Изобретение относится к технике измерительного преобразования перемещений с применением электромагнитных чувствительньсх элементов и может быть использовяно в системах управле- 5 кия, контроля и измерения различных
физических величин.
Известно устройство для преобра.эования перемещений, содержащее источникпитания, ,якорь, чувстви- to тельные элементли обмотки которых
включены в Mocifely.Ki схему, содержащую также компенса11ионные элементы TljОднако .HdsfecTHoe устройство характеризуется низкой точностью 5 преобразования, обусловленной наличием значительной чувствительности к нерабочим смещениям якоря.
Наиболее близким к изобретению по технической сущности является устрой-20 ство для преобразования перемещений, содержащее якорь, два чувствительных элемента с обмотками, последовательно включенные источник питания и управляемый усилитель, выход которого под-25 ключен к последовательно-встречно соединенным первой и второй обмоткам, вычислительный блок сравнения, один из входов которого подключен к источнику опорного напрялсения, другой - к зо обмотке чувствительного элемента, а выход - к управляющему уси.пителю 2, 1едостаток данного устройства заключается в низкой точности преобразования, что обусловлено наличием значительной чувствительности к нерабочим смещениям якоря.
Цель изобретения - повышение точности преобразования за счет снижения чувствительности к нерабочим смещениям д якоря.
