(5) ЛОВИТЕЛЬ ГРУЗОПОДЪЕМНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель кабины лифта | 1988 |
|
SU1717515A1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ | 2013 |
|
RU2527626C1 |
| Ловитель кабины лифта | 1981 |
|
SU1079580A1 |
| Устройство для торможения кабины лифта | 1984 |
|
SU1164186A2 |
| Устройство для торможения кабины лифта | 1982 |
|
SU1089026A2 |
| Устройство для абразивной резки вращающихся длинномерных заготовок | 1991 |
|
SU1809800A3 |
| Ловитель кабины лифта | 1980 |
|
SU1121225A1 |
| Устройство для торможения кабины лифта | 1981 |
|
SU1047813A1 |
| Предохранительное устройство для торможения кабины лифта | 1977 |
|
SU659503A1 |
| Установка для резки листового проката | 1987 |
|
SU1470468A1 |
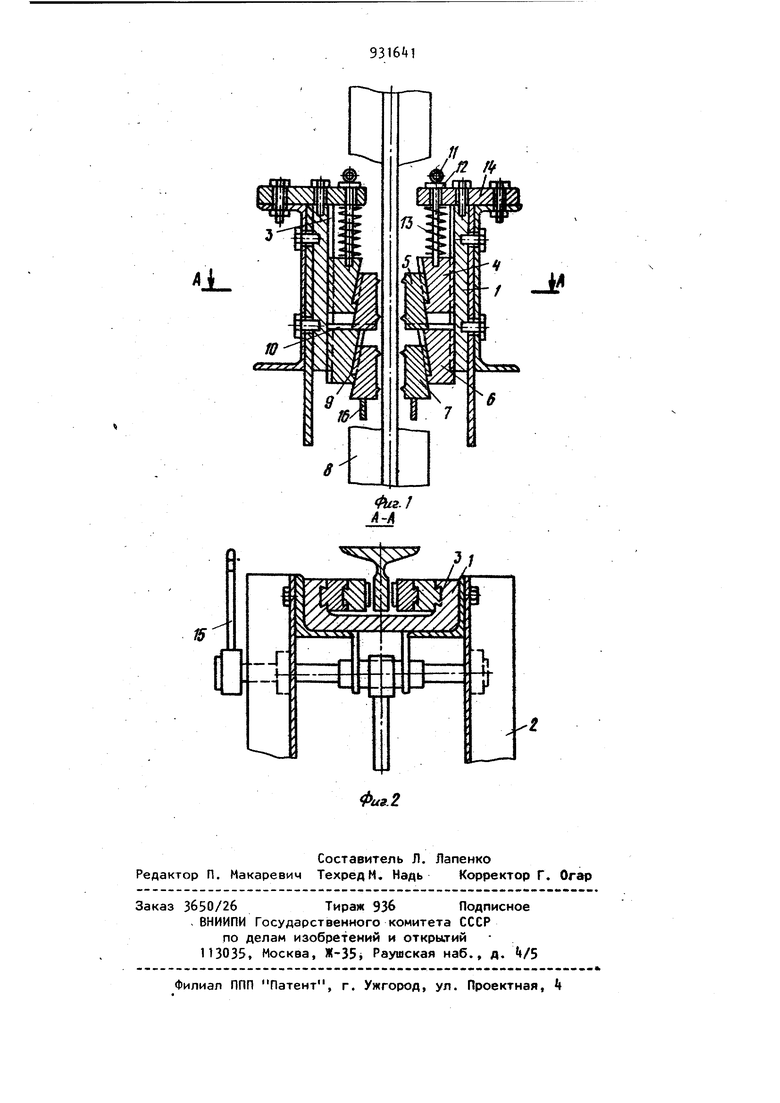
Изобретение относится к подъемнотранспортной технике и может быть использовано в грузоподъемных средствах, леремещающихся в жестких направляющих, требующих исключения падения рабочего органа при превышении скорости перемещения сверх допустимой в результате обрыва тяговых канатов и других неисправностей подъемного механизма. Известен ловитель грузоподъемного средства, содержищий смонтированные в корпусе колодки, имеющие пазы, в которых размеи1ена пара клиньев, связанная с механизмом включения ловителей и воздействующая своей рабочей поверхностью на направляющую, причем колодки снабжены штангами, на которые навиты пружины, зажатые между торцами колодок и корпусом Cl. Недостатком известной конструкции является то, что применение в клине роликов и башмаков не снижает тех усилий, которые возникают в процессе захода клина в неподвижную, колодку по мере продвижения кабины вниз, доводя эти трения до очень больших величин, а также в момент захода клина в колодку возникают значительные динамические нагрузки, которые находятся в прямой зависимости от времени их действия на организм человека, а также от того пути, который проходит кабина с грузом в направляющих в момент заклинивания клина в колодке. Цель изобретения - уменьшение динамических нагрузок в момент торможения. Для достижения цели ловитель снабжен основанием, размещенным в корпу- . се, и дополнительной парой клиньев с колодками, смонтированными в основании, причем на последнем выполнены вертикальные пазы для размещения в них колодок, а на торцах ниж.них колодок - горизонтальные пазы для перемещения по ним клиньев другой пары. Кроме того, штанги могут быть выполнены регулируемыми. На фиг. 1 показан ловитель, общий вид в разрезе; на фиг. 2 - сечение А-А на фиг. 1. Ловитель грузоподъемного механизма состоит из основания 1, которое крепится к корпусу 2 грузоподъемного механизма. 