113
Изобретение относится к электротехнике, а именно к электрооборудованию транспортных средств, с электро- магнитным подвесом.
Целью является улучшение тягового усилия в режиме пуска.
На фиг.1 и 2 показана первичная часть (отдельный индуктор) первичного элемента и вторичная часть (ферромаг- нитные пакеты) одностороннего линей-- ного индукторного двигателя в двух проекциях; на фиг.З - расположение отдельных индукторов в группе; на
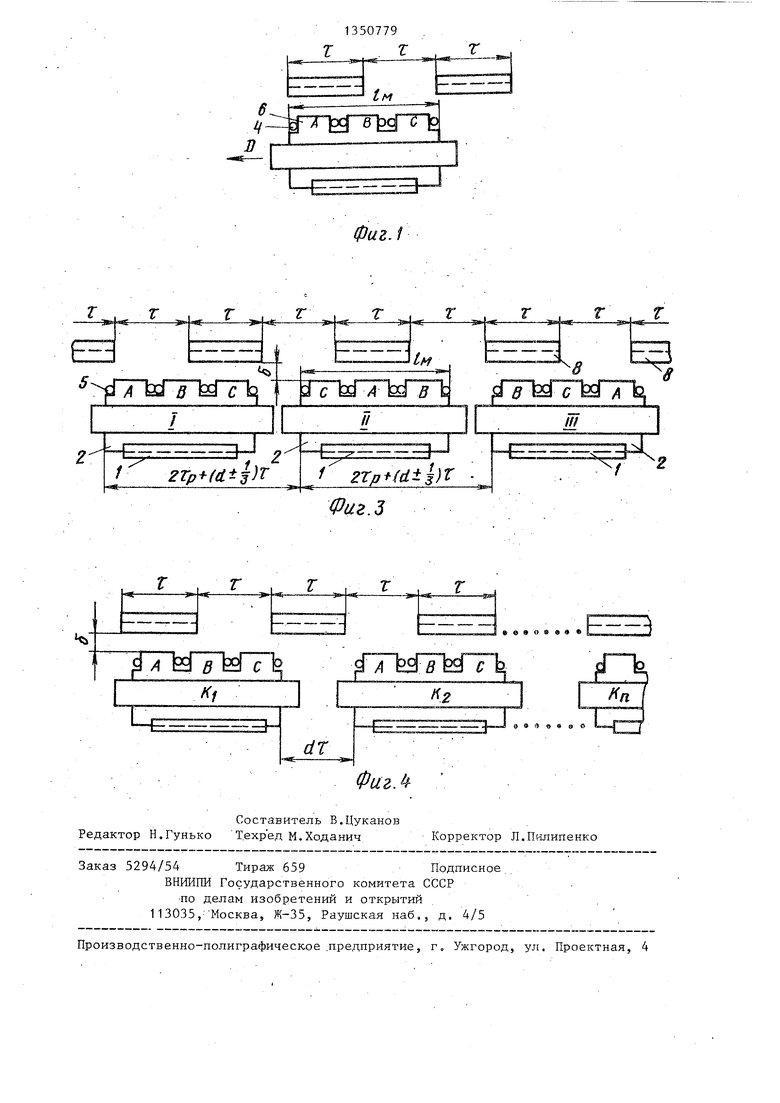
фиг.4 - расположение групп индукторов 5 (фиг.4) с расстоянием между группами
на подвижном элементе.