Поставленная цель достигг1ется тем, что устройство для преобразования
.перемещений, содержащее якорь, два чувствительных элемента с обмотками, 4S последовательно включенные источник питания и управляемый усилитель, выход которого подключен к последовательно-встречно соединенным первой и второй обмоткам, блок сравнения 50 и вычислительный блок, снабжено третьим чувствительным элементом с третьей обмоткой, включенной последовательно-встречно с.второй обмоткой, вторым якорем, смещенньпч в направле- 55 НИИ преобразуемого перемещения относительно первого якоря, блоком отбора и запоминания аналогового сигнала.
информационные входы которого подключены к первой и третьей обмоткам, а выходы - к nepBONfy входу блока сравнения, второй вход которого подключен к второй обмотке, счетчиком, вычитаю 11 й вход которого подключен к выходу блока сравнения, а выход к входу вычислительного блока, тактовым генератором, вг,1ход которого подключен к установочному входу счетчик генератором линейно изменяющегося напряжения, включенным между выходом тактового генератора и управляющим входом усилителя, и элементом задержки, включенным между выходом тактово генератора и управляющим входом счетчик а.
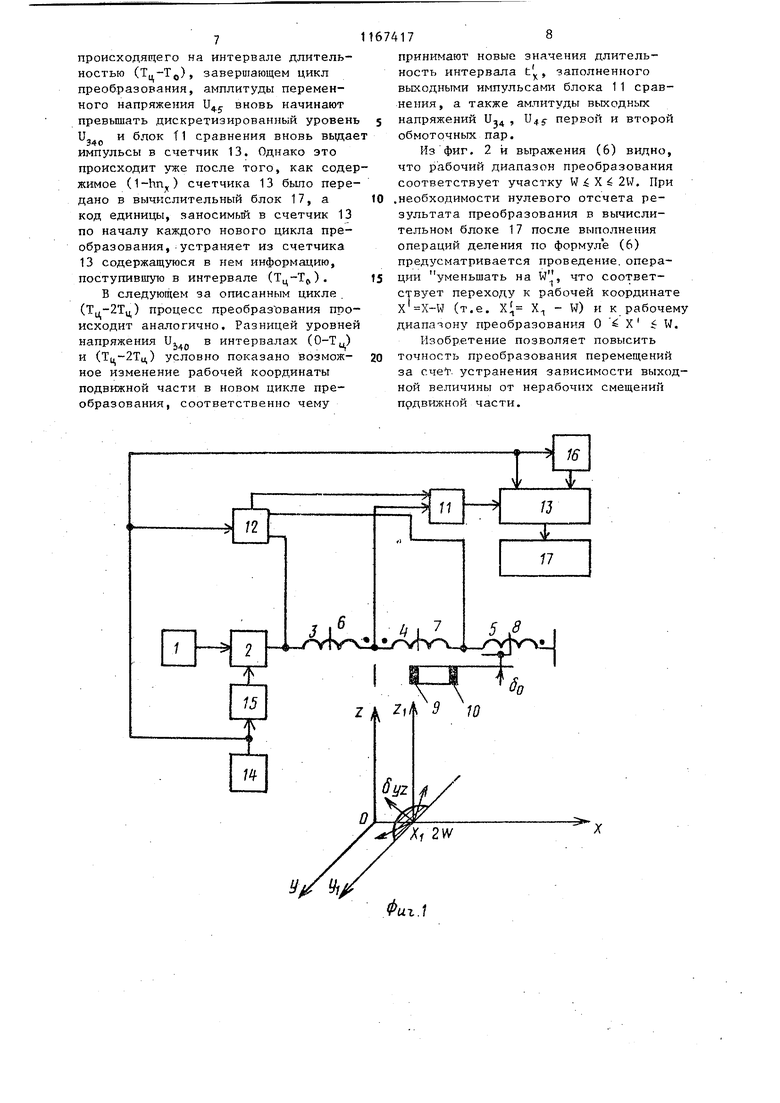
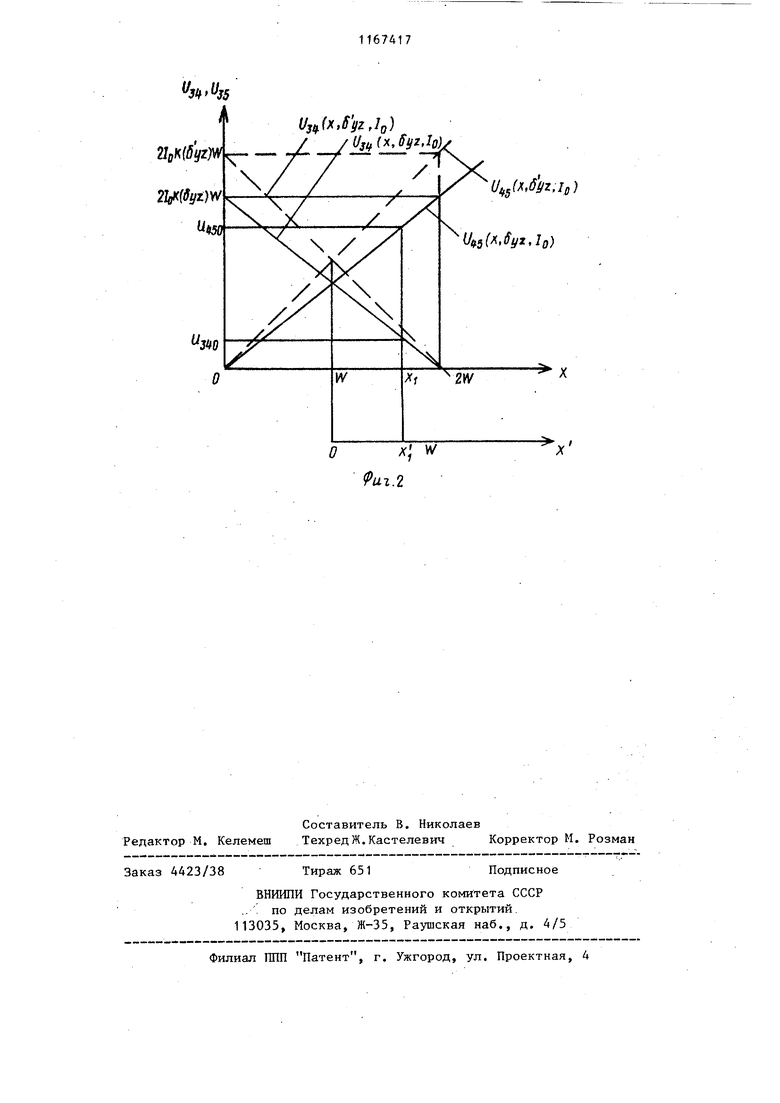
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг. 2 зависимости уровней выходных разностньк сигналов обмоточных пар от рабочего перемещения х.
