{
.-
-
- J S 9 н -j
5-3XI о U о
00
Изобретение относится к машиностроению, в частности к системам автоматического регулирования и управления различных исполнительных механизмов, применяемых, например, в прецизионной металлообработке, системах наведения и слежения, измерительных устройствах на основе оптических квантовых генераторов, Б производстве интегральных микросхем и медицинского оборудования и т.д.
Известен следящий электропривод, содержащий электродвигатель, сочлененный с подвижной платформой, якорная обмотка которого соединена с преобразователем, последовательно включенные задатчик по- ложения, сумматор, интегратор, усилитель и пьезодвигатель, соединенный свободным концом с исполнительным органом, а другим концом закрепленный на подвижной платформе, причем интерферометрический датчик положения исполнительного органа соединен выходом с вторым входом сумматора.
Недостатком такого электропривода является невысокая динамическая точность, наличие двух датчиков положения, каждый из которых должен иметь одинаковую высокую точность, превышающую точность системы в целом.
Наиболее близким к изобретению явля- ется следящий электропривод, содержащий электродвигатель, кинематически связанный с подвижной относительно основания платформой, сумматор, к входам которого подсоединены выходы задатчика и интер- ферометрического датчика положения, последовательно соединенные нелинейное звено типа зона нечувствительности и преобразователь, выход которого соединен с электродвигателем, жестко установлен- ный на платформе пьезодвигатель, соединенный с исполнительным органом и оптически связанный с интерферометриче- ским датчиком положения, усилитель, выход которого подключен к входам пьезодвигателя и нелинейного звена типа зона нечувствительности, а первый вход соединен с выходом дифференциатора, вход которого подключен к выходу интерфе- рометрического датчика положения, интег- ратор. , вход которого подсоединен к выходу сумматора, а выход связан с вторым входом усилителя,
Недостатком известного электропривода является невысокая динамическая точ- ность работы системы в переходных режимах, Кроме того, наличие интегратора на входе замкнутого контура регулирования понижает устойчивость системы в переходных режимах работы, а наличие нелинейного звена типа зона нечувствительности приводит к необходимости применения подвижной платформы, масса которой значительно превышает массу исполнительного органа и повышает склонность системы к автоколебаниям, т.е. недоиспользуются динамические возможности электродвигателя, что снижает динамическую точность и надежность системы в целом.
Целью изобретения является повышение динамической точности и увеличение надежности электропривода.
Для этого электропривод снабжен вторым сумматором, режекторным фильтром, корректирующим устройством, усилителем и компенсационным устройством, вход и выход которого соединены соответственно с выходом задатчика положения и первым входом второго сумматора, второй вход которого подключен к выходу первого сумматора, а выход - к входу корректирующего устройства, выход которого соединен с первым входом преобразователя, второй вход которого соединен с выходом датчика скорости, соединенного входом с выходом электродвигателя, выход первого сумматора соединен с входом режекторного фильтра, выход которого через усилитель подключен к входу пьезодвигателя.
На чертеже изображена блок-схема следящего электропривода.
Следящий электропривод содержит основание 1, электродвигатель 2, кинематически связанный с подвижной платформой 3, задатчик положения 4, выход которого связан с первым входом первого сумматора 5, второй сумматор 6, датчик скорости 7, пьезодвигатель 8, установленный на подвижной платформе 3, исполнительный орган 9, интерферометрический датчик положения 10 выход которого соединен с вторым входом первого сумматора 5, преобразователь 11, усилитель 12, причем пьезодвигатель 8 связан с исполнительным органом 9, интерферометрический датчик положения 10 установлен на основании 1 и оптически связан с исполнительным органом 9, выход преобразователя 11 соединен с управляющей обмоткой электродвигателя 2, усилитель 12 подсоединен к пьезодвигателю 8, выход датчика скорости 7 соединен с вторым входом преобразователя 11, а выход первого сумматора 5 связан с вторым входом сумматора 6. Кроме того, электропривод содержит режекторный фильтр 13, коменсационное устройство 14 и корректирующее устройство 15, причем вход режекторного фильтр 13 связан с выходом первого сумматора 5, вход компенсационного устройства 14 свя- зан с выходом задатчика положения 4, вход
корректирующего устройства 15 связан с выходом второго сумматора 6, выход режек- торного фильтра 13 связан с входом усилителя 12, выход компенсационного устройства 14 соединен с первым входом второго сумматора б, выход корректирующего устройства 15 соединен с первым входом преобразователя 11. Режекторный фильтр 13 имеет передаточную функцию виР2
-2+а&
компенсационда У-1р.ф.(р) --- 2,
( р + иэ Г
ное устройство 14 имеет передаточную функцию вида, V-1K.y.(p) dip2 + d2p, где р - оператор дифференцирования; di, 62 - весовые коэффициенты; шо - круговая частота механического резонанса системы пьезод- вигатель 8 - исполнительный орган 9.
Электропривод работает следующим образом, Сигнал от задатчика положения 4 поступает на вход первого сумматора 5, где алгебраически суммируется с имеющим обратный знак сигналом обратной связи по положению, поступающим от интерферо- метрического датчика положения 10. Кроме того, сигнал от задатчика положения 4 поступает на компенсационное устройство 14, формирующее сигнал первой и второй производной от задающего сигнала. Выходной сигнал компенсационного устройства 14 поступает на вход второго сумматора б, выход- ной сигнал которого поступает на корректирующее устройство 15, улучшающее устойчивость электропривода в переходных режимах работы. С выхода корректирующего устройства 15 сигнал поступает на первый вход преобразователя 11; одновременно на второй вход преобразователя 11 поступает сигнал отрицательной обратной связи по скорости от датчика скорости 7. Выходной сигнал преобразователя 11 подается на электродвигатель 2, который перемещает установленную на основании 1 подвижную платформу 3. Закрепленный на подвижной платформе 3 пьезодвигатель 8 перемещает исполнительный орган 9, координаты которого измеряются интерферометрическим датчиком
положения 10. Напряжение питания пье- зодвигателя 8 вырабатывается усилителем 12, вход которого подлючен к выходу режек- торного фильтра 13. Входным сигналом для
режекторного фильтра 13 является сигнал ошибки по положению, выработанный первым сумматором 5.
