Изобретение относится к машиностроению и может быть использовано в качестве нривода звеньев манинулятора.
Целью изобретения является повышение производительности за счет увеличения быстродействия привода.
На фиг. 1 и 2 изображен привод с электромагнитом, расположенным внутри емкости, соответственно в двух крайних положениях; на фиг. 3 и 4 - привод с электромагнитом, охватываюшим емкость, соответственно в двух крайних положениях.
Привод содержит эластичную емкость, выполненную в виде полого цилиндра 1 и двух фланцев 2 и 3. Внутри емкости раз- ферромагнитная жидкость 4. Фланец 2 соединен с неподвижным звеном 5, а фланец 3 - с перемеш,аемым звеном 6. Кроме того, привод содержит средство для воздействия на рабочую среду, выполненное в виде электромагнита 7, состоящего из катушки и магнитонровода. Электромагнит 7 размещен внутри эластичного цилиндра 1 (фиг. 1) или снаружи (фиг. 3) и закреплен на фланце 2.
Привод работает следующим образом.
При подаче электрического напряжения на катушку элекромагнита 7 ферромагнитная жидкость 4 под действием магнитных сил стремится замкнуть магнитный контур,
концентрируясь по силовым линиям магнитного поля. Это приводит к деформации эластичного цилиндра 1 и ноступательному перемещению фланца 3 вместе со звеном 6 в
другое крайнее положение привода (фиг. 2,4) При отключении магнитного поля под действием, упругих сил цилиндр 1 возвращается в исходное положение.
Быстродействие и нагрузочная способность привода определяется жесткостью эластичного цилиндра 1, параметрами магнитного ноля и свойствами рабочей среды. Изменением электромагнитного поля легко достигается плавность перемещения.
15
Формула изобретения
Привод поступательного перемещения, содержащий эластичную емкость, заполненную рабочей средой, и средство для воздействия на рабочую среду, отличающийся
