ти измерений за счет высокой чувствительности интенсивности света в интерференционной картине. Ин ерфе- ренционная картина образуется тремя световыми пучками, отраженными от трех отражателей 2, 3, 4с разными коэффициентами отражения, закрепленных на контролируемой плоскости 5, В плоскости анализа определяются амплитуды, частоты и фазы пространственных гармоник в распределении интенсивности излучения, зафиксированного с помощью взаимно перпендикулярных линеек 6 и 7 фотодетекторов. Положение контролируемой плоскости опреде1
Изобретение относится к измерительной технике и может быть использовано при измерении параметров вибраций, колебаний и малых смещений рабочих поверхностей механизмов.
Целью изобретения является повышение точности измерений пространст- венного положения плоскости за счет высокой чувствительности распределения освещенности в интерференционной картине, образованной тремя световыми пучками, отраженными от отражателей, расположенных на плоскости, к пространственному положению, плоскости.
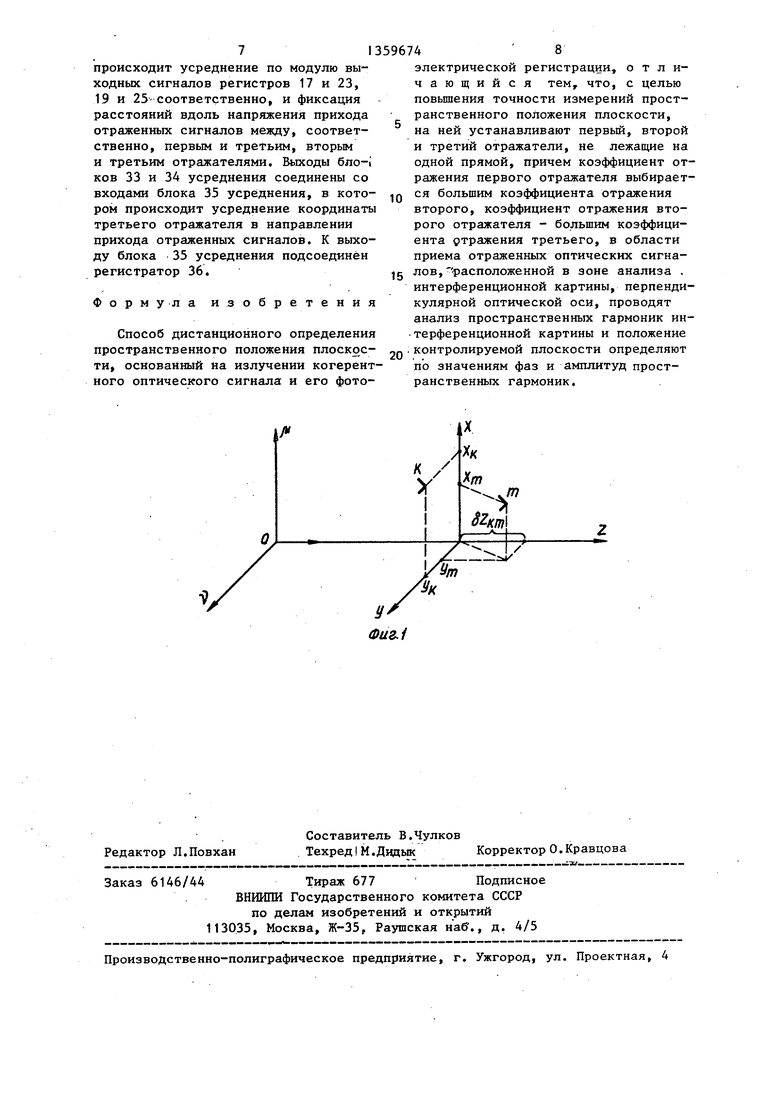
На фиг. 1 показано относительное расположение отражателей, точки О наблюдения и используемой системы координату на фиг, 2 - схема устройства для осуществления предлагаемого способа.