Индуктор 1 (фиг,1-2) содержит П-образньй магнитопровод 2 с двумя стержнями 3, в пазах 4 которых размещена сосредоточенная т-фазная (т 3) обмотка якоря 5, охватывающая зубцы б 5 с числом пазов на полюс и фазу ,5« Обмотка 7 возбулодения охватывает стержни 3 магнитопровода 2. Вторичная часть двигатапя состоит из ферромагнитных пакетов 8, дискретно уложенных в пути через двойное полюсное деление обмотки якоря 2С на расстоянии воздушного зазора d относи20
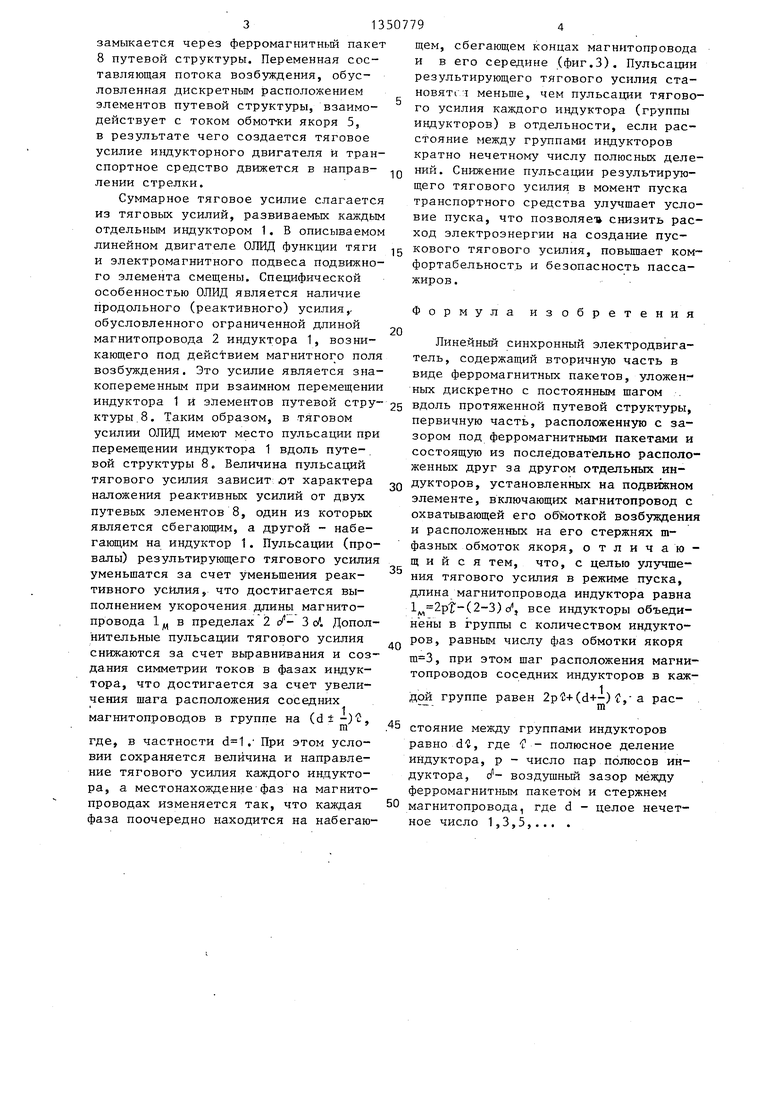
магнитопроводотз 2, равным dl;, где т,е на месте индуктора К размещается группа из трех индукторов 1, 11,111 согласно фиг.З,на месте индуктора К - группа .из трех следующих индукторов и ТоДо до где К„ п последняя группа индукторов,, an- це лее число, кратное 6 (для ), Согласно фиг.4 могут быть размещены не 25 только группы индукторов, но и одиночные индукторы, если их количество на подвижном элементе ограничено (2 4) шт.
При размещении индукторов в соот- тельно индукторов 1. Длина магнитопро- до ветствии с фиг.4 ЭДС обмотка якоря вода 2 индуктора 1 со стороны воздушного зазора справна - (2-3) с/, где р - число пар полюсов индуктора.
Обычно на подвижном элементе устанавиндуктора Kj по фазе будет сдвинута на 180° по отношению к ЭДС, обмотки якоря индуктора К.В этом случае для сохранения направления тягового уси- ливается несколько отдельньцс индукто- , индуктора К, таким же, как и в
индукторе К , направление .тока в катушках всех фаз обмотки якоря индуктора К,, должно быть изменено на противоположное. Например, если в катуш- 40 ке фазы А индуктора К направление токов выбрано как ( + ) А (О, то в
ров, в этом случае они объеди11яются в группы (фиг,2).
Первичная часть двигателя состоит из ряда отдельных индукторов, расположенных на подвижном элементе после довательно друг за другом с определенным интервалом. Шар расположения соседних магнитопроводов 2 в группах
катушке фазы А индуктора К оно должно быть противоположно. При определении расстояния между индукторами ве- 45 личина целого нечетного числа d выбирается из условия возможности разме- заданного числа индукторов (по силе тяги) на подвижном элементе с учетом конструктивных особенностей,, .Электродвигатель работает следующим образом.
