа
зона преобразования, а ве.чичипы проводимости G,i, G убывают. При движении якоря 28 влево по ocii .ч указанного исходного положения .-i| i;iKTep изменепия данных проводимостей li июпяется на обратный, чему соответств. г .;; {viCiieHHe на 180° фазы выходного н;и1| )Яже1П1я двух последовательно включепн1 1х пар измерительных обмоток 3 4, 9 и 10. Симметричность расположения якоря 28 относительно сердечников 29 и 33 при отсутствии смещений его центра вдоль оси у обусловливает справедливость равенств: G,, , G,2. Gjj для рассматриваемого случая пере.мепления центра якоря 28 по прямой (х, у О, Z const -- 0).
При этом суммарная индуктивность обмоток 2 и 8 в пределах диапазона преобразования остается неизменной. Действующее значение 1 тока в цепи обмоток 2 и 8 возбуждения также постоянно.
Если якорь 28, сохраняя координату своего центра Z const О, сначала с.мещается из положения (х О, у О, z 0) вдоль оси (и тогда значение у становится отличным от нулевого), а зате.м из этого нового исходного положения, показанного на фиг. 2 щтриховым контуром (), начинает движение вдоль оси X по линии (х, , z const 0), то в пределах диапазона преоб- разования значения магнитных проводимостей GI,, Gi2 увеличиваются, а значения .магнитных проводимостей Gg,, уменьщаются сравнительно с их же значениями (для одинаковых координат х) при расс.мотрен- ном движении якоря 28 по прямой (х, у О, z const 0). Такой характер приращений магнитных проводимостей обусловлен те.м.
0
5
0
5
0
5
0
5
5
что в случае смещения у О центра якоря 28 (фиг. 2) якорь 28 приб л41жается к первому сердечнику 29 и удаляется от второго сердечника 30.
Поскольку приращения слагаемых в суммах магнитных проводимостей (G,, +G.), (Gi2 -f Ga2), для выходного напряжения двух пар измерительнь х обмоток имеют разные знаки, то сами значения указанных су.мм проводимостей в пределах диапазона преобразования стабилизированы, т. е. не зависят от нерабочих смещений якоря 28 вдоль оси у, когда .
Аналогично при нерабочих смещениях, якоря 28 только вдоль оси у. когда (z const 0), су.ммы магнитных проводимостей (GI, + G,), (Gii + Gjj) также стабилизированы относительно таких нерабочих смешений.
Таким образом, выходные сигналы последовательно соединенных первой и второй пар измерительных обмоток 3, 4 и 9, 10 являются стабилизированными по уровню Un относительно нерабочих смещений якоря 28 вдоль оси у в иределах диапазона преобразования.
Ввиду упомянутой разнозначности приращений .магнитных проводимостей оказы- вается стабилизированным также значение суммарной индуктивности обмоток 2 и 8 возбуждения, а в.месте с ни.м и действующее значение Ig тока в цепи об.моток 2 и 8 возбуждения, в результате чего напряжение на управляющем входе усилителя 15 поддерживается неиз.менным и коэффициент усиления усилителя 15 не корректируется. Но поскольку напряжение Un стабилизировано по отно- щению к нерабочим смеп1енпя.м якоря 28 вдоль оси у (при z const 0), никакой коррекции коэффициента усиления в данном случае и не требуется.
Полностью аналогично изложенному происходит формирование выходного сигнала двух последовательно соединенных пар измерительных обмоток 3, 4, 9 и 10 и при любых постоянных -значениях координаты z из зоны допустимых нерабочих смещенш якоря 28, движущегося вдоль оси х, причем это движение сопровождается нepaбOчи и сме- щения.ми вдоль оси у. Сум.мы проводи.мос- тей (G,, +G,,, ), (Gi2 + Cijj) для движения якоря 28 вдоль оси х с постоянными координатами z const его центра имеют соответственно стабилизированные значения.
Величина напряжения LV (как и для расс.мотренно1 о вьине частного случая z 0) не зависит от нерабочих смещений якоря 28 вдоль оси у.
