113610972
Изобретение относится к подъемно- Второй клин 5 имеет угол
транспортному машиностроению, в част к ловителям и является усовершенствованием устройства по авт.св. N 887407
Цель изобретения - повышение надежности работы устройствао
На чертеже изображен ловитель, общий видо
Ловитель содержит, корпус 1, внутри которого . установлены два клина. Первый клин состоит из подвижной 2 и неподвижной 3 частей для захвата каната 4о Второй клин 5 предназначен дпя освобождения каната 4, который свободно пропущен внутри корпуса 1 между первым и вторым клиньями, Крьш1ка 6 имеет отверстие для -установки пиропатрона 7. Возвратная пружина 8 расположена между подвижной 2 и неподвижной 3 частями первого клина. Прижимная пружина 9 размещена под крьшкой 6 на верхней части второго клина 5„ Регулируемый упор 10 взаимодействует с нижней частью второго клина 5, со штоком гидроцилиндра 11, Выход датчика 12 положеьшя соединен с входом сигнализатора 13, установленного на пульте управления (не показан ) подъемной мапшны и с входом привода 14 управления положением вентиля 15 слива.
Для подачи аварийного.сигнала на пиропатрон 7 предусмотрены контакты 16, Горение пороха происходит в замкнутой камере 17, Пиропатрон 7 служи приводом первого клина, поэтому примыкает к верхней широкой стороне подвижной части 2 этого клина. Возвратная пруясина 8 предназначена для возврата и удержания подвижной части 2 первого клина в исходном состоянии, усилие ее незначительно.
Датчик 12 положения пр.е|Цназначен дпя регистрации возвращения и нахождния подвижной части 2 первого клина в исходном состоянии. Прижимная пружина 9 установлена с предварительным сжатием и имеет значительное усилие, Первьш клин имеет угол о , который меньше угла у трения клина о канат 4 чем достигается перемещение первого клина под действием пороховых газов без отскоков в момент соударения о канат 4, т,е, плавное перемещение как начале, так и в процессе обжатия каната 4, Этим обеспечивается надежный захват ловителем каната 4,
Второй клин 5 имеет угол
р, который V клина о
0
больше, чем угол трения канат 4, Этим достигнута уменьшение усилия перемещения второго клина вверх, т,е, усилия расклинивания ловителя и освобождения каната.
Следовательно, в конструкции ловителя имеет место неравенство о( ft,
В то же время угол /ъ превыпшет угол 0 на 20-30%.
В нерабочем положении ловителя второй клин 5 покоится на регулируемом упоре 10, который,,в свою оче- 5 редь, находится в крайнем нижнем положении, однако меходу канатом 4 и рабочими поверхностями обоих клиньев сохраняются рабочие зазоры, обеспечивающие нормальное перемещение 0 каната 4 в ловителе при работе
подъемной машиныо Это обеспечивается тем, что подвижная часть 2 первого клина также находится в исходном состоянии, т,е, в верхнем поло- 5 жении, чем достигается взаимодействие первого клина с пиропатроном 7 и датчиком 12 положения, В гидроцилиндре- И рабочее тело (например, масло) отсутствует, так как вентиль 15 открыт и обеспечивает сообщение гидроцилиндра 11 со сливным трубопроводом
Ловитель работает следующим образом,
Пр-и появлении аварийного сигнала на контактах 16 происходит воспламенение пороха пиропатрона 7 и резкое возрастание давления газов в камере 17, где находится пиропатрон 7, Под 0 действием давления пороховых газов подвижная часть 2 первого клина начинает свое движение В1Л13 по скользящей поверхности корпуса до соприкосновения с канатом 4, Канат 4 при этом прижимается к второму клину 5, поэтому первый клин, перемещаемый пороховыми газами и дополнительно увлекаемый канатом 4 вниз, заклинивается между ним и корпусом ловителя и служит источником создания силы трения, под действием которой канат останавливается, Перемещение подвижной части 2 первого клина из исходного состояния вниз, т,е. переход ловителя в рабочее положение, фиксируется датчиком 12 положения, от которого подается управляюпщй сигнал на вход привода 14 управления, отчего вентиль 15 слива приво5
5
0
5
с
дится в состояние Закрыто и разобщает гидроцилиндр со сливным трубопроводом. При этом гидроцилиндр оказывается подготовленным к работе по освобождению каната 4 от действия ловителя. Управляющий сигнал датчика 12 положения одновременно подается на вход сигнализатора 13, оповещая оператора подъемной машины (не показан) о срабатывании ло-- вителя и заклинивания каната.
