Изобретение относится к стендам для испытаний транспортных средств и их узлов, в частности к стендам для исследования систем тяги и электромагнитного подвеса бесконтактных экипажей.
Цель изобретения повышение точности.
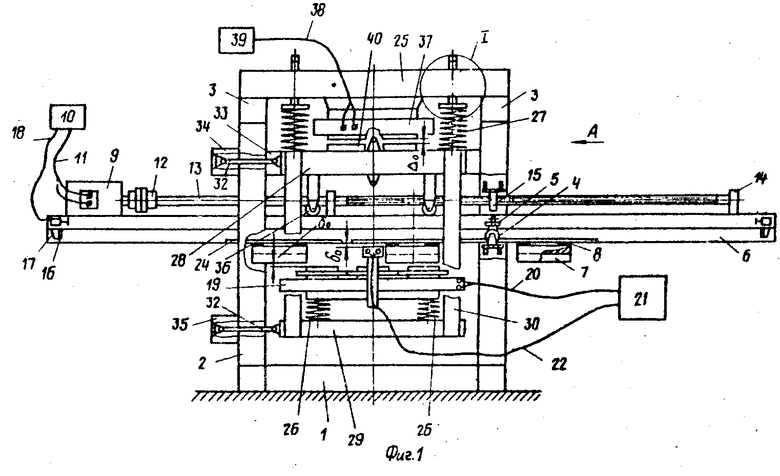
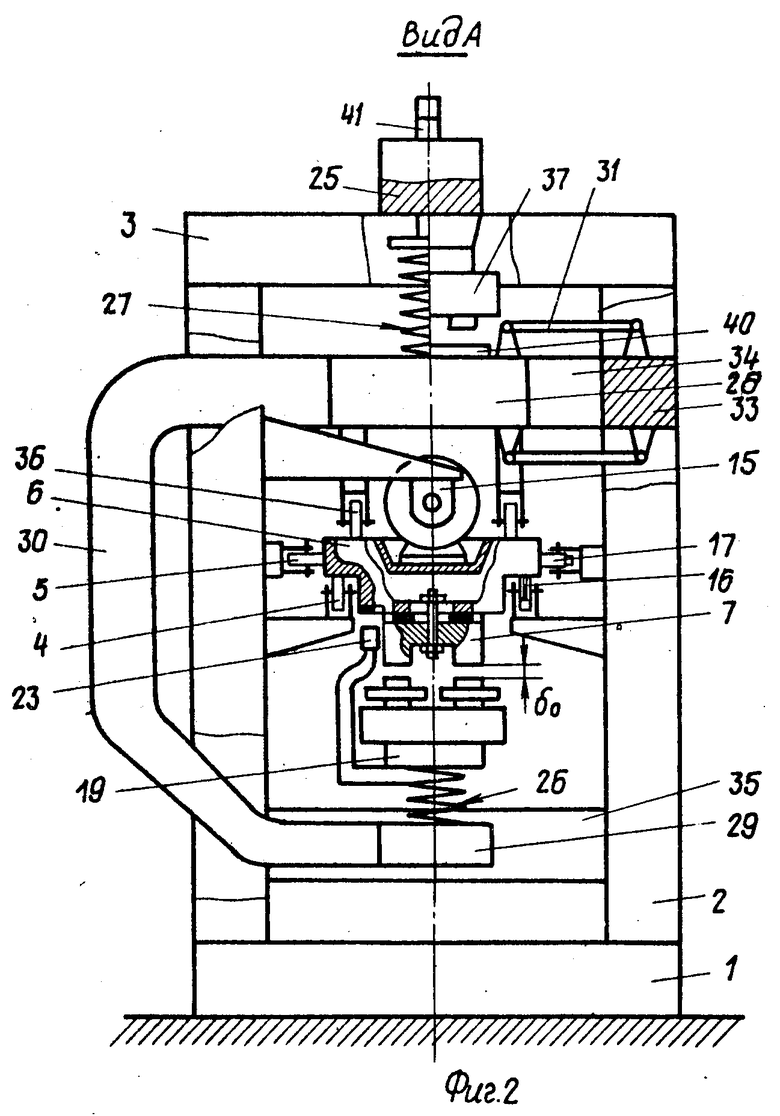
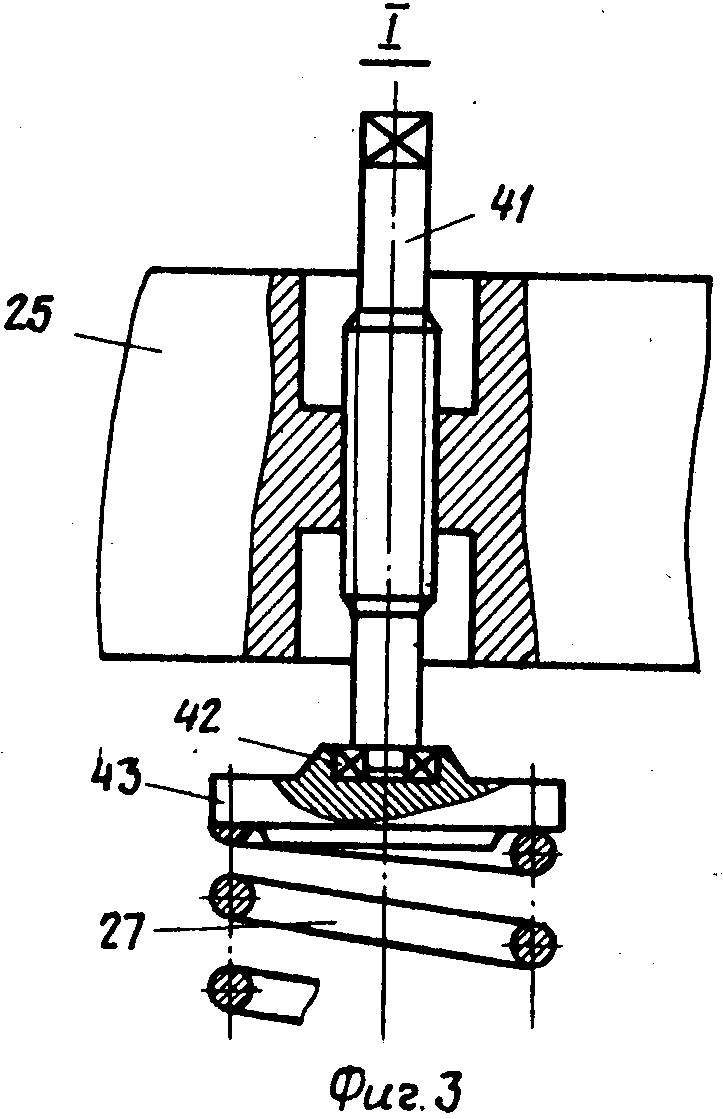
На фиг.1 изображена фронтальная проекция одного из вариантов стенда для исследования натурных устройств электромагнитного подвеса (ЭМП) и тяги совместно с натурными системами управления и механического подрессоривания; на фиг.2 профильная проекция этого стенда; на фиг.3 вариант конструктивного исполнения механизма, обеспечивающего загрузку модели тележки регулируемой вертикальной статической нагрузкой.
Основой стенда является станина (см. фиг.1 и 2), содержащая, например, горизонтальную прямоугольную раму 1, четыре вертикальные стойки 2, установленные по углам рамы, и две поперечные балки 3, связывающие пары стоек. На каждой стойке закреплена пара роликов: опорный 4 и направляющий 5. Этими роликами поддерживается и направляется вдоль стенда подвижная горизонтальная балка 6, моделирующая путевую структуру транспортной системы с электромагнитным подвешиванием. К нижней плоскости балки прикреплены вдоль ее оси ферромагнитные элементы 7 путевой структуры.
Так как стенд предназначен для исследования односторонних линейных индукторных электродвигателей (ОЛИД), выполняющих одновременно функции подвеса и тяги, то ферромагнитные элементы 7 модели путевой структуры выполнены в виде стальных шихтованных пакетов П-образного поперечного сечения и установлены вдоль балки 6 с постоянным шагом. Полюсные поверхности ферромагнитных элементов горизонтальны и обращены вниз. С целью регулирования уровня расположения ферромагнитных пакетов по высоте и обеспечения возможности имитации вертикальных неровностей пути между элементами 7 и балкой 6 могут устанавливаться прокладки 8. Система крепления (например, болтового) элементов 7 к балке 6 предусматривает также возможность горизонтального смещения элементов 7 перпендикулярно продольной оси балки с целью создания неровностей пути в плане.