При изменении координаты z центра якоря 28, а следовательно, и зазора 6 между верхней гранью якоря 28 и обрап енными к нему торцами сердечников 29 и 33, величины магнитных проводимостей G,,. G,. Gj, , Gjs
получают приращения одного знака; при уве личении зазора 6 сравнительно с его номинальным значением § () эти проводимости уменьшаются, а при уменьн1ении зазора 8o() - увеличиваются. Соответственно изменяются общие магнитные нроводимости сердечников 29 и 33, суммарная индуктивность Lis обмоток 2 и 8 возбуждения, ток ъ, а также величина выделяемого на образцовой мере 13 переменного напряжения Up , ie Ro, которое преобразуется первым выпрямителем 16 в сигнал постоянного напряжения, регулирующий коэффициент усиления усилителя 15, с увеличением зазора 5 (5, ), когда уровень сигнала Un на входе усилителя 15 снижается, а ток возрастает повышение напряжения Up 1в-Н„ ведет к возрастанию коэффициента усиления усилителя 15; уменьшение зазора ( , ) сопровождаемое соответственным уменьшением значений тока 1в и напряжения UP, ведет к снижению коэффициента усиления усилителя 15. В результате крутизна преобразования координаты X якоря 28 в выходной сигнал усилителя 15 поддерживается постоянной при нерабочих смещениях якоря 28 вдоль оси Z. ,
Прохождение центра якоря 28 через исходное положения, определяемые совокупностью точек плоскости Оу (х 0), изме- пяет знак разностей (G,, -О, ), (Gzi -Gja), соответственно при этом меняется на 180° фаза выходных напряжений первой и второй пар измерительных обмоток 3, 4 и 9, 10. В исходных положениях якоря 28 Он О,г ввиду симметричности расположения якоря. 28 для X О относительно стержней как первого 29, так и второго 33 сердечников.
Схема 18 сравнения реагирует на различие индуктивностей первой 3 и второй 4 измерительных обмоток (указанные индуктивности пропорциональны соответственно значениям G,, , G). Поэтому при нахождении якоря 28 в левом поддиапазоне преобразования схема 18 сравнения выдает напряжение одной, например, отрицательной полярности, а при переходе якоря 28 в правый поддиапазон ,- - напряжение другой (положительной) поляр ности, что позволяет получить с двух выходов, а именно с выхода усилителя 15 и с выхода схемы 18 сравнения однозначную информацию о положении якоря 28 в пределах общего диапазона преобразования -Хг х + х.
Таким образом, устройство осуществляет стабилизацию крутизны преобразования координаты X якоря 28 при его нерабочих смещениях вдоль оси у и компенсацию отклонений крутизны преобразования от поминальной нри нерабочих смещениях якоря 28 вдоль оси Z. Тем самым в пределах диа0
5
0
5
0
5
0
5
0
пазона преобразовапия обеспечивается однозначное - с учетом в выходно.м состоянии схемы 18 сравнения смены на 180° фазы напряжения U при переходе центром якоря 28 исходных положений х О - соответствие величины выходного сигнала усилителя 15 координате х центра якоря 28, которое не нарущается нерабочими смешениями якоря 28, происходящими в любых направлениях плоскостей, перпендикулярных (поперечных) оси х контролируе.мых перемещений.
Зона преобразования, ограничиваемая пределами допустимых значений поперечных смещений якоря 28, определяет значения нерабочих смещений вдоль положительного и отрицательного направлений оси у, а также вдоль отрицательного направления оси Z (нерабочие смещения якоря 28 в положительном направлении оси z ограничиваются самими сердечниками 29 и 30, а также не показанными на чертежах элементами конструкции, обеспечивающими крепление и жесткое взаимное смещение сердечников 29 и 33 вдоль оси у и объединяющими трансформаторные датчики 1 и 7 в едином корпусе), при которых устройство сохраняет нормальную работоспособность, в частности сохраняет линейность зависимости своего выходного сигнала от преобразуемых перемещений якоря 28, а также требуемую чувствительность преобразования.
Фиксация выхода якоря 28 за допустимые пределы зоны преобразования осуществляется следующим образом.
Первый 19 и второй 20 сумматоры производят сложение величины напряжения Up, выделяемого па образцовой мере 13 соответственно с выходным напряжением первой пары индикаторных обмоток 5 и 6 и с выходным напряжением второй пары индикаторных обмоток 11 и 12.