Устройство содержит источник 1 питания переменного тока, которглй через управляе№.ш усилитель 2 связан с последовательно-встречно включенными первой 3, второй 4 и третьей 5 обмотками соответственно первого 6, второго 7 и третьего 8 чувствительных элементов с неподвижны -ш ферромагнитными сердечниками. Подвижная часть устройства состоит из первого 9 и второго 10 якорей, выполненных их магнитопроводного материала, скрепленных перемлчкой, обеспечивающей их взаимное смещение в направлении пpeoбpaзye oгo перемещения, обмотки 3 и 4 образуют первую обмоточную пару, а обмотки 4 и 5 - вторую. Устройство содержит также блок 1t сравнения, блок 12 отбора и запомина})ия ансологового сигнала, информационные входы которого соединены с первой обмоточной парой 3 и 4 а выход подключен к первому входу блока 11 сравнения, к втopo fy входу которого подключена вторая обмоточна пара 4 и 5, счетчик 13, вычитающий вход которого подключен к выходу блока 11 сравнения, тактовый генератор 14, подключенный к управляющему входу блока 12 отбора и запоминания аналогового сигнала, генератор 15 линейно изменяющегося напряжения, подключенный входом к выходу генератора 14, элемент 16 задержки, включенный между выходом генератора 14 и управляющим входом счетчика 13, и вычислительный блок 17, под ключ енный к выходу счетчика 13. Устройство работает следующим образом. Амплитуду Ij, переменного тока 2 I2c:os2-ft (f-частота тока, питающего обмотки 3-5) периодически изменяют путем подачи на управляющий вход управляемого усилителя 2 выходного напряжения . генератора 15, синхронизируемого тактовым генератором 14, соответственно изменяется и напряжение переменного тока, прикладьшаемое к обмоткам 3-5, Выходным импульсом и генератора 14 начинают очередной цикл преобразования длительностью Тц. В пределах рабочего хода длительностью Т, генератора 15 амплитуда 1 тока, питаюп1его обмотки 3-5, линейно убывает (соответственно линейному изменению выходного напряжения генератора 15). l2(t)g(To-t), О с А TO Г) где g - .коэффициент пропорциональности, определяемый элеменTai tH схем источника 1 питания, генератора 15 и управляемого усилителя 2. В момент t О начала очередного цикла преобразования 1,(0) Отсчет рабочей координаты х подвижной части привязан к положению первого якоря 9. Для определенности величина взаимного смещения подвижно части первого 9 и второго 10 якорей показана на фиг. 1 равной расстоянию от центра пары чувствительньк элемен тов 6 и 7 до центра чувствительного элемента 7, а значение х О, зависящее от конкретных соотношений размеров и значений электромагнитных параметров чувствительных элементов 6-8, от расстояний между ними, а также между первым 9 и вторым 10 яко рями, отнесено к центру пары, содержащей первый б и второй 7 чувствительные элементы (фиг. 1). Работа устройства рассматривается для координаты х подвижной части. В момент, когда ток имеет максималь ную амплитуду (,, с выводов первой обмоточной пары 3 и 4 снимают разность напряжений переменного тока С амплитудой V. на встречно включенных обмотках 3, 4, ас выво-дом второй обмоточной пары 4,5 - раз ность напряжений переменного тока амплитудой на обмотках 4 и 5. При этом, как видно из схемы включения обмоток 3-5, а также расположения чувствительных элементов 6-8 и якорей 9 и 10 (фиг. 1), первая и вторая обмоточные пары имеют обратные одна относительно другой зависимости своих выходных разностных напряжений от перемещения подвижной части. В интервале О х 2W линейной апроксимации эти зависимости имеют вид Vg. -IKX4-2I KW . (3) - 1дКХ , координата подвижной части, где W соответствующая равенству выходных напряжений первой и второй обмоточных пар при одинаковых значениях питающего их тока, т.е. для Х W справедливо равенство 35 К - коэффициент пропорцлональности, определяемый размерами чувствительных элементов 6-8, якорей 9, 10,а также их электромагнитными свойствами. Величина коэффициента К K(i/vz) зависит о поперечных смещений подвижной части, изменяющих номинальный зазор (Гр между неподвижными сердечниками чувствительных элементов 6-8 Т якорями 9 и 10. Следовательно, согласно выражениям (2), (3), напряжения Uj , 1145- и юс амплитуды являются зависимыми не только от величи гы рабочих перемещений и питaюБ eгo тока, но и от поперечных смещений подвижной части V,, (X, сЛ., Ь)-, V45 (X, , It). 