113
Изобретение относится к импульсным устройствам систем автоматического упра1зления и может быть использовано для релейного, импульсного и пропер- ционального регулирования положения пьезодвигателя.
Целью изобретения является повьше- ние динамической точности и надежно- сти регулятора.
Иа чертеже представлена структурная схема импульсного регулятора по- ло}кения пьезодвигателя. ; Регулятор содержит элемент 1 сравнения, генератор 2 опорной частоты, ;релейный элемент 3, усилитель 4 мощ- ности, интегрирующий контур 5, датчик 6 производной тока, например дроссель И-, пьезодвигатель 7.
Регулятор работает следующим обра- зом.
Задагацнй сигнал через элемент 1 сравнения поступает на первый вход релейного элемента 3, на второй вход которого поступает сигнал с генерато- ра 2 опорной частоты. Репейный элемент (например, двухвходовый компаратор напряжения) осуществляет щирот- но-иютульсную модуляцию задающего сигнала. Затем модулированный задаю- |И11Й сигнал поступает на вход усилителя 4 мощности, которьй может быть построен по мостовой схеме, усиливается по мощности и подается на пьезодвига- тель 7, последовательно с которым соединен датчик 6 производной тока-. Так как пьезодвигатель 7 электричес- ки представляет собой емкость, максимальный ток, протекающий через него и элементы усилителя мощности, не .превышает значения
1„ .
где I - максимальное значение тока,
hi
протекающего через пьезодви-
гатель 7, А;
и - напряжение источника питания, В;
L индуктивность датчика 6, Гн; С - емкость пьезодвигателя 7, Ф. Последовательно соединенные датчик производной тока и пьезодвигатель представляют собой фильтр высокой частоты. Частота генератора 2 опорной частоты фильтруется этим контуром. Таким образом, на пьезо52
двигателе выделяется постоянное напряжение, пропорциональное величине задающего сигнала.
Электрически и механически параметры регулятора связаны между собой соотношениями
f
и
bNU;
.
е,
g
0
5 о Q
5
5
0
5
где f - перемещение пьезодвигате-
ля, м;
Ъ - пьезомодуль, мВ; N - число пластин пьезодвигателя;и - напряжение на пьезодвигате-
ле. В; . - емкость пь ;зодвигателя, Ф;
-ток, протекающий через пье- зодвигатель. А;
-время, с;
С i
t е,
Jj С «.
.
падение напряжения на датчике, В;
индуктивность датчика, Гн; ускорение пьезодвигателя, м/с
Из приведенных соотнощений видно, что падение напряжения на датчике 6 производной тока пропорционально ускорению пьезодвигателя . Падение напряжения на датчике производной тока е подается на вход интегриру- ющего контура 5, который выполняет две функции.
Интегрирующий контур 5 фильтрует частоту генератора. 2, вьщеляя постоянную составляющую производной от тока, и формирует частотную характеристику регулятора, обеспечивающую необходимую динамическую точность. Корректирующий сигнал с выхода интегрирующего контура 5 поступает на второй вход элемента 1 сравнения.
Для того, чтобы величина корректирующего сигнала е была достаточна для для обеспечения требуемой динамической точности регулятора, статический коэффициент передачи интегрирукщего контура должен подчиняться соотношению
к
LC К
г
L С
где К - статический коэффициент пе- редачи интегрирующего контура;
индуктивность датчика, Гн; емкость пьезодвигателя, Ф; эквивалентный статический коэффициент передачи от первого входа релейного элемента до выхода усилителя мощности.
В предлагаемом импульсном регуля- торе положения пьезодвигателя за сче введения датчика, последовательно соединенного с пьезодвигателем и параллельно с входами интегрирующего контура, выход которого соединен с вторым входом элемента сравнения, достигается уменьшение пиковых токов протекающих через элементы усилителя мощности и пьезодвигатель, что обеспечивает увеличение его надежности; за счет введения в цепь обратной свя
5 1357915
зи интегрирующего контура достигается увеличение его динамической точности. Кроме того, за счет упрощения регулятора снижаются аппаратурные затраты и уменьшаются потери мощности.
