1
(21)4389897/25-03
(22)10.03.88
(46) 30.01.90. Бюл. № 4
(71)Воронежский инженерно-строительный институт
(72)М. А. Берман, В. Д. Волков, Л. Г. Гольденберг и В. Г. Пыльнев
(53)622.767.555(088.8)
(56)Авторское свидетельство СССР № 326001, кл. В 07 В 13/00, 1970.
Авторское свидетельство СССР № 831223, кл. В 07 В 13/00, 1981.
(54)ВИБРАЦИОННЫЙ СЕПАРАТОР
(57)Изобретение относится к вибрационной технике и м.б. использовано для классификации сыпучих или взвешенных в жидкости твердых материалов по крупности. Цель изобретения - повышение эффективности сепарации путем изменения траектории движения решета. На станине 1 закреплены перпендикулярно один другому
электромагниты (ЭМ) 2 и 3 вибропривода и решето 4, расположенное горизонтально на упругих элементах. К нему прикреплены якоря 6 и 7 ЭМ 2 и 3. В трубопроводе 9 под решетом установлен датчик 10 расхода материала нижнего класса, выход которого через преобразователь 11 расход-напряжение, экстремальный регулятор 12, модулятор 13, фазосмещающий блок 14, формирователи 16 и 18 управляющих импульсов и усилители 17 и 19 мощности подключен % ЭМ 2, 3. По сигналу с датчика 10 экстремальный регулятор 12 формирует сигнал, который после преобразования в модуляторе 13 поступает на управляющий вход фазосме- щающего блока 14, другой вход которого соединен с источником 15 переменного напряжения. За счет этого производится фазовый сдвиг и решето 4 осуществляет различные перемещения от линейного до кругового в зависимости от состава классифицируемого материала. 5 ил.
SS
с/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство питания электромагнитного вибровозбудителя | 1989 |
|
SU1644103A2 |
| Смеситель для сыпучих материалов | 1989 |
|
SU1726000A1 |
| Способ отделочно-зачистной обработки изделий в контейнере | 1989 |
|
SU1726212A1 |
| Устройство для управления преобразователем с нулевыми вентилями | 1976 |
|
SU606197A1 |
| Устройство для формования теплоизоляционных изделий | 1988 |
|
SU1523354A1 |
| Система автоматического управления циклом измельчения | 1982 |
|
SU1098570A1 |
| Устройство для питания синхронно-синфазного электромагнитного вибропривода | 1980 |