при. равен 2 tp+(d + -) L, где d целое положительное нечетное число (например, , фиг.2), выбирается, исходя из свободной длины подвижного элемента. Свободная длина определяется разницей между длиной подвижного элемента и суммарной длиной групп индукторов и других агрегатов под днищем- экипажа. Разделив свободную длину подвижного элемента на f и округлив результаты до ближайшего нечетного числа, получают значение параметра d, .Дпина пакета 8 вторичной части и расстояние между пакетами 8 равны полюсному делению 1, а шаг между пакетами
8 равен двум. С целью создания направления тягового усилия в одну сторону, фазы обмотки якоря А,Б,,С по отношению к магнитопроводам индукторов IjIIjIII занимают различное положение (фиг.З), при этом порядок следования фаз на всех индукторах 1 сохраняется один и тот же. Расположенные в соответствии с фиг.З индукторы в количестве, равном числу фаз обмотки якоря, образуют группу.
Сформированные в группы индукторы располагают на. подвижном элементе
магнитопроводотз 2, равным dl;, где т,е на месте индуктора К размещается группа из трех индукторов 1, 11,111 согласно фиг.З,на месте индуктора К - группа .из трех следующих индукторов и ТоДо до где К„ п последняя группа индукторов,, an- целее число, кратное 6 (для ), Согласно фиг.4 могут быть размещены не только группы индукторов, но и одиночные индукторы, если их количество на подвижном элементе ограничено (2 4) шт.
катушке фазы А индуктора К оно должно быть противоположно. При определении расстояния между индукторами ве- 5 личина целого нечетного числа d выбирается из условия возможности разме- заданного числа индукторов (по силе тяги) на подвижном элементе с учетом конструктивных особенностей,, .Электродвигатель работает следующим образом.
Обмотка 7 возбуждения к;зждого индуктора 1 питается постоянньам током, а обмотка якоря 5 каждого индуктора 1 - трехфазньпч переменным током. Магнитный поток возбуждения Ф, созданный обмоткой 7 возбуждения, проходит по спинке магнитопровода 2, его стержням 3, через воздушные зазоры d и
0
5
31
замыкается через ферромагнитный паке 8 путевой структуры. Переменная составляющая потока возбуждения, обусловленная дискретным расположением элементов путевой структуры, взаимодействует с током обмот-ки якоря 5, в результате чего создается тяговое усилие индукторного двигателя и транспортное средство движется в направлении стрелки.
Суммарное тяговое усилие слагаетс из тяговых усилий, развиваемых кажды отдельным индуктором 1. В описываемо линейном двигателе ОЛИД функции тяги и электромагнитного подвеса подвижного элемента смещены. Специфической особенностью ОЛИД является наличие продольного (реактивного) усилия,, обусловленного ограниченной длиной магнитопровода 2 индуктора 1, возникающего под действием магнитного пол возбуждения. Это усилие является знакопеременным при взаимном перемещени индуктора 1 и элементов путевой структуры. 8. Таким образом, в тяговом усилии ОЛИД имеют место пульсации пр перемещении индуктора 1 вдоль путе-. вой структзфы 8. Величина пульсаций тягового усилия зависит от характера наложения реактивных усилий от цвух путевых элементов 8, один из которых является сбегающим, а другой - набегающим на индуктор 1. Пульсации (провалы) результирующего тягового усили уменьшатся за счет уменьшения реактивного усилия, что достигается выполнением укорочения длины магнитопровода 1;ц в пределах 2 с/- 3 сЛ Дополнительные пульсации тягового усилия снижаются за счет выравнивания и создания симметрии токов в фазах индуктора, что достигается за счет увеличения шага расположения соседних
магнитопроводов в группе на (d± -) 2,
где, в частности . При этом условии сохраняется величина и направление тягового усилия каждого индуктора, а местонахождение фаз на магнито проводах изменяется так, что каждая фаза поочередно находится на набегаю
щем, сбегающем концах магнитопровода и в его середине (фиг.З). Пульсации результирующего тягового усилия ста- HOBHTi :i меньше, чем пульсации тягового усилия каждого индуктора (группы индукторов) в отдельности, если расстояние между группами индукторов кратно нечетному числу полюсных делений. Снижение пульсации результирующего тягового усилия в момент пуска транспортного средства улучшает условие пуска, что позволяет снизить расход электроэнергии на создание пускового тягового усилия, повьщ1ает комфортабельность и безопасность пассажиров.
Формула изобретения
Линейный синхронный электродвигатель, содержащий вторичную часть в виде ферромагнитных пакетов, уложенных дискретно с постоянным шагом .
вдоль протяженной путевой структуры, первичную часть, расположенную с зазором под ферромагнитными пакетами и состоящую из последовательно расположенных друг за другом отдельных индукторов, установленных на подвижном элементе, включающих магнитопровод с охватывающей его обмоткой возбуждения и расположенных на его стержнях га- фазных обмоток якоря, отличающийся тем, что, с целью улучшения тягового усилия в режиме пуска, длина магнитопровода индуктора равна (2-3) с/, все индукторы объединены в группы с количеством индукторов, равным числу фаз обмотки якоря
, при этом шаг расположения магни- топроводов соседних индукторов в каж1.