На плоскость, положение которой нужно контролировать, устанавливают три оптических отражателя: первый, второй и третий, не лежащие на одной прямой и имеющие разные коэффициенты отражения. Коэффициент отражения первого отражателя больще коэффициента отражения второго отражателя, а коэффициент отражения второго больше коэффициента отражения третьего, Когерентный оптический сигнал излучается в направлении указанных отражателей, В ме сте приема отраженных сигналов в плоскости анализа, котоляется по координатам меньших отражателей 3 и 4 относительно отражателя 2 с большим коэффициентом отражения, которые связаны с частотами и фазами трех пространственных гармоник, формируемых сигналами от различных пар отражателей. Путем сравнения возможных комбинаций взаимных положений отражателей вьоделяется комбинация, удовлетворяющая системе параметров трех зарегистрированных пространственных гармоник. Координаты отражателей 3 и 4 фиксируются регистратором 29 и блоком 30 и регистраторами 32 и 36. 2 ил.
рая перпендикулярна линии визирования, анализируют распределение интенсивности сигнала, переменная (в пространстве) составляющая которого
представляет линейную сумму трех пространственных гармоник:
Г 2A,A,cos( V, - () + + 2A,A,cos((, -V,,) +
+ ,cos(i - Vj ).
Для зоны Фраунгофера 2A,((, -Vn,)
(1)
,Е ВкВт U/XK X
YK - Y,
( KZY Z
9 + 2SZ,
I
(2)
где Е - амплитуда поля в области от- ражателей;
|, коэффициенты отражения k-ro
и ш-го отражателей} - длины волны излучения} Z - расстояние от плоскости ана- лиза Л1 до области установки отражателей;
К 2
; Х, Х, Yjj, Y - координаты k-ro и та-го отражателей, координатные оси X и Y перпендикулярны оск Z и па3
раллельным осям щ и } соответственно;
расстояние между k-м и т-м отражателями в направлении оси Z (фиг. 1). В соответствии с условием
В В В,
как видно из (1), переменная составляющая I содержит три пространственные гармоники:
G,, 2A,A,cos((, -Vj ) I,cosV,jG,3 2A,A,cos((, - Уз) 1,, cosqj,3 3
2Aj,((j - Vj ) Ij cos9z3 , причем в соответствии с (3)
(г ti гэ
Анализируя распределение интенсивности излучения в плоскости «9 можно выделить (например, методами . цифровой фильтрации) гармоники G ,2 , G,;j , Gjj, а также их составляющие по осям и и : G , G,,9 G,,. , G. По фазам гармоник tp 2K.oZ|j определяется расстояние между k-M и га-м отражателями в направлении оси Z: S Z.
По периодам составляющих гармоник в направлении осей (Ц и v
ЦК,
/XK - Xj
ttw /Y - Y / K. rn
можно найти расстояние между отража- телями /X,- и /Y, - .
Если изображение большого отражателя расположить в точке пересечения осей ГЦ и ) , т.е. fn, О, , О, то по значениям /X, - и /Y , - Y можно определить положение среднего отражателя относительно большого. Здесь возможны два случая: если Cf ц, tf , , то координаты /и и )2 ( /X,- X,,/, /Y, - ) берутся с одинаковым знаком - любым, необходимо знать только нап,
)
359674
равляющие косинусы, которые не изменяются при отражении точки (щ, ) в точке ( (К,, ), ), а не абсолютное
g положение контролируемой плоскости в пространстве, если жеср, tp-j , то знаки у pj и должны быть разные. „
По значениям /X , - и /Y, 10 Y / определяются относительно точки (и О, 0) два возможные положения малого отражателя ( .
. . /vr . .
; ) И (, , ), приче Vf , f 15 1ГЗ значениям /X - X.,/ и
/
(t:
/Y, -.
/ - YJ/ определяются относительно точки (|Uj, j ) два возможные положения малого отражателя ( ( , ) ) и
(р ;, Г ).
Из четырех полученных значений по каждой координате ( - ш, ,
лГГ) л nV) I э
э выбираются два ближайших или совпадающих, которые являются координатами малого отражателя (/j,, ). Полученные три точки (|V,, i), ), (Мг ) ( з ) характеризуют . положение контролируемой плоскости в пространстве.