|
SU936289A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Тарельчатый гранулятор | 1990 |
|
SU1717204A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773298C1 |
Изобретение относится к вибрационной технике и может быть использовано для классификации сыпучих или взвешенных в жидкости твердых материалов по крупности. Цель изобретения - повышение эффективности сепарации путем изменения траектории движения решета. На станине 1 закреплены перпендикулярно один другому электромагниты /ЭМ/ 2 и 3 вибропривода, и решето 4, расположенное горизонтально на упругих элементах. К нему прикреплены якоря 6 и 7 ЭМ 2 и 3. В трубопроводе 9 под решетом установлен датчик 10 расхода материала нижнего класса, выход которого через преобразователь 11 расход-напряжение, экстремальный регулятор 12, модулятор 13, фазосмещающий блок 14, формирователи 16, 18 управляющих импульсов и усилители 17, 19 мощности подключен к ЭМ 2, 3. По сигналу с датчика 10 экстремальный регулятор 12 формирует сигнал, который после преобразования в модуляторе 13 поступает на управляющий вход фазосмещающего блока 14, другой вход которого соединен с источником 15 переменного напряжения. За счет этого производится фазовый сдвиг и решето 4 осуществляет различные перемещения от линейного до кругового в зависимости от состава классифицируемого материала. 5 ил.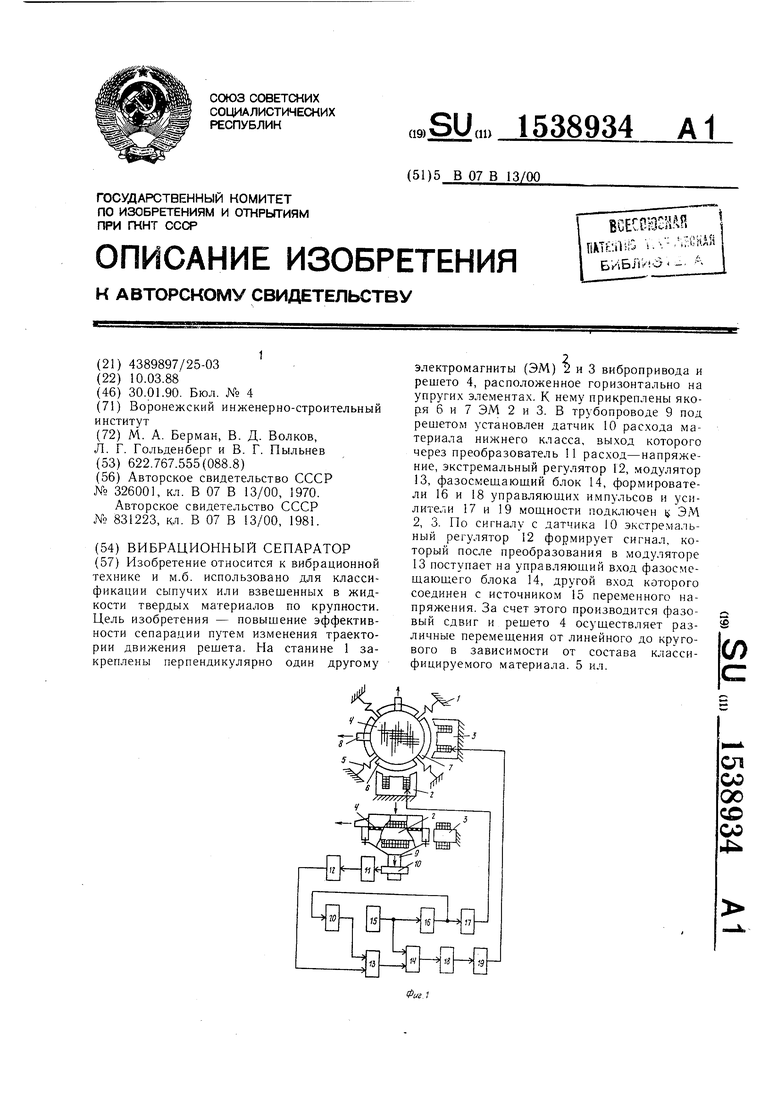
ел со оо
0
со
4
Изобретение относится к вибрационной классификации сыпучих или взвешенных в жидкости твердых материалов по крупности и может быть использовано в сельскохозяйственном машиностроении, в литейном производстве, в порошковой металлургии, в огнеупорной, химической, пищевой и других отраслях промышленности.
Целью изобретения является повышение эффективности сепарации путем изменения траектории движения решета.
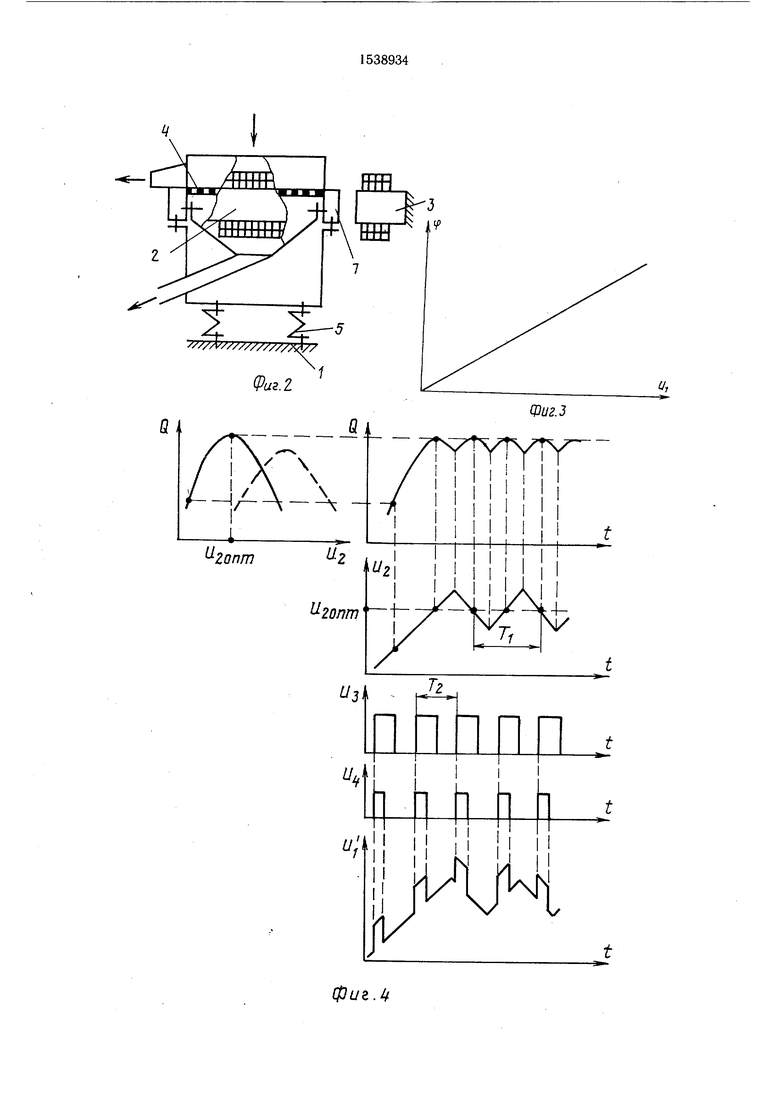
На фиг. 1 изображена функциональная cfxewa устройства; на фиг. 2 - пример выполнения сепаратора с вертикальной установкой упругих элементов; на фиг. 3 - статическая характеристика фазосмещающего устройства; на фиг. 4 и 5 - временные диаграммы работы сепаратора.