Для освобождения каната 4 от действия ловителя оператором дистанционно с пульта управления подъемной машиной подается команда на подачу рабочего тела в гидроцилиндр I1, Гидроцилиндр 11 приводится в действие и через свой шток снизу вверх воздействует на регулируемый упор 10, на котором покоится второй клин 5. За счет усилий, развиваемых .гидроцилиндром 11, второй клин 5 перемещается вверх, освобождая канат 4 от действия ловителя, в результате чего между, рабочими поверхностями обоих клиньев и канатом 4 образуются зазоры. Освобожденная от воздействия усилия трения подвижная часть 2 первого кгдана под действием упругих I сил возвратной пружины 8 перемещается вверх к исходному положению. При достижении подвижной частью 2 первог клина исходного состояния зазоры между канатом 4 и рабочими поверхностями обоих клиньев возрастают и становятся равнымирабочим значениям. При этом датчик 12 положения срабатывает и снимает управляющий сигнал как с входа сигнализатора 13, так и с входа блока 14 управления, Вентиль 15 слива приводится в состояние Открыто и все масло из гидроцилиндра 11, который до сих пор перемещал второй клин 5 вверх, через открытьй
Редактор А.Ворович Заказ 6190/25
Составитель Н.Петров Техред М.Ходанич
Корректор
Тира 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская нйб, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
610974
вентиль 15слива уходит в трубопровод слива.Второй клин 5 при этом прекращаетсвое перемещение вверх
или даже начинает перемещаться в об- 5
ратном направлении, т.е. вниз под
действием преобладающего усилия приёмной пружины 9 над усилием гидроцилиндра 11. Учитывая показания сиг10 лализатора 13, оператор подъемной установки отключает подачу масла в гидроцилиндр 11, от чего усилие последнего для перемещения второго клина 5 вверх становится равным нулю.
15 Второ й клин 5 вместе с упором 10 и поршнем 11 под действием усилия прижимной пружины 9 полностью опустится вниз и приходит в исходное состояние. При этом ловитель оказывается
20 в состоянии готовности для выполнения следующего цикла.
5
0
5
0
изобр е тения
