2, Импульсный регулятор перемещения пьезодвигателя по авт. св. № , отличающийся тем, что, с целью повышения динамической точности, регулятора, дополнительно введен усилитель заряда, а электрический выход изолированной пьезопластины составного пьезодвигателя. соединен с входом усилителя заряда, выход которого соединен с третьим входом устройства сравнения.
3. Импульсный регулятор перемещения пьезодвигателя по авт.св., отличающийся тем, что, с целью повышения динамической точности регулятораj выход устройства сравне- . ния соединен с управляющим входом источника напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор перемещения пъезодвигателя | 1983 |
|
SU1133582A2 |
| Импульсный регулятор перемещенияпьЕзОдВигАТЕля | 1979 |
|
SU847270A1 |
| Импульсный регулятор положения пьезодвигателя | 1985 |
|
SU1357915A1 |
| Пьезополупроводниковый стабилизатор постоянного напряжения | 1987 |
|
SU1408506A2 |
| Импульсный регулятор перемещения пьезодвигателя | 1986 |
|
SU1363134A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU365686A1 |
| Следящая система | 1979 |
|
SU842705A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Устройство управления пьезодвигателем | 1990 |
|
SU1737407A1 |
| Импульсный регулятор | 1972 |
|
SU457070A1 |
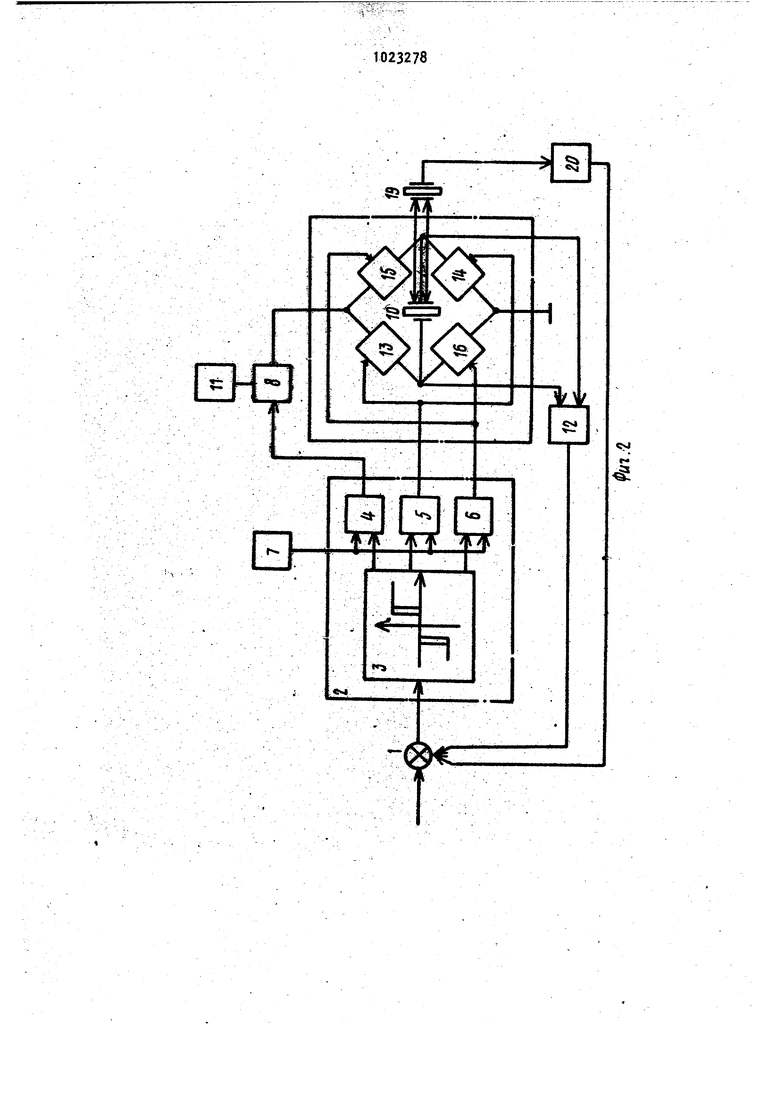
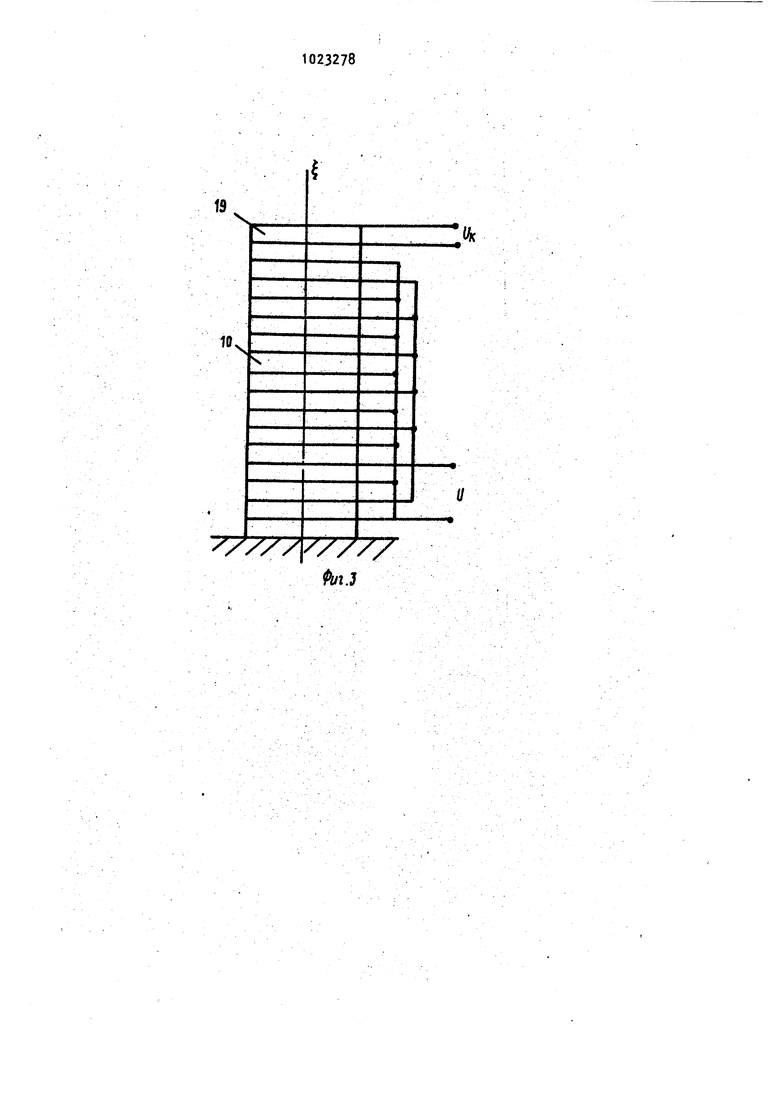
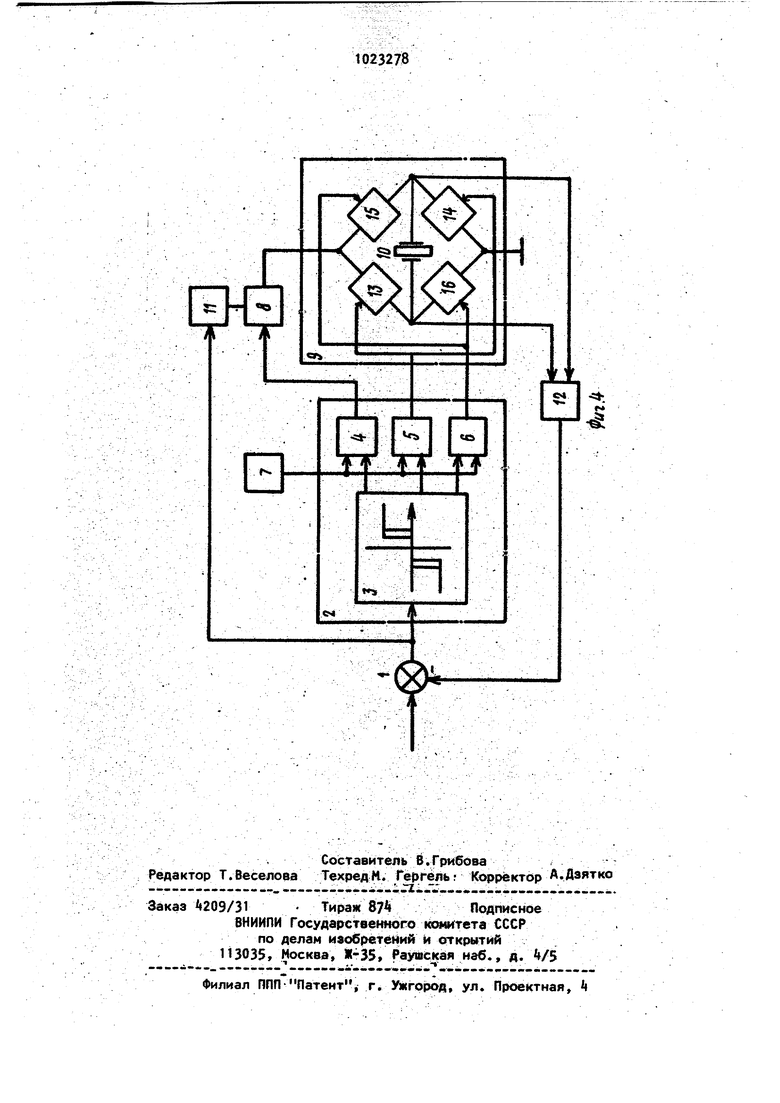
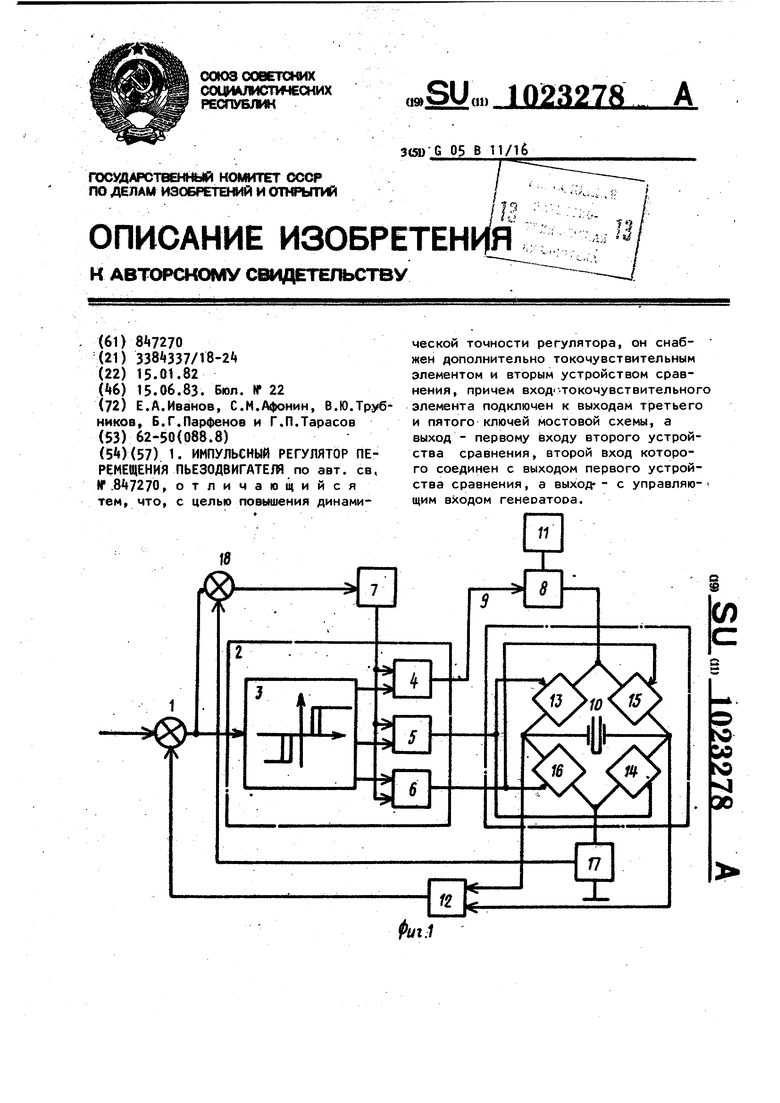
Изобретение относится к релейным устройствам систем автоматического управления и может быть использовано для трехпозиционного регулирования пьезоэлектрических двигателей. По основному авт. св. № известен импульсный регулятор перемещения пьезодвигате7 я, содержащий генератор и последовательно соединенные устройство сравнения и трехпозиционный релейнь|й усилитель, делитель и последовательно соединенные источник нап{эяжеНия, первый ключ и четыре ключа, соединенные в мостовую схемуv одна из диагоналей которой соединена с выходом регулятора и с входами делителя, а другая - с выходом первого ключа, управляющий вход которого соединен с первым выходом трехпозиционного релейного усилителя, второй выход которого соединен с управляющими входами второго и третьего ключей мое товой схемы, а третий выход - с управ ляющими входами четвертого и пятого ключей мостовой схемы, выход делителя соединен со вторым входом устройства