8 пазах основания 1 пе,ремевдаются верхняя дополнительная пара колодок Ц с клиньями 5 и нижняя пара колодок 6 с клиньями 7 только вверх параллельно направляющей 8, так как в теле каждого из клиньев ;7 и 5 выполнены выступыЭ. Торцы нижних колодок 6 выполненыс пазами 10 для перемещения по ним клиньев 5 другой пары. Такое выполнение позволяет клину 7 перемещаться относитель но колодки 6 и удерживать колодки 6 и клинья 7 в подвешенном состоянии Дополнительная пара верхних коло док + снабжена регулировочными винтами 11, которые в верхней части име ют упор 12, а нижней своей частью ввертываются в тело колодок 4. Винты 11 ограничивают перемещение колодок 4 и клиньев 5 вниз, удерживают клин с колодками в рабочем положении, а также регулируют зазор между клинья ми 5 и направляющей 8. На винтах 11 навиты пружины 13 которые в нерабо чем положении клиньев не нагружены и взаимодействуют с основанием 1 посредством планок с отверстиями закрепленных на основании. Устройство работает следующим об разом. При достижении грузоподъемным механизмом предельно допустимой ско рости перемещения, возникающей, например, при обрыве тяговых включений канатов, срабатывает ограничитель скорости и механизм включения ловителей. Механизм 15 включения ло вителей своими рычагами 16 воздейст вует на нижние клинья 7, которые перемещаются вверх, выбирают зазор между клиньями 7 и направляющей 8. В результате захода клиньев 7 в. пазы коЛодок 6, последние не самозаклиниваются, а .продолжают перемещаться вверх вдоль основания 1 параллельно направляющей 8. В результате сил трения между клиньями 7 и направляющей 8 и между колодками 6 основанием 1 происходит торможение грузоподъемного механизма. Перемещаясь вверх, нижние колодки 6 с пазами 10 своими торцами входят в зацепление с верхними клиньями 5, стараясь заклинить их в верхних колодках k, В то же время под действием инерционных сил и пружины 13 верхние колодки прижимают клинья 5 к направляющей 8. В результате срабатывания второй пары клиньев 7 происходит дальнейшее торможение грузоподъемного механизма и его полная остановка. Для снятия грузоподъемного механизма с ловителей необходимо приподнять грузоподъемный механизм, при этом колодки поднимаются вверх и клинья отходят ст направляющих . Применение предлагаемого устройства .позволяет улучшить условия труда при выполнении работ с грузоподъемным механизмом и повысить производительность труда. Формула изобретения 1.Ловитель грузоподъемного средства, содержащий смонтированные в корпусе колодки, имеющие пазы, в которых размещена пара клиньев, связанная с механизмом включения ловителей и воздействующая своей рабочей поверхностью на направляющую, причем колодки снабжены штангами, на которые навиты пружины, зажатые между торцами колодок и корпусом, отличающийся тем, что, с целью уменьшения динамических нагрузок в момент торможения, он снабжен основанием, размещенным в корпусе, и дополнительной парой клиньев с колодками, смонтированными в основании, причем на последнем выполнены вертикальные пазы для размещения в них колодок, а на торцах нижних колодок - горизонтальные пазы для перемещения по ним клиньев другой пары, 2.Ловитель по п. 1, отличающий ся тем, что штанги колодок выполнены регулируемыми. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2802788/11, кл. В 66 В S/2k, 1979 (прототип).