Если значения координат нерабочих смещений центра якоря 28 находятся в допустимых пределах, например если нерабочие смещения полностью отсутствуют (у 0, z 0), то напряжение iJ Up + ннл,1 Uzo Up + UHHAI на выходах соответственно первого 19 и второго 20 сумматоров не превышают уровня срабатывания первого 21 и второго 22 пороговых элементов. Соответственно на выходах пороговых элементов 21 и 22, а также на выходах элемента ИЛИ 23 и второго выпрямителя 24 устанавливаются сигпалы низкого (нулевого) уровня, а на выходе инвертора 25 - сигнал высокого (единичного) уровня, воздействующий на управляющий вход ключа 17 и поддерживающий ключ 17 в замкнутом состоянии. В результате выходной сигнал переменного напряжения усилителя 16, несущий информацию о положении якоря 28, через за.мкнутый ключ 17 поступает на выходную шину 27.
Когда значения координат нерабочих смещений не превышают допустимые, выходной сигнал преобразователя в виде переменного напряжения выдается по выходной шине 27 (относительно общей щины устрой- ства).
Отклонение центра якоря 28 от оси z в направлении возрастания положительных значений координаты у (т. е. влево от исходного положения по фиг. 2 - в направлении второго сердечника 33) ведет к воз- растанию уровней сигнала иинд2 на согласно включённых третьей 11 и четвертой 12 индикаторных обмотках второго трансформаторного датчика 7. Если при этом отклонении сама координата не меняется z const, то величины тока IP и напряжения Up на образцовой мере 13 стабилизированы. Те.м не ме- чее за счет возрастания сигнала UHHUZ напряжение U22 на выходе сумматора 20 также возрастает и при достижении центром якоря 28 границы зоны допустимых (по оси у) нерабочих смецдений амплитуда сигнала U:;P превышает уровень срабатывания Ur. второго порогового элемента 22. Временным интервалам указанного превы- сигналом значения U соответ- ствует появление на выходе второго порогового элемента 22 напряжения высокого (единичного) уровня, т. е. прямоугольных и.мпульсов, поступающих через элемент ИЛИ 23 на вход второго выпрямителя 24, на выходе которого устанавливается пос- тояпное напряжение высокого уровня, соответствующего логической единице. Иа ВЬЕ- ходе инвертора 25 при этом устанавливается напряжение низкого уровня, соответствующее логическому нулю и переводящее ключ 17 в разо.мкнутое состояние; поступление пе- ре.менного напряжения от усилителя 15 на выходную шину 27 прекращается. В то же вре.мя на выходную шину 27 с выхода второго выпрямителя 24 через резистор 26 подается относительно общей шины устройства постоянное напряжение высокого (единичного) уровня, сигнализирующее о выходе якоря 28 за допустимый предел нерабочих смещений в направлении возрастания положительных значений координаты у.
При рассмотренном движении якоря 28
в положительном направлении оси у напряжение на выходе первого су.мматора 19 убывает, поскольку из-за удаления (для ) якоря 28 от первого сердечника 29 снижается напряжение на первой паре соглас- но включенных первой 5 и второй 6 индикаторных обмоток.
Если центр якоря 28 отклоняется от одного из своих исходных положений (на плоскости Оу2, X 0) в сторону возрастания отрицательных значений координат (вправо, . 2), приче.м z const, то напряжение UHHAT в первой паре согласно включенных первой 5 и второй 6 индикаторных обмоток возрастает, а напряжение второй пары индикаторных обмоток 11 и 12. убывает, так как якорь 28 приближается к первому сердечнику 29 и удаляется от второго сердечника 33. Поскольку смещений по оси z не происходит, z const, ток ip и напряжение UP остаются постоянным по амплитуде. При достижении центром якоря 28 правой границы допустимых значений нерабочих смещений по оси у напряжение Up + начинает пре- выщать по амплитуде уровень срабатывания и„ первого элемента 21, что приводит к появлению на выходе порогового элемента 21 импульсной последовательности, аналогичной рассмотренной выще на выходе второго порогового элемента 22 для движения якоря 28 влево по оси у (тогда значения Un достигает амплитуда сигнала ). На выходе второго выпрямителя 24 появляется постоянное напряжение высокого (единичного) уровня, которое через инвертор 25 воздействует на управляющий вход ключа 17; выходное напряжение низкого уровня инвертора 25 переводит ключ 17 в разомкнутое состояние. Постоянное напряжение высокого уровня, соответствующего логической единице, с выхода второго вынрямителя 24 через резистор 26 поступает на выходную шину 27 и таким образом при выходе якоря 28 за пределы допусти.мых значений в направлении возрастания отрицательны.ч значений координаты у, предлагае.мое устройство заменяет выдачу по выходной тине 27 переменного напряжения (от усилителя 15) выдачей постоянного напряжения высокого уровня (от второго выпрямителя 24.