Устройство для осуществления пред- лагаемого способа (фиг. 2) работает следующим образом.
. Когерентное излучение источника 1 попадает на три отражателя 2, 3 и 4, соответственно первый, второй и тре35 тий не лежащие на одной прямой и
установленные на контролируемой плоскости 5. В плоскости анализа, перпендикулярной направлению прихода отраженных отражателей сигналов,
40 расположена крестообразная фотоэлектрическая приемная структура в виде двух взаимно перпендикулярных линеек 6 и 7, соответственно, квадратичных фотодетекторов с достаточно
45 большим числом элементов. I
Выходные сигналы линеек 6 и 7
поступают на аналого-цифровые преобразователи 8 и 9, выходы которых соединены с цифровыми фильтрами 10 и 11. На выходе цифровых фильтров 10 и 11 появляются коды числовых значений амплитуды, частоты и фазы каждой из составляющих (в направлении
50
551
соответствующей линейки фотодетекторов) трех пространственных гармоник, образованных в плоскости линеек в результате интерференции сигналов от отражателей 2, 3 и 4. Выходные сигналы цифровых фильтров 10 и 11 поступают на селекторы-коммутаторы 12 , в которых происходит разделение гармоник по амплитудам на первую, вторую и третью и коммутация кодов числовых значений частоты и фазы составляющих пространственных гармоник- на регистры 14 и 15, 16 и 17, 18 и 19, соответственно, сильной, второй и третьей гармоник линейки 6 и на регистры 20 и 21, 22 и 23, 24 и 25, соответственно, первой, второй и третьей гармоник линейки 7. В peг icтpax 14 и 20 фиксируются расстояния между первым и вторым отражателями по осям линеек 6 и 7 соответственно, которые пропорциональны частотам составляющих первой гармоники по этим осям. В регистрах 15 и 21 фиксируются фазы составляющих первой гармоники по осям линеек 6 и 7 соответственно, которые пропорциональны расстоянию между первым и вторым
отражателями вдоль направления прихо- 25 ординат малого отражателя относительда отраженных сигналов.
Аналогично в регистрах 16, 22 и 18, 24 фиксируются расстояния пропорциональные частотам составляющих, соответственно, средней и слабой . гармоник по этим осям.
В регистрах 17, 23 и 19, 25 фиксируются фазы составляющих, соответственно, средней и слабой гармоник по осям линеек 6 и 7 соответственно, которые пропорциональны расстоянию, соответственно, между большим и малым, средним и малым отражателями вдоль направления прихода от- . раженных сигналов. .
К выходам регистров 15 и 21, 17 и 23, 19 и 25 подсоединены блоки 26 27 и 28 сравнения, соответственно, в которых происходит сравнение фаз, зафиксированных в этих регистрах. Если фазы одного знака, то на выз4о- де блока сравнения появляется положительный сигнал, если фазы разных знаков, то сигнал будет отрицательным .
К выходам регистров 14 и 20 подсоединен регистратор 29, на который кроме того, подается сигнал с выхода блока 26 сравнения. При положительном сигнале на выходе блока 26 сравнения относительные (относительно большого отражателя) координаты второго отражателя с регистров 14 и 20 фиксируются в регистраторе 29 с
одинаковым знаком (.любым),. при отрицательном сигнале - с противоположными знаками. К выходу регистров
15 и 21 подсоединен блок 30 усреднения, в котором происходит усреднение по модулю выходных сигналов регистров 15 и 21 и фиксация расстояния между первым и вторым отражателями вдоль направления прихода отраженных сигналов.