дой группе равен 2p J+(d+-) С,-а рас- -m
45
50
стояние между группами индукторов равно d, где Г - полюсное деление индуктора, р - число пар полюсов индуктора, (У- воздушный зазор между ферромагнитным пакетом и стержнем магнитопровода, где d - целое нечетное число 1,3,5,... .
1350779
Г г . г
м
J7
м
Е
1-11..-.- -....-J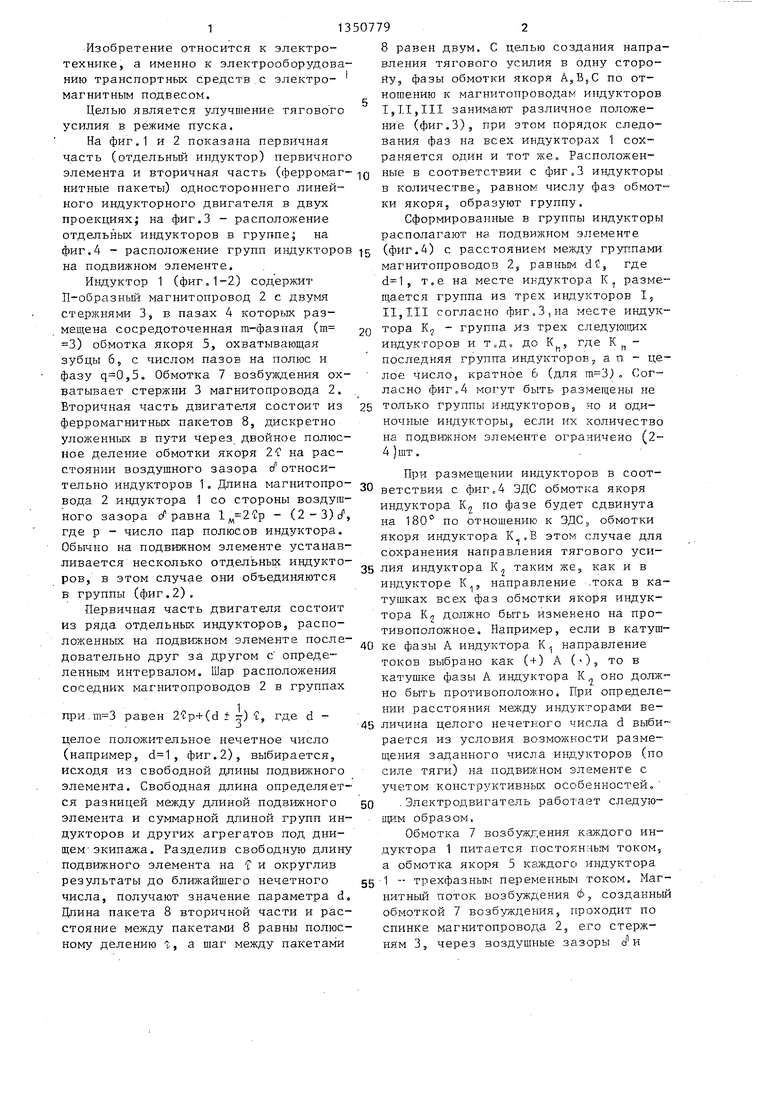
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный синхронный электродвигатель | 1983 |
|
SU1169099A1 |
| Линейный синхронный электродвигатель | 1988 |
|
SU1684871A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
| Линейный многофазный двигатель | 1978 |
|
SU1166232A1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ БЕСКОНТАКТНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437202C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437201C1 |
| ЛИНЕЙНЫЙ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
SU1371370A1 |
| Линейный синхронный электродвигатель | 1991 |
|
SU1815755A1 |
| Линейный электрический двигатель | 1978 |
|
SU792511A1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
Изобретение относится к электротехнике, к электрооборудованию транспортных средств с электромагнитным подвесом. Цель состоит в улучшении пускового момента. Индуктор 1 устройства содержит П-образный магнитопро- вод 2 с двумя стержнями 3 и обмоткой возбуждения 7, в пазах которых уложена сосредоточенная т-фазная обмотка якоря 5, охватывающая его зубць. Вторичная часть состоит из ферромагнитных пакетов 8, уложенных дискретно. Дпя уменьшения пульсаций тягового .