сравненияf а выход генератора - с вторым входом трехпозиционного релейного усилителя. Однако известный импульсный регулятор обладает недостаточной динамической точностью, что сужает возможности применения регулятора. Целью изобретения является повышение динамической точности регулятора. Цель дoitигaeтcя тем, -что импульсный регулятор перемещения пьеэодвигателя дополнительно снабжен токочувствительным эл$ ментом и вторым устройством сравнения, причем вход токочувствительного элемента подключен к выходам третьего и пятого ключей моетоаои схемы, а выход - к первому входу второго устройства сравнения, второй вход которого соединен с выходом первого устройства сравнения, а выxdfl - с управляющим входом генератора. Согласно вторЬму варианту в импульсный регулятор перемещения пьезодвигателя дополнительно введен усилитель заряда, а электрический выход изолированной пьезопластины составного пьезодвигателя соединен с входом усилителя заряда, выход которого со единен с третьим входом устройства сравнения. В третьем варианте в импульсном регуляторе перемещения пьезодвигателя выход устройства сравнения соединен с управляющим входом источника напряжения. На фиг.1 представлена структурная схема.импульсного регулятора перемещения -пьезодвигателя, первый вариант; На фиг.2 - то же, второй вариант импульсного регулятора перемещения пьезодвигателяi на фиг.З кинематическая схема составного пьезодвигателя; На фиг. - структурная схема импульсного регулятора перемещения пьезодвигателя,третий вариант. Импульсный регулятор перемещения пьезодвигателя по перейму варианту (фиг.1) содержит первое устройство сравне ния 1, трехпозиционный релейный усилитель 2, который состоит из релейного элемента 3, реле 6, генератор 7 импульсов, первый ключ 8, мостовую. схему 9, пьезодвигатель 10, источник 11 напря 1 ния,делитель 12 и вторс 13 третий И, четвертый 15, пятый 16ключи, дополнительные токочувствйтельНый элемент 17, например резистор и второе устройство 18 сравнения: По второму варианту импульсный регулятор перемещения пьезодвигателя (фиг.2 и 3) дополнительно содержит выходную пьезопластину 19 составного пьезодвигателя, электрически изолированную от составного пьезодви гателя, усилитель заряда 20. Согласно третьему варианту импульсный регулятор перемещения пьезо двигателя (фиг.