Вибрационный сепаратор (фиг. 1) содержит станину 1, на которой закреплены перпендикулярно друг другу первый 2 и второй 3 электромагниты. Горизонтально расположенное решето 4 связано со станиной 1 упругими элементами 5, которые могут быть расположены как горизонтально (фиг. 1), так и вертикально (фиг. 2). С решетом жестко связаны первый 6 и второй 7 якоря, которые расположены с зазором относительно электромагнитов, а также лотки 8 для пыхода материала верхнего класса. В трубопроводе 9 для выхода материала нижнего класса установлен датчик 10 расхода материала нижнего класса через преобразователь 11 расход - напряжение и экстремальный регулятор 12, связанный с первым входом модулятора 13. Выход модулятора 13 соединен с первым входом фазосмещающего стройства 14, второй вход которого подключен к,источнику 15 переменного напряжения и через первый формирователь 16 управляющих импульсов и первый усилитель 17 мощности связан с первым электромагнитом 2. Выход фазосмещающего блока 14 через второй формирователь 18 управляющих импульсов и второй усилитель 19 мощности соединен с вторым электромагнитом 3, а выход первого формирователя 16 правляющи. импульсов через од- новибратор 20 подключен к второму входу модулятора 13.
На фиг. 3 обозначено: U - напряжение па первом входе фазосмещающего устройства 14; с( - фазовый сдвиг между напряжениями на втором входе и выходе фазосмещающего блока 14.
На фиг. 4 обозначено: Q - расход материала нижнего класса; 6/2 - напряжение на выходе экстремального рег лято- ра 12; б/ими - оптимальное значение этого напряжения; Uл - напряжение на выходе первого формирователя 16 управляющих импульсов; 6/4 - напряжение на первом входе фазосмещающего блока 14 при уровневой модуляции выходного напряжения
6/2 экстремального регулятора 12; Т - период поисковых колебаний экстремального регулятора 12; Tz - период следования импульсов, поступающих на электромагниты 2 и 3; / - время.
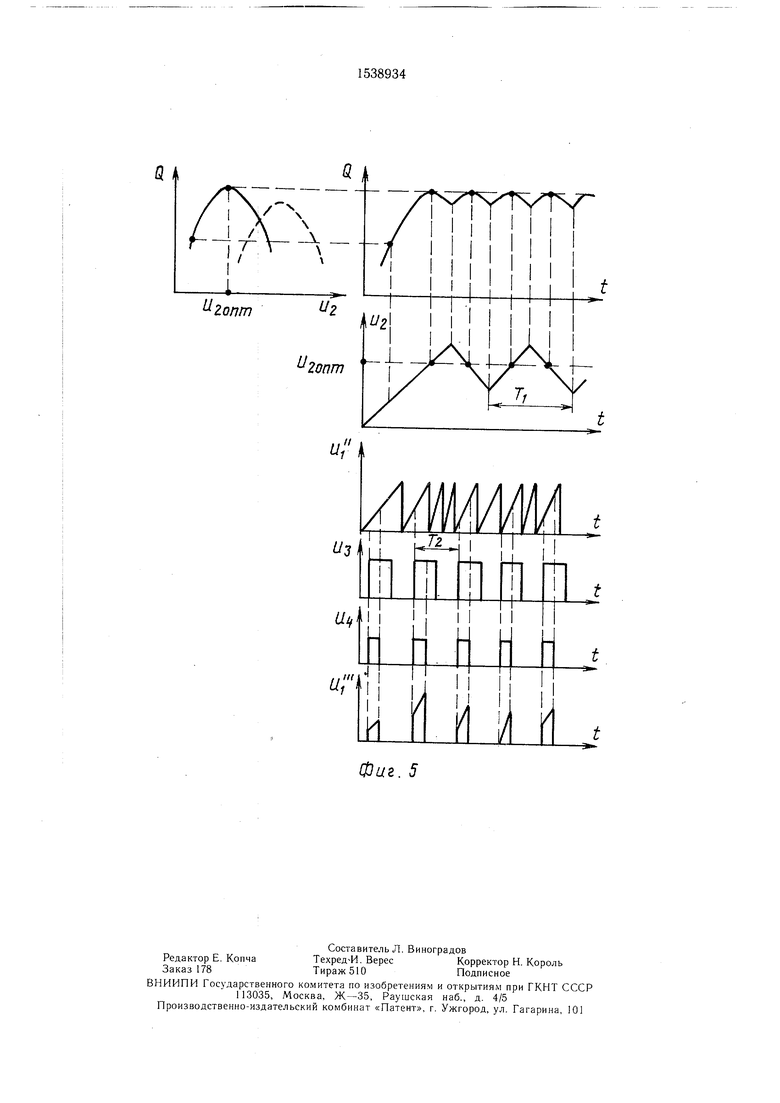
На фиг. 5 обозначено