Выходы блоков 27 и 28 сравнения подсоединены к блоку 31 сравнения, на который, кроме того, подаются
сигналы с регистров 16, 22 и 18, 24. Если с выхода блока 27 сравнения .идет положительный сигнал, в блоке 31 сравнения фиксируются два значения координат малого отражения относительно большого отражателя с регистров 16 и 22 с положительным и отрицательным знаками, если сигнал на выходе блока 27 сравнения отрицательный, то фиксируются два значения коно первого отражателя с регистров 16 и 22 с разными знаками: сигнал с регистра- 16 с положительным знаком, с регистра 22 - с отрицательным знаком,
0 с регистра 16 - с отрицательным зна-i ком, с регистра 22 - с положительным знаком. Если с выхода блока 28 срав- .нения идет положительн.ый сигнал, в блоке 31 сравнения фиксируются два
г значения координат малого отражателя относительно второго отражателя с регистров 18 и 24 с положительным и отрицательным знаками, если сигнал на выходе блока 28 сравнения
0 отрицательньй, то фиксируются два значения координат третьего отражателя относительно второго отражателя с регистров 18 и 24 с разными знаками: сигнал с регистра 18 с поg ложительным знаком, с регистра 24 - с отрицательным знаком, сигнал с регистра 18 с отрицательным знаком, с регистра 24 - с положительным знаком. В блоке 31 сравнения происходит сравнение четырех зафиксированных координат третьего отражателя, из которых выбираются две ближайшие (и (или совпадающие), которые усредняются и подаются на выход блока 31 сравнения, К выходу блока 31 сравнения подсоединен регистратор 32.
К выходам регистров 17 и 23, 18 и 25 подсоединены блоки 33 и 34 усреднения соответственно, в которых
0
5
происходит усреднение по модулю выходных сигналов регистров 17 и 23, 19 и 25 соответственно, и фиксация расстояний вдоль напряжения прихода отраженных сигналов между, соответственно, первым и третьим, вторым и третьим отражателями. Выходы бло-i ков 33 и 34 усреднения соединены со входами блока 35 усреднения, в котором происходит усреднение координаты третьего отражателя в направлении прихода отраженных сигналов. К выходу блока 35 усреднения подсоединён регистратор 36.
Формула изобретения
Способ дистанционного определения пространственного положения плоскости, основанный на излучении когерентного оптического сигнала и его фото0
электрической регистрации, отличающийся тем, что, с целью повышения точности измерений пространственного положения плоскости, на ней устанавливают первый, второй и третий отражатели, не лежа1цие на одной прямой, причем коэффициент отражения первого отражателя выбирается большим коэффициента отражения второго, коэффициент отражения второго отражателя - большим коэффициента отражения третьего, в области приема отраженных оптических сигна- 5 лов,расположенной в зоне анализа . интерференционной картины, перпендикулярной оптической оси, проводят анализ пространственных гармоник ин- терференционной картины и положение контролируемой плоскости определяют по значениям фаз и амплитуд пространственных гармоник.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения прозрачности оптической среды | 1981 |
|
SU958927A1 |
| ИМПУЛЬСНО-ФАЗОВАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2013 |
|
RU2551448C1 |
| Устройство для контроля зеркальной фотокамеры | 1991 |
|
SU1818616A1 |
| РАДИОИНТРОСКОП | 1996 |
|
RU2084876C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2093856C1 |
| АВТОНОМНАЯ СИСТЕМА ЗАЩИТЫ СТАНЦИЙ С ЗЕРКАЛЬНО-ПАРАБОЛИЧЕСКИМИ АНТЕННАМИ ОТ ВОЗДЕЙСТВИЯ ПОМЕХОВЫХ СИГНАЛОВ И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2006 |
|
RU2311708C1 |
| Способ неразрушающего контроля | 1988 |
|
SU1608493A1 |
| Устройство для измерения рабочего отрезка объективов | 1982 |
|
SU1049768A1 |
Изобретение относится к измерительной технике и может быть использовано при измерении параметров вибраций, колебаний и малых смещений рабочих поверхностей механизмов. Цель изобретения - повьшение точноефиг2 (Л со СП Oi 4
Редактор Л.Повхан
Составитель В.Чулков
Техред М.ДвдыкКорректор О.Кравцова
6146/44
Тираж 677Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская н аб ., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для определения углов наклона объектов | 1973 |
|
SU528446A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