А) выход устройства сравнения 1 соединен с управляющим входом источника 11 напряжения. Регулятор (фиг.1) работает следую щим образом. Задающий сигнал через первое устройство 1 сравнения поступает на вхо трехпозиционного релейного усилителя 2, в зависимости от полярности задаю щего сигнала при превышении зоны нечувствительности репейного элемента включаются реле 5 или 6, а также реле k. При этом на вторые входы реле Ц-6 поступают тактирующие импульсы с генератора 7. Реле k обеспечивает в соответствии с тактирующими импульсами с генератора 7 включение ключа 8, который питает высоким напряжение от источника напряжения 11 одну из диагоналей мрстовой схемы 9, в другу диагональ включен пьезодвигатель 10. Реле 5 и 6, которые соединены с упра ляющими входами ключевых элементов, включенных в противоположные плечи моста, открывают в соответствии с та тирующими импульсами с генератора 7 ключи 13 и 14 или 15 и 16 в противоположных плечах моста (например, тиристоры, оптроны, транзисторы), чере которые происходит заряд емкости пьезодвигателя 10, следовательно, ра ширение или сжатие пьезодвигателя происходит в зависимости от полярнос ти задающего сигнала. . Перемещение пьезодвигателя , И, описывается зависимостью 1 d NV, гДе d - пьезомодуль, м/В; N - число пластинок пьезодвигателя;V - Напряжение, подаваемое на пьезодвигатель, В. Пьезодвигатель 10 является одновременно датчиком переме| ния, так как перемещение пропорционально напряже «1ю на нем, и напряжение с пьез двигатэля 10 в качестве сигнала обра ной связи подается через делитель 12 на первое устройство сравнения 1. Когда сигнал рассогласования между задающим сигналом и сигналом обратной связи на выходе первой схемы сравнения 1 станет меньше зоны нечувствительности релейного элемента 3, реле отключаются и ключи мостовой схемы 9 закрываются, заряд емкости пеезодвигателя 10 прекращается, а напряжение на нем запоминается. При стекании заряда с пьезодвигателя 10 при постоян;: ном задающем сигнале сигнал рассогла-, сования на выходе первой схекш сравнения 1 становится больше зоны нечувствительности релейного элемента 3.