При необходимости испытания на стенде других систем ЭМП и тяги к балке 6 модели путевой структуры может быть прикреплена непрерывная ферромагнитная или алюминиевая полоса прямоугольного П-образного или Ш-образного поперечного сечения.
Модель путевой структуры снабжена механизмом, обеспечивающим возвратно-поступательные перемещения балки 6 в направлении ее продольной оси. Этот механизм содержит электродвигатель 9, например, постоянного тока, закрепленный на одном из концов балки 6 и связанный с системой 10 питания и управления (СПУ 1) гибким кабелем 11. С валом электродвигателя 9 через муфту 12 связан ходовой винт 13, закрепленный в двух подшипниковых опорах 14 на балке 6. На резьбовой части ходового винта имеется гайка 15, жестко закрепленная на станине стенда.
С целью предотвращения перемещений балки 6 за пределы допустимого хода на ее концах установлены ограничители 16 и пара концевых выключателей 17, электрически связанных с СПУ 1 гибким кабелем 18.
Испытуемое в стенде устройство 19 ЭМП и тяги (индуктор ОЛИД) размещено ниже модели путевой структуры так, что между поверхностью его плоских, горизонтальных, обращенных вверх полюсов и ферромагнитными элементами 7 путевой структуры выдерживается заданный воздушный зазор. На чертежах индуктор ОЛИД изображен в нерабочем положении, которому соответствует воздушный зазор δо (см. фиг.1 и 2). При этом продольные оси устройства 19 и путевой балки 6 лежат в одной вертикальной плоскости. Кабелем 20 обмотки якоря и возбуждения индуктора электрически связаны с системой 21 управления (СУ), размещенной на выносном пульте управления. СУ 21 кабелем 22 электрически связана с датчиком 23 воздушного зазора. Датчик 23 жестко закреплен на индукторе ОЛИД и расположен на расстоянии измеряемого воздушного зазора ниже горизонтальной ферромагнитной полосы 24, закрепленной вдоль балки 6 модели путевой структуры (например, вдоль нижней плоскости балки).
Между поперечными балками 3 (см. фиг.2) станины стенда жестко закреплена продольная балка 25, моделирующая опорную часть кузова транспортного средства. Связь устройства 19 с опорной балкой 25 кузова осуществлена через натурную систему 26 поперечного механического прессования (условно изображена в виде пружин), модель тележки и натурную систему 27 вторичного механического подрессоривания (показана в виде пружин). На фиг.2 показан один из вариантов конструктивного исполнения модели тележки, включающей верхнюю 28 и нижнюю 29 продольно-горизонтальные балки и две изогнутые вертикальные балки 30. Для этого варианта упругие элементы обоих ярусов механического подрессоpивания и продольные оси горизонтальных балок модели тележки расположены в одной вертикальной плоскости с продольными осями устройства 19 и балки 6 модели путевой структуры.
Модель тележки дополнительно связана со станиной стенда механизмом, обеспечивающим плоскопараллельность ее вертикальных перемещений. Этот механизм может быть выполнен, например, в виде системы из двух пар горизонтальных тяг 31 и 32, каждая из которых шарнирно связана одним концом с моделью тележки, другим со станиной стенда. Тяги 31 одной пары расположены одна под другой в поперечно-вертикальной плоскости и связывают верхнюю продольную балку 28 модели тележки с дополнительной продольной балкой 33 станины стенда. Тяги 32 второй пары лежат в продольно-вертикальной плоскости и соединяют верхнюю 28 и нижнюю 29 продольные балки модели тележки с дополнительными поперечными балками 34 и 35 станины стенда.
При отключенной СУ 21 модель тележки опирается на балку 6 модели путевой структуры, например, колесами 36. Возможно также опирание модели тележки на станину стенда.
Между балкой 25, моделирующей опорную часть кузова, и верхней продольной балкой 28 модели тележки может быть установлено устройство для имитации возмущающих силовых воздействий, передаваемых тележке от кузова. Это устройство можно выполнить, например, в виде электромагнита 37, прикрепленного к балке 25 модели кузова, электрически связанного кабелем 38 с системой 39 питания и управления (СПУ 2) и взаимодействующего горизонтальными, обращенными вниз полюсами с горизонтальной ферромагнитной полосой 40, закрепленной на балке 28 модели тележки с соблюдением заданного воздушного зазора Δо≥δо (см. фиг. 1) по отношению к полюсам электромагнита.