Формула изобретения
Импульсный регулятор положения пьезодвигателя, содержащий элемент сравнения, первый вход которого является входом регулятора, ВЬЕХОД соединен с первьм входом релейного элемента, второй вход которого соединен с выходом генератора опорной частоты, выход - с входом усилителя мощности, отличающийся тем, что, с целью повыщения динамической точности и надежности регулятора, в него введены датчик производной тока и интегрирующий контур, вход которого соединен с выходом датчика производной тока, включенного между выходом усилителя мощности и пьезодвигателем, выход - с вторым входом элемента сравнения.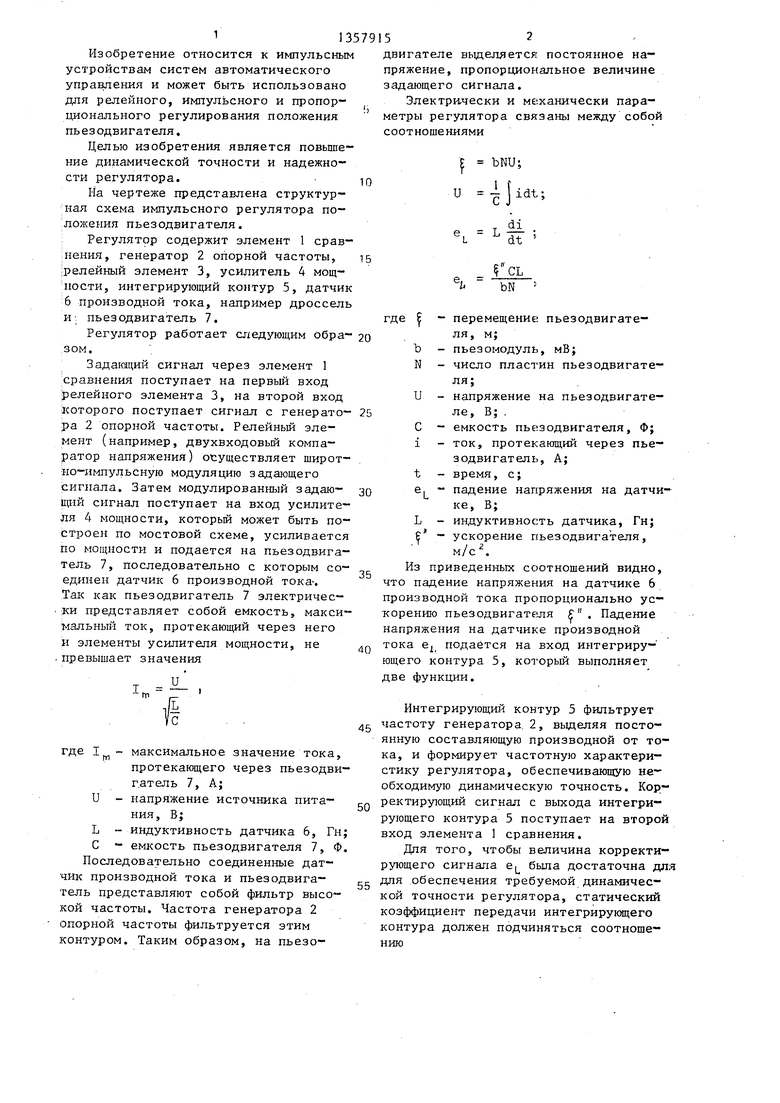
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор перемещения пьезодвигателя (варианты) | 1982 |
|
SU1023278A2 |
| Устройство управления пъезодвигателем | 1985 |
|
SU1366989A1 |
| Устройство управления пьезодвигателем | 1990 |
|
SU1737407A1 |
| Импульсный регулятор перемещения пьезодвигателя | 1986 |
|
SU1363134A1 |
| Импульсный регулятор перемещенияпьЕзОдВигАТЕля | 1979 |
|
SU847270A1 |
| Устройство для компенсации активно-гО TOKA уТЕчКи | 1979 |
|
SU851625A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Устройство для автоматической настройки тока компенсации в режиме однофазного замыкания на землю в электрических сетях карьеров | 1987 |
|
SU1467663A1 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| Вторичный регулятор топливоподачи дизель-генератора переменного тока | 1985 |
|
SU1267356A2 |
Изобретение относится к импульсным устройствам систем автоматического управления и может быть использовано для релейного, импульсного и пропорционального регулирования положения пьезодвигателя. Повышение надежности регулятора обеспечивается уменьшением пиковых токов, протекающих через элементы усилителя мощностей и пьезодвигатель, за счет.введения датчика производной тока, соединенного последовательно с пьезо- двигателем и параллельно с входами интегрирующего контура, введение которого позволяет увеличить динамическую точность регулятора. 1 ил. со сл | со
Составитель Г. Нефедова Редактор И. Шулла Техред м.ХоданичКорректоре. Черни
5997/48
Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
. по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Импульсный регулятор перемещенияпьЕзОдВигАТЕля | 1979 |
|
SU847270A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Импульсный регулятор перемещения пьезодвигателя (варианты) | 1982 |
|
SU1023278A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