34 « VZ Зависимости V Ip) при фиксированном (X, . 45 yz нерабочем смещении «(z const графически изображены на фиг. 2 сплошными линиями; штриховыми линиями показано, что при изменении (для определенности соответствующем уменьшению зазора между чувствительньми элементами 6-8 и якорями 9, 10) величины поперченого смещения (, Х12 положение указанных графиков меняется. Поперечные нерабочие смеения могут происходить в любых направлениях любых показателей, перпендикулярньк рабочей оси х например,, плоскости (2 ; X,, х). Поскольку в момент начала очеред ного цикла преобразования амплитудное значение питающего тока la максимально, наибольшими для дан ной рабочей координаты х, (а также для имеющегося в данный момент нера бочего поперечного смещения tf ПОДВ1-ШНОЙ части) оказываются и уров ни , cAvjz, Iо) и34о 1 (15 , IQ) и45о(ФиГ. 2). Выходрюе напряжение первой обмоточной пары и дискретизируют, подавая на управляющий вход блока вьпсодной импульс тактового генератора 14, когда величина амплитуды питающего тока 1 имеет максимальное значение, Дискретизированный уровень поддерживают затем на вьпсоде блока 12 или что то же само на первом входе блока 11 сравнения неизменным. Это постоянное напряжение сравни вается с переменным выходным напряжением 1)45 второй обмоточной пары, подаваемым на второй вход блока И 1 сравнения. Поскольку в момент дискретизации амплитуда ) выходного напряжения второй обмоточной пары превьпиает постоянный уровень и,,.д (фиг, 2) для всех Х 7 W (в точке Х W имеет место равенство s } Р линейном уменьшении выходного напряжения ге нератора 15 и соответствующем ему снилсении амплитуды питающего тока Ij в интервале времени от t О до момента tj сравнения ,) U,(.Q блок 1 1 сравнения выдает импульсные U,, с частотой f питающего тока ij. Таким образом результат сравнен выделяется в В1аде временного интер вала t, заполненного импульсами пх Т, где Т2 Vf - период тока, iij число импульсов, поступивш ОТ блока 11 сравнения на вход счетчика 13 от момента дискретизации до момента сравнения t. После того, как амплитуда станет меньше дискретизированного напряжения. , изменений выходны состояний блока 11 сравнения происходить уже не будетJ и поступление импульсов в счетчик 13 прекратится. Если подвижная часть находится в положении х W, то в момент t о уровни и и уже оказываются равными друг другу, и их сравнение происходит одновременно с дискретизацией напряжения U, , т,е, t О и п О, Равенство подаваемых на входы блока 11 сравнения напряжений Ид-ц и 1)4.5- момент t О выражается с помощью соотношений (2), (3) следующим образом l2(t) k ( сЛ,,.,)х -Ik(tr;,)x + +2I,k( c)W, откуда, используя выражения (1) и (4), определяют величину координаты подвижной части -W 21о - 1,(.)41,-- Sll . Ti постоянная величина, выражаемая через известные значения TQ, Т, Число выходных импульсов п блока 11 Сравнения подсчитывается с помощью счетчика 13, Поскольку для определения координаты подвижной части необходимо не просто подсчитать это чис ло, а произвести арифметические операции, предусмотренные выpaжe иeм (6), импульсы от блока 11 сравнения подают на вычитающий вход счетчика 13, причем начальный момент очередного цикла преобразования, соответствующий выдаче выходного импульса тактового генератора 14, а счетчик 13 по его установочному входу заносят код единицы. После окончания рабочего хода генератора 15 от элемента 16 задержки, время задержки фронта входного импульса которого составляет Т, на управляющий вход счетчика 13 поступает сигнал Ц занесения содержимого счетчика 13 - кода (1-hn) в вычислительный блок J 7,, где выполляется арифметическая операция деления числа W на число (1-hn ), поступившее из счетчика 13. В результате на выходе вычислительного