При этом в зависимости от полярности сигнала рассогласования включаются реле 5 или 6, а также реле k. В соответствии с тактирующими импульсами с генератора 7 через ключ 8 подается высокое напряжение на одну диагональ мостовой схемы 9, открываются ключи в противоположных, плечах 13 и Т или 15 и 16 в зависимости от полярности си|- нала рассогласования, и происходит подзаряд емкости пьезодвигателя АО, пока сигнал рассогласования между задаощим сигналом и сигналом обратной связи вновь станет меньше зоны нечyвcJвитeльнocти релейного элемента 3, затем реле отключается, ключи мостовой схемы 9 закрываются и напряжение на емкости пьезодвигателя запоминается. Для повышения динамической точности регулятора перемещения пьезодвигателя в первом варианте регулятора дополнительно введена корректирующая цепь, состоящая из второго устройства сравнения 18 и токочувствительности элемента 17. Сигнал с токочувствительного элемента 17, пропорциональный скорости перемещения пьезодвигателя, поступает на второе устройство сравнения 18, где сравнивается с сигналом рассогласования между задающим сигналом и сигналом обратной связи по напряжению. Сигналом с вцхода второго устройства сравнения 18 осуществляется уп-, равление широтной модуляцией тактирующих импульсов с генератора 7. При большой величине сигнала с выхода второго устройства сравнения (что может быть при большом уровне сигнала рассогласования и малой скорости перемещения пьезодвигателя) ширина импульсов генератора при неизменном периоде растет, что приводит к увеличению тока заряда пьезодвигателя, а 10 следовательно, и скорости его движения. При малой величине сигнала с выхода второго устройства сравнения (что может быть при малом уровне сигнала рассогласования и при состоянии пьезо двигателя, в котором напряжение на пьезодвигателе запоминается) ширина импульсов генератора остается малойскорость отработки малых рассогласо ваний невелика, и в переходных характеристиках пьезодвигателя отсутствует перерегулировсжие. Таким образом, введение дополнительной обратной связи по скорости пе ремещения пьезодвигателя увеличивает быстродействие регулятора, уменьшает перерегулирование в системе, что в целом,повышает динамическую точность регулятора. Для повышения динамической точности регулятора перемещения пьезодвигателя (фиг.2 и З) во втором варианте р гулятора дополнительно введены коррек тирующая выходная пьезопластина 19 и усили гель заряда 20. Корректирующая .