Модель кузова может содержать механизм, обеспечивающий загрузку модели тележки регулируемой вертикальной статической нагрузкой. В простейшем варианте этот механизм включает несколько однотипных устройств, размещаемых над каждым из упругих элементов 27 системы вторичного подрессоривания. Каждое устройство (см. фиг.3) содержит вертикальный винт 41, размещенный в резьбовом отверстии балки 25, моделирующей опорную часть кузова. В верхней части винта имеется участок, удобный для захвата гаечным ключом, в средней резьба, а в нижней элементы сопряжения с упорным подшипником 42. Через этот подшипник винт связан с опорной площадкой 43 упругого элемента 27 (например, пружины) системы вторичного механического подрессоривания.
В зависимости от специфики проводимых исследований и решаемых при этом задач стенд может быть оборудован различными датчиками, измерительными устройствами и регистрирующей аппаратурой. В частности, при испытаниях ОЛИД необходимо осуществлять измерения следующих параметров: перемещения и ускорение индуктора; силу и мощность, потребляемые обмотки якоря и возбуждения; тяговое и подъемное усилия, развиваемые индуктором; перемещения и ускорения модели тележки; скорость перемещения балки, моделирующей путевую структуру; координату, характеризующую взаимное расположение индуктора и путевых элементов ОЛИД.
Стенд для исследования систем электромагнитного подвеса бесконтактных транспортных средств работает следующим образом.
С помощью винта 41 упругие элементы 27 вторичного подрессоривания сжимаются усилием, соответствующим статической нагрузке, передаваемой от кузова на устройство 19. При этом модель тележки опирается колесами 36 на балку 6 модели путевой структуры, а полюса устройства 19 располагаются с воздушным зазором δо≥30-40 мм по отношению к путевым ферромагнитным элементам 7. Такое состояние системы моделирует расположение элементов бесконтактного экипажа на стоянке при отключенном устройстве ЭМП.
Для выхода в режим левитации и испытания системы ЭМП отдельно от системы тяги в обмотки возбуждения индуктора подается постоянный ток от системы управления. При этом магнитное поле индуктора взаимодействует с ферромагнитными элементами 7 путевой структуры и создает подъемное (левитационное) усилие Fпод, направленное вверх и компенсирующее не только массу индуктора, но и нагрузку, передаваемую ему элементами кузова и тележки. Под действием левитационного усилия устройство 19 перемещается вверх и устанавливается на расстоянии рабочего зазора δ= 10-15 мм <δоот ферромагнитных элементов 7 пути. При этом часть левитационного усилия через упругие элементы 26 первичного механического подрессоривания передается на модель тележки, которая приподнимается вверх, дополнительно сжимая упругие элементы 27 вторичного подрессоривания. Дополнительное сжатие элементов 27 позволяет частично моделировать дополнительную нагрузку и индуктор от действия инерционных сил, неизбежно проявляющихся при поднятии кузова в момент выхода экипажа в режим левитации. После достижения устройства 19 рабочего зазора поджатие элементов 27 вторичного подрессоривания может быть уменьшено (отворачиванием винта 41).
В процессе поднятия модели тележки вверх ее колеса 36 выходят из состояния упора в путевую балку 6 и размещаются над этой балкой с некоторым воздушным зазором. Одновременно ферромагнитная полоса 40 приближается к полюсам электромагнита 37 и устанавливается по отношению к ним с зазором Δ= 15-20 мм <Δо, достаточным для передачи необходимых возмущающих воздействий от электромагнита на модель тележки.
Поддерживание устройства 19 на заданном рабочем зазоре обеспечивается системой управления, которая регулирует величину тока, протекающего в обмотках возбуждения ОЛИД, в соответствии с информацией датчика 23 зазора.
В зависимости от взаимного расположения устройства 19 и путевых элементов 7 испытуемое устройство ЭМП может создавать не только вертикальное подъемное усилие Fпод, но и крутящий момент М в продольно-вертикальной плоскости, стремящейся нарушить горизонтальность полюсов индуктора. Этот момент достигает максимальной величины в случае, когда над торцом сердечника индуктора размещен торец одного из ферромагнитных элементов пути (см. фиг.1), и равен нулю, когда ферромагнитный элемент пути размещен строго по центру индуктора.