При нерабочих смещениях якоря 28 в сторону возрастания зазора 6 (), т. е. в сторону вывода якоря 28 из зоны преобразования, уровни сигналов всех индикаторных обмоток 5, 6, 11 и 12 трансформаторных датчиков 1 и 7 снижаются. Однако такие нерабочие смещения ведут к возраста|щю тока ig в цепи обмоток 2 и 8 возбуждения и к возрастанию напряжения Ur- i,. R, на образцовой мере 13. Подбором соотношения числа витков индикаторных обмоток 5, 6, 11 и 12 (все индикаторные обмотки имеют одинаковые между собой числа витков, сопротивления R „ и числа витков обмоток 2 и 8 возбуждения) легко обеспечивается превышение чувствительности тока ig и нанря- жения Up над чувствительностью напряжений и „,.„,,, к смещениям якоря 28 вдоль оси z: указанное превышение обеспечивается, в частности, за счет подбора достаточно большого значения R. Тогда нерабочие смещения якоря 28 в сторону его вывода из зоны преобразования (вниз по фиг. 2) ведут к общему росту напряжений U,, , U-,- на выходах соответственно первого 19 и вто9
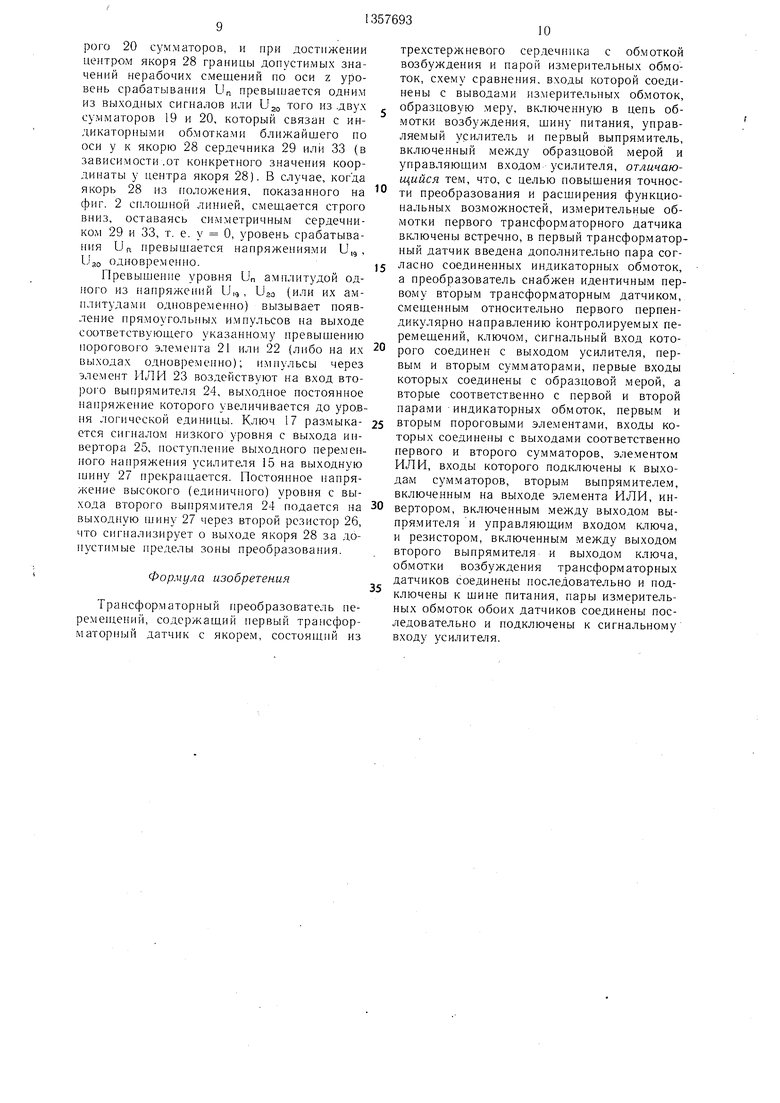
рого 20 сумматоров, и при достижении центром якоря 28 границы допустимых значений нерабочих смендений по оси z уровень срабатывания Un превышается одним из выходных сигналов или Uao того из .двух сумматоров 19 и 20, который связан с индикаторными обмотками ближайшего по оси у к якорю 28 сердечника 29 или 33 (в зависимости.от конкретного значения координаты у центра якоря 28). В случае, когда якорь 28 из положения, показанного на фиг. 2 сплошной линией, смещается строго вниз, оставаясь симметричным сердечником 29 и 33, т. е. у О, уровень срабатывания Un превышается напряжениями U,, , I- ao одновре.менно.
Превышение уровня Un амплитудой одного из напряжений U,, , U aa (или их амплитудами одновременно) вызывает иояв- ление прямоугольных импульсов на выходе соответствующего указанному превышению порогового элемента 21 или 22 (либо на их выходах одновременно); импульсы через элемент ИЛИ 23 воздействуют на вход второго выпрямителя 24, выходное постоянное напряжение которого увеличивается до уровня логической единицы. Ключ 17 раз.