выходная пьезопластина 19 механически соединена с пьезодвигателем и электрически изолирована от него (фиг,2). Напряжение на корректирующей выходной пьезопластине 19 пропорциональное ускорение пьезодвигателя, усиливается усилителем заряда 20 и поступает вмес те с сигналом с делителя 12 на второй вход первого устройства сравнения 1. Напряжение на корректирующей пьезо пластине пропорционально ускорению пьезодвигателя. В регуляторе без корректирующей пьеэопластины в переходных процессах возможно возникновение перерегулирования и кoлeбaтeльнoctи, которые сопровождаются знакопеременным чередованием больших ускорений конца пьезодвигателя, что приводит к ухудшению динамической точности ре гулятора. Подача напряжения е корректирующей пьезопластины 19 к усилителю заряда 20, подключенного к второму входу устройства сравнения, позволяет организовать отрицательную обратную связь по ускорению, которая препятствует возникновению больших пер регулирова8 .6 НИИ и колебательности за счет демпфирующих свойств организованной обрат- ной связи, следовательно, повышается динамическая точность регулятора. Для повышения динамической точности регулятора согласно третьему варианту (фигЛ) выход устройства / сравнения 1 соединен с управляющим входом источника напряжения 11.8 этом случ./е При большом сигнале рассогласования с выхода устройства сравнения 1 на пьезодвигатель от источника напряжения 11 подается большое напряжение и отработка большого рассогласования идет с большой скоростью за счет большого тока заряда пьезодвигателя. При малом сигнале рассогласования с выхода устройства сравнения 1 на пьезодвигатель от источника напряжения 11 подается малое напряжение и отработка малого рассогласования идет с малой скоростью за счет малого тока заряда пьезодвигателя, т.е. подход к заданному положению пьезодвигателя осуществляется с малой скоростью, чем устраняются колебательность и перерегулирование в динамических характеристиках регулятора и увеличивается плавность процесса регулирования и управления пьезодвигателем. . Предельные характеристики регулятора следующие: Диапазон рабочих частот, Гц 0-1000 Точность позиционирования пьезог 0,1-0,02 двигателя, мкм Диапазон перемещения пьезодви(-50)-(+50) гателя, мкм Диапазон входных ((+1) напряжений, В Диапазон выходных (-400)-(+400) напряжений, В Экономический эффект проявляется при использовании импульсного регулятора перемещения пьезодвигателя в автоматических системах фотографирования астрономических объектов в качестве прецизионного пьёзопривода фотокассеты, отслеживающего флуктуации атмосферы.
1Э
ч
Л