тем, что, с целью повышения производительности за счет увеличения быстродействия, средство для воздействия на рабочую среду выполнено в виде электромагнита, а рабочая среда представляет собой ферромагпитную жидкость, при этом электромагнит охватывает эластичную емкость или электромагнит расположен внутри эластичной емкости.
5 6
фиг.З
/Л..
I I
U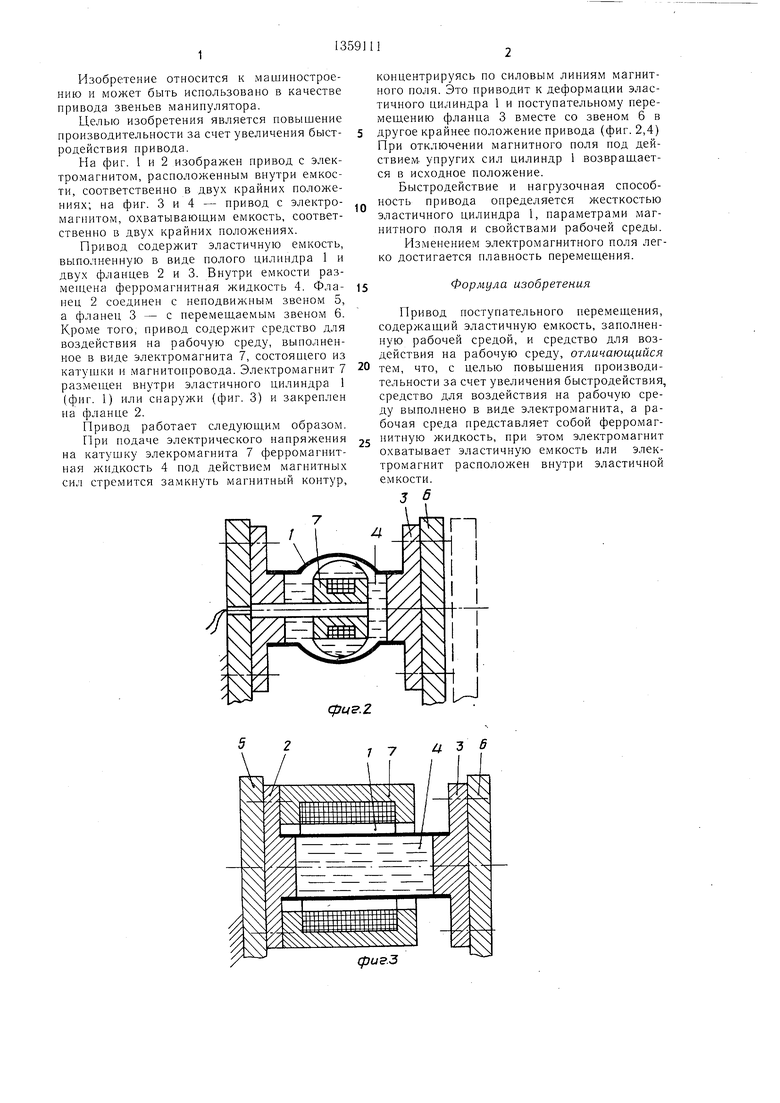
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод поступательного перемещения | 1990 |
|
SU1812099A1 |
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |
| Длинноходовой электромагнит с постоянным тяговым усилием на рабочем ходу | 2019 |
|
RU2711179C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ В ВАКУУМЕ | 1990 |
|
SU1809637A3 |
| СПОСОБ РАБОТЫ МАГНИТОЖИДКОСТНОГО НАСОСА | 1996 |
|
RU2120566C1 |
| ПРОПОРЦИОНАЛЬНЫЙ ЭЛЕКТРОМАГНИТ | 1997 |
|
RU2121726C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227957C1 |
| Линейный шаговый электродвигатель | 1986 |
|
SU1363395A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН (ВАРИАНТЫ) | 2010 |
|
RU2442925C2 |
| ЭЛЕКТРОМАГНИТ | 1996 |
|
RU2115185C1 |

Изобретение относится к машиностроению и может быть использовано в качестве привода звеньев манипуляторов. Целью изобретения является повышение производительности за счет увеличения быстродействия привода. Привод поступательного перемещения включает эластичную емкость 1, заполненную ферромагнитной жидкостью 4, и средство для воздействия на рабочую среду, выполненное в виде электромагнита 7. Изменением .магнитного поля обеспечивается регулировка нагрузочной способности привода и плавности перемещения. 4 ил. ш ел О5 сд со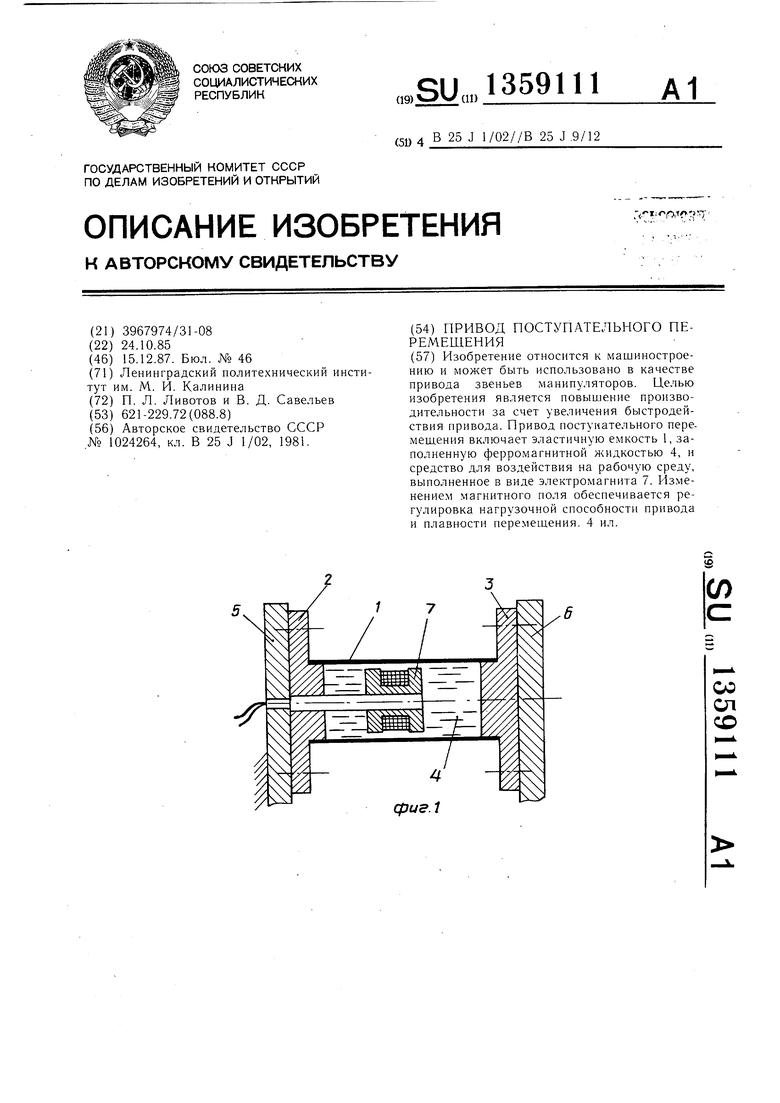
| Манипулятор Тенгиза | 1981 |
|
SU1024264A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