Применение предлагаемого следящего электропривода позволяет существенно повысить динамическую точность и надежность технологического оборудования и различных автоматических систем в условиях вибрации и действия высокочастотных возмущений7При отработке сложных законов управления.
Формула изобретения Следящий электропривод, содержащий преобразователь, выход которого подключен к электродвигателю, кинематически связанному с подвижной относительно основания платформой, первый сумматор, к входам которого подсоединены выходы задатчика положения и интерферометриче- ского датчика положения, жестко
установленный на платформе пьезодвигатель, соединенный с исполнительным органом и оптически связанный с интерферометрическим датчиком положения, и датчик скорости, отличающийся тем, что, с целью
повышения динамической точности и увеличения надежности, в него введены второй сумматор, режекторный фильтр, корректирующее устройство, усилитель и компенсационное устройство, вход и выход которого
соединены соответственно с выходом задатчика положения и первым входом второго сумматора, второй вход которого подключен к выходу первого сумматора, а выход- к входу корректирующего устройства, выход которого соединен с первым входом преобразователя, второй вход которого соединен с выходом датчика скорости, вход которого соединен с электродвигателем, выход первого сумматора соединен с входом режекторного фильтра, выход которого через усилитель соединен с входом пьезод- вигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1983 |
|
SU1164848A2 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2223592C1 |
| Двухканальный электропривод | 1987 |
|
SU1473060A1 |
| Двухканальный электропривод | 1989 |
|
SU1665488A1 |
| Позиционный электропривод | 1984 |
|
SU1220096A2 |
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Следящая система | 1979 |
|
SU824126A1 |
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
Изобретение относится к машинострое- нию,в частности к системам автоматического регулирования и управления различных исполнительных механизмов, применяемых, например, в прецизионной металлообработке, системах наведения и слежения, измерительных устройствах на основе оптических квантовых генераторов, в производстве интегральных микросхем и меди- цинского оборудования. Целью изобретения является повышение динамической точности и увеличение надежности электропривода. Следящий электропривод содержит основание (1), электродвигатель 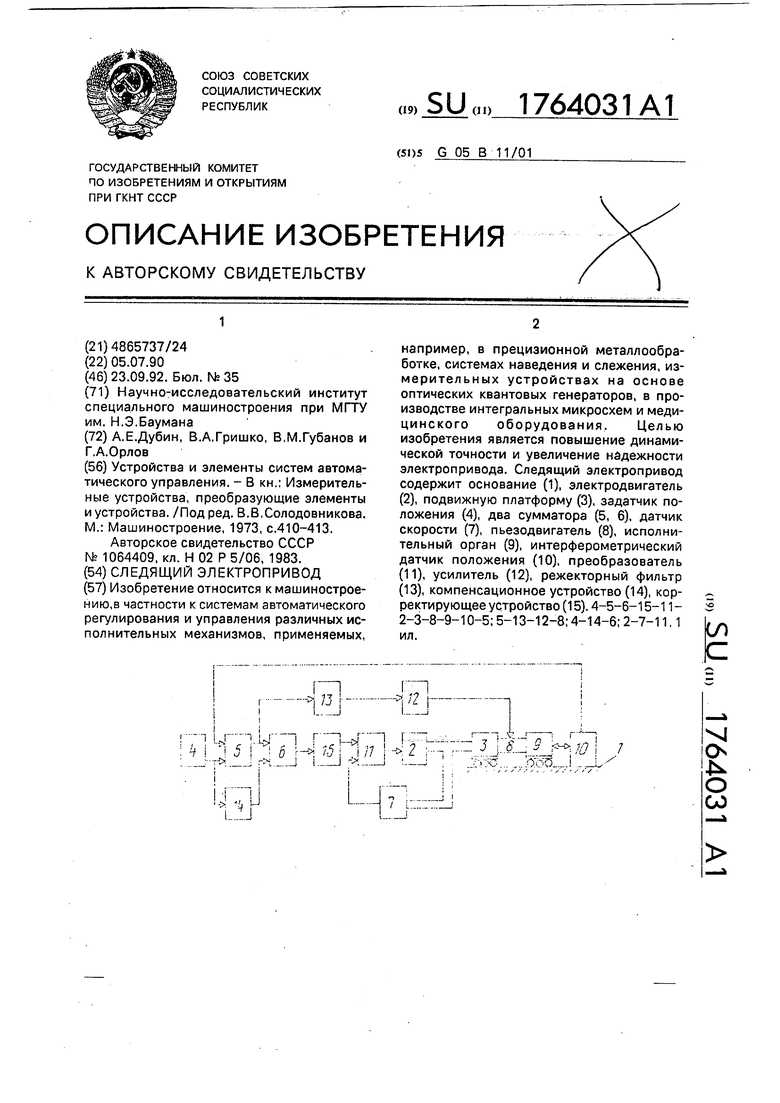
| Устройства и элементы систем автоматического управления | |||
| - В кн.: Измерительные устройства, преобразующие элементы и устройства | |||
| /Под ред | |||
| В.В.Солодовникова | |||
| М.: Машиностроение, 1973, с.410-413 | |||
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