Стенд позволяет проводить статические испытания ЭМП при любых возможных вариантах расположения индуктора относительно элементов пути. Для установки указанных элементов в нужное положение балка 6 перемещается по роликовым опорам 4 и 5 с помощью ходового винта 13, приводимого во вращение электродвигателем 9. Направление и частота вращения электродвигателя регулируются системой питания и управления.
Динамические испытания системы ЭМП могут проводиться в четырех режимах:
1) движения по идеально ровному пути;
2) движения по пути с неровностями плана и профиля;
3) движения в сочетании с возмущениями со стороны кузова;
4) левитации без движения с возмущениями со стороны кузова.
Имитация движения индуктора относительно пути обеспечивается перемещением с заданной скоростью балки 6, моделирующей путевую структуру, по опорно-направляющим роликам 4 и 5. Это перемещение происходит в пределах длины резьбы ходового винта 13. При приближении гайки 15 к концу резьбы ходового винта один из направляющих роликов 5 нажимает на концевой выключатель 17, который разрывает цепь питания электродвигателя 9, либо осуществляет его реверс.
Неровности профиля пути создаются установкой под путевые элементы 7 прокладок 8 различной толщины. Неровности пути в плане обеспечиваются за счет горизонтального смещения элементов 7 перпендикулярно продольной оси балки 6, например, в пределах овальности отверстий этой балки, предназначенных для прохода болтов крепления путевых элементов (см. фиг.2).
Имитация возмущающих усилий, передаваемых от кузова экипажа на его тележку, обеспечивается электромагнитом 37, взаимодействующим с ферромагнитной полосой 40 модели тележки. По обмоткам электромагнита пропускается переменный по величине ток, регулируемый системой питания и управления (СПУ 2). При помощи СПУ 2 возмущающим усилием могут быть заданы требуемые амплитуда и частота.
Для запуска в работу системы тяги обмотки якоря индуктора ОЛИД включаются через СУ в трехфазную цепь переменного тока. При этом в зоне зазора между сердечником индуктора и ферромагнитным элементом пути создается "бегущее" магнитное поле. Взаимодействие этого поля с элементами пути приводит к появлению продольного усилия Fтяг, используемого для тяги.
Системы ЭМП и тяги могут работать одновременно. Их совместные испытания на стенде можно проводить как в статическом, так и в динамическом режиме, аналогично испытаниям изолированной системы ЭМП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ СИСТЕМ ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1984 |
|
SU1232019A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО НА ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКЕ | 1982 |
|
SU1108670A1 |
| Линейный синхронный электродвигатель | 1985 |
|
SU1350779A1 |
| ТРАНСПОРТНАЯ СИСТЕМА С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ "ТРАНСЛИД-МИИТ" | 2001 |
|
RU2206465C1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2294296C1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2294297C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2220863C2 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| СИСТЕМА НАКЛОНА КУЗОВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2011 |
|
RU2475391C1 |
| Линейный синхронный электродвигатель | 1991 |
|
SU1815755A1 |
Изобретение относится к стендам для испытания транспортных средств и их узлов, в частности к стендам для исследования систем тяги и электромагнитного подвеса бесконтактных экипажей. Цель изобретения повышение точности. Имитация движения индуктора относительно пути обеспечивается перемещением с заданной скоростью балки, имитирующей путевую структуру. Это перемещение происходит в пределах длины резьбы ходового винта. При приближении гайки к концу резьбы ходового винта один из направляющих роликов нажимает на концевой выключатель, который разрывает цепь питания электродвигателя, либо осуществляет его реверс. 3 ил.
СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ, содержащий станину с установленной на ней моделью путевой структуры, включающей соединенный с механизмом перемещения несущий элемент с закрепленными на нем ферромагнитными элементами для взаимодействия с расположенными с зазором относительно них элементами электромагнитного подвеса, имитатор транспортного средства, включающий в себя механически соединяемые с элементами электромагнитного подвеса связанную со станиной модель кузова и механически связанную с ней соединенную со станиной с возможностью перемещения в вертикальной плоскости относительно последней модель тележки, отличающийся тем, что, с целью повышения точности, несущий элемент модели путевой структуры выполнен в виде балки, установленной с возможностью продольного возвратно-поступательного перемещения, при этом механизм перемещения имеет установленную на станине гайку и пропущенный через нее и связанный с валом двигателя ходовой винт, а модель кузова связана со станиной жестко.
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ СИСТЕМ ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1984 |
|
SU1232019A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