- усилия за счет уменьшения реактивного усилия магнитопровод 2 вьшолнен згкороченным, его длина равна С- - (2-3)сП, где р - число пар полюсов индуктора; рабочий воздушный зазор . Пульсации тягового усилия уменьшаются за счет выравнивания и симмет- рирования токов в фазах индуктора увеличением шага 1 размещения соседних, магнит опр оводов 2 на (dtl/m), где ,3,5,..., m - количество фаз. 4 ил. СО с СО СП О -vj vl : ЧЕЕЗГ: Фаз. 2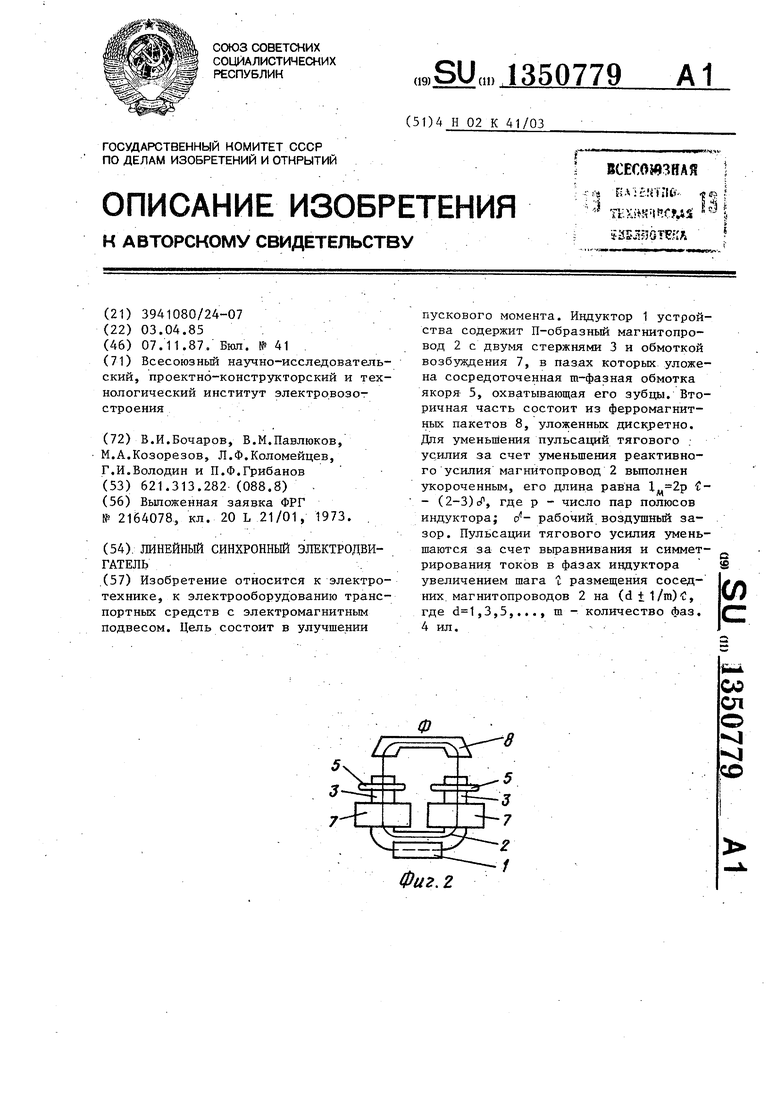
г
-аН-«6-.3 +-«-- S - ЭВ 4 «S {«E::да 4ве
;-dTMT№
г
г г
S {«E::да 4ве
8
В КЗ ifba и
f
sJ
j 2Tp+fet±i)T
э
)r
№a.J
Ш
ТТМТМТЪ /TMTMT
л-/
э
Составитель В.Цуканов Редактор Н.Гунько Техред М.Ходанич Корректор Л.Пилипенко
Заказ 5294/54 Тираж 659Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий .,
113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое .предприятие, г, Ужгород, ул. Проектная, 4
//
///
3
x
X
J
.
eeeoeeee
r
2
/r/i
e 9 e e Э О Lmj
. 4
| СПОСОБ ДИАГНОСТИКИ АРТЕРИАЛЬНОЙ ГИПЕРТЕНЗИИ И ОПРЕДЕЛЕНИЯ ЕЕ ТЯЖЕСТИ ПО ДАННЫМ СУТОЧНОГО МОНИТОРИРОВАНИЯ АРТЕРИАЛЬНОГО ДАВЛЕНИЯ | 2000 |
|
RU2164078C1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| . | |||