блока 17 формируется число (код) Х координаты подвижной части по оси рабочих перемещений. Во время нелинейного нарастания выходного напряжения генератора 15 происходящего на интервале длительностью (Тц-Тд), завершающем цикл преобразования, амплитуды переменного напряжения вновь начинают превышать дискретизированный уровен Ug и блок Т1 сравнения вновь выда импульсы в счетчик 13. Однако это происходит уже после того, как соде жимое (1 ) счетчика 13 было пере дано в вычислительный блок 17, а код единицы, заносимьй в счетчик 13 по началу каждого нового цикла преобразования, устраняет из счетчика 13 содержащуюся в нем информацию, поступившую в интервале (Тц-Т(). В следующем за описанным цикле. (Тц-2Тц) процесс преобразования про исходит аналогично. Разницей уровне напряжения Uj в интервалах (0-Тц) и (Тц-2Тц) условно показано возможное изменение рабочей координаты подвижной части в новом цикле преобразования, соответственно чему принимают новые значения длительность интервала t, заполненного выходными импульсами блока 11 сравнения , а также амлитуды выходных напряжений Uj , 1145- первой и второй обмоточных пар. Из фиг. 2 и вьфажения (6) видно, что рабочий диапазон преобразования соответствует участку W i X 2W. При необходимости нулевого отсчета результата преобразования в вычислительном блоке 17 после выполнения операций деления по формуле (6) предусматривается проведение, операции уменьшать на W, что соответствует переходу к рабочей координате (т.е. Х1( Х - W) и к рабочему диапазону преобразования О X W. Изобретение позволяет повысить точность преобразования перемещений за счег. устранения зависимости выходной величины от нерабочих смещений прдвижной части.
/S
15
I ргт
л
Г W
л
т
(, %,/,}
J4.fX.,/gJ
(x,,ij,)
(Jtn{,SyzJo)
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Трансформаторный преобразователь перемещений | 1985 |
|
SU1357693A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Способ обнаружения дефектов обмоток якоря электрической машины и устройство для его осуществления | 1989 |
|
SU1698846A1 |
| Устройство для измерения давления | 1988 |
|
SU1583770A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| Устройство для отклонения луча электронно-лучевой трубки | 1982 |
|
SU1220137A1 |
| Цифровой датчик линейных перемещений | 1990 |
|
SU1739185A1 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2344384C1 |
УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕЩЕНИЙ, содержащее якорь, два чувствительных элемента с обмотками, последовательно включенные источник питания и управляемый усилитель, выход которого подключен к последовательно-встречно соединенным первой и второй обмоткам, блок сравнения и вычислительный блок, отличающееся тем, что, с целью повьшения точности за счет снижения чувствительности к нерабочим смещениям якоря, оно снабжено третьим чувствительным элементом с третьей обмоткой, включенной последовательновстречно с второй обмоткой, вторым якорем, смещенным в направлении преобразуемого перемещения относительно первого якоря, блоком отбора и запоминания аналогового сигнала, информационные входы которого подключены к первой и третьей обмоткам, а выход - к первому входу блока сравнения, второй вход которого подключен к второй обмотке, счетчиком, вычитающим вход которого подключен к выходу блока сравнения, а выход - к входу Бичислительного блока, тактовым генератором, выход которого подключен к установочному входу счетчика, генератором линейно изменяющегося напряжения, включенным между выходом тактового генератора и управляющим входом усилителя, и элементом задержО) ки, включенным меж;1;у выходом тактового генератора и управляющим входом счетчика.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Федотов А.В | |||
| Расчет и проектирование индуктивных измерительных устройств | |||
| М., Машиностроение, 1979, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ измерения перемещений и устройство для его осуществления | 1980 |
|
SU877319A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