мыка- ется сигналом низкого уровня с выхода инвертора 25, ноступление выходного переменного напряжения усилителя 15 на выходную шину 27 прекраплается. Постоянное напряжение высокого (единичного) уровня с выхода второго вьшрямителя 24 подается на выходную 1нину 27 через второй резистор 26, что сигнализирует о выходе якоря 28 за допустимые пределы зоны преобразования.
Формула изобретения
Трансформаторный преобразов атель пе- ремен;ений, содержащий первь й трансформаторный датчик с якорем, состоящий из
1357693
10
трехстержневого сердеч И1ка с обмоткой возбуждения и парой из.мерительных обмоток, схему сравнения, входы которой соединены с выводами измерительных обмоток, образцовую меру, включенную в цепь обмотки возбуждения, щину нитания, управляемый усилитель и первый выпрямитель, включенный между образцовой мерой и управляющим входом усилителя, отличающийся тем, что, с целью повышения точности преобразования и расширения функциональных возможностей, измерительные обмотки первого трансформаторного датчика включены встречно, в первый трансформаторный датчик введена дополнительно пара согласио соединенных индикаторных обмоток, а преобразователь снабжен идентичным первому вторым трансформаторным датчиком, смещенным относительно первого перпендикулярно направлению контролируемых перемещений, ключом, сигнальный вход которого соединен с выходом усилителя, первым и вторым сумматорами, первые входы которых соединены с образцовой мерой, а вторые соответственно с первой и второй парами индикаторных обмоток, первым и
вторым пороговыми элементами, входы которых соединены с выходами соответственно первого и второго сумматоров, элементом ИЛИ, входы которого подключены к выходам сумматоров, вторым выпрямителем, включенным на выходе элемента ИЛИ, инвертором, включенным между выходом выпрямителя и управляющим входом ключа, и резистором, включенным между выходом второго выпрямителя и выходом ключа, обмотки возбуждения трансформаторных датчиков соединены последовательно и под
ключены к щине питания, пары измерительных обмоток обоих датчиков соединены последовательно и подключены к сигнальному входу усилителя.