Ловитель по авт.ев, № 887407, отличающийся тем, что, с целью.повышения надежности работы, он снабжен вторым клином, подпружиненным в верхней части относительно корпуса и расположенным между корпусом и канатом со стороны, противоположной первому клину, регулируемым упором, взаимодействующим с нижней частью второго клина, гидроцилиндром со штоком, кинематически связанным с упомянутым регулируемым упором, установленным на трубопроводе гидроцилиндра вентилем слива, смонтированным в корпусе датчиком положения первого клина и приводом управления вентиля слива с сигнализатором, при этом выход датчика положения первого клина соединен с входами привода управления вентиля слива и сигнализатора
Корректор Б.Бутяга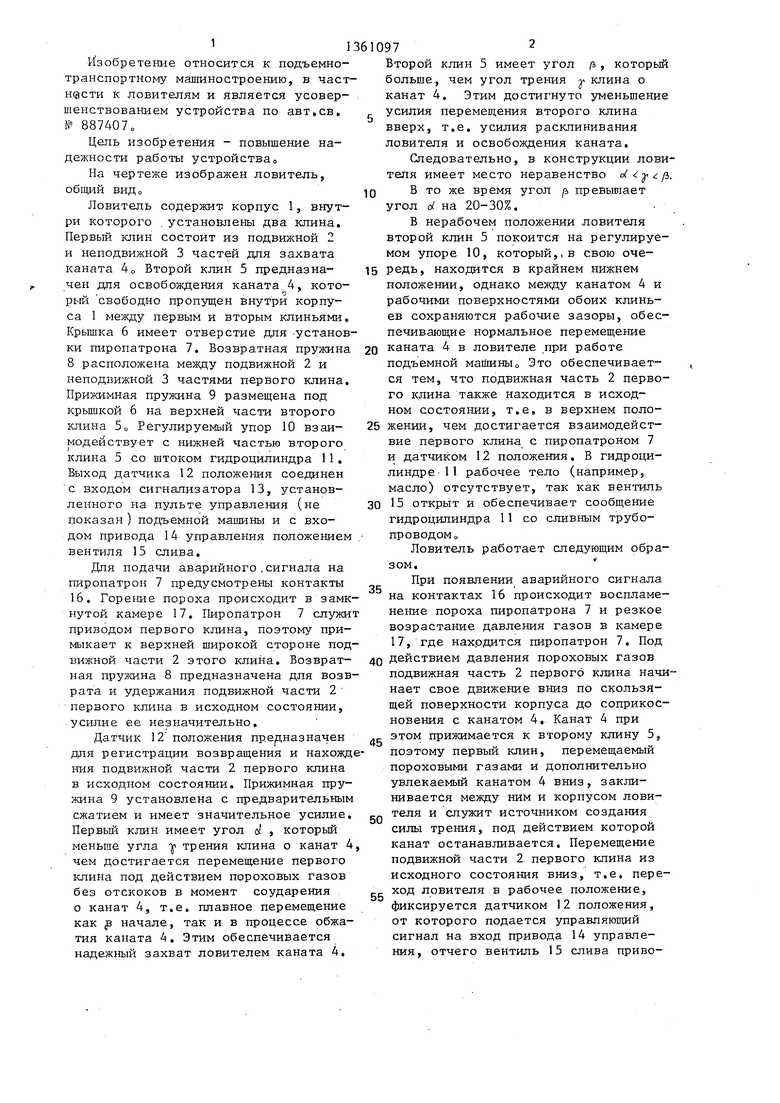
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель | 1980 |
|
SU981169A1 |
| Ловитель каната подъемной установки | 1982 |
|
SU1079579A1 |
| Ловитель | 1975 |
|
SU541762A1 |
| Ловитель | 1983 |
|
SU1164187A1 |
| Ловитель грузоподъемного средства | 1980 |
|
SU931641A1 |
| Ловитель | 1987 |
|
SU1495255A1 |
| Ловитель лифта | 1986 |
|
SU1331785A1 |
| Ловитель | 1980 |
|
SU887407A1 |
| Ловитель | 1979 |
|
SU852752A2 |
| Скважинный комплекс защиты пласта | 2017 |
|
RU2663757C1 |
Изобретение относится к подъем- но-транспортному машиностроению, в частности к конструкции ловителя. Цель изобретения - повышение надежности в работе. Устройство содержит клин, состоящий из двух подпружиненных друг относительно друга частей 2 и 3 и клин 5 о В корпусе 1 установлен пиропатрон 7 для приведения в действие устройства. Подпружиненный клин 5 предназначен для освобождения каната 4 и расположен в корпусе с противоположной стороны каната по отношению к юставному клину. Под клином 5 размещен регулируемый упор 10, взаимодействующий со штоком цилиндра 11, установленным на трубопроводе, оснащенном вентилем слива 15. В корпусе 1 размещен датчик 12 положения составного клина, соединенный с входом сигнализатора 13 и входом блока 14 управления Угол трения (/з) клина 5 и угол трения (о) составного клина определяется из соотношения /s 1,2-1,3. 1 ил. о & СО 10со О5 со М ГЧ)
| Ловитель | 1980 |
|
SU887407A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| I | |||