бидА
г
29
11
-32
28
Фиг. г
Фиг.З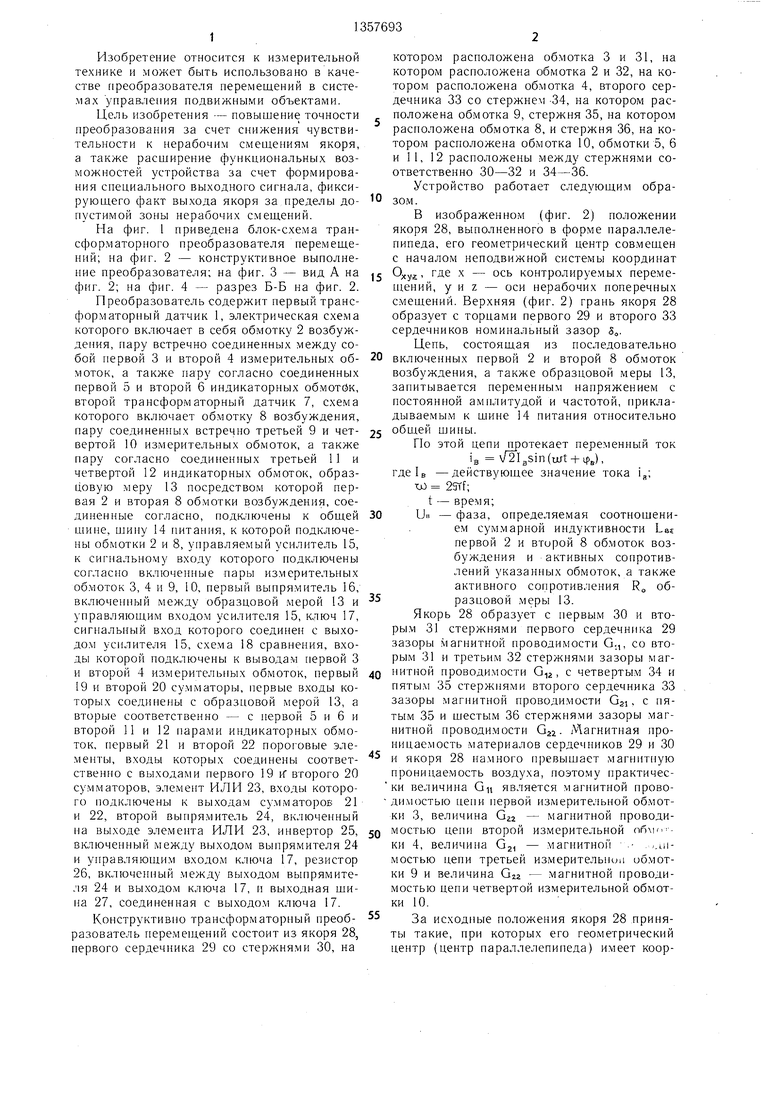
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования перемещений | 1983 |
|
SU1167417A1 |
| Преобразователь перемещений в код | 1988 |
|
SU1559406A1 |
| МНОГОПЛЕЧИЙ ТРАНСФОРМАТОРНЫЙ МОСТ ПЕРЕМЕННОГО ТОКА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРЕХЭЛЕМЕНТНЫХ ДВУХПОЛЮСНИКОВ ПО ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ GLC-СХЕМЕ И СПОСОБ ЕГО УРАВНОВЕШИВАНИЯ ПО ТРЕМ ПАРАМЕТРАМ | 1999 |
|
RU2149413C1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1832177A1 |
| КОНДУКТОМЕТР | 2014 |
|
RU2549246C1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| ЧАСТОТНО-НЕЗАВИСИМЫЙ МНОГОПЛЕЧИЙ ТРАНСФОРМАТОРНЫЙ МОСТ ПЕРЕМЕННОГО ТОКА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРЕХЭЛЕМЕНТНЫХ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНЫХ RC-ДВУХПОЛЮСНИКОВ | 2000 |
|
RU2161314C1 |
| Устройство для контроля многокомпонентных перемещений | 1980 |
|
SU896657A1 |
| СОЛЕМЕР | 2006 |
|
RU2365909C2 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП | 1995 |
|
RU2085932C1 |
О
35
ФИ2Л
| Датчик линейных перемещений | 1974 |
|
SU540129A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения перемещений | 1981 |
|
SU994906A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещения в электрический сигнал | 1977 |
|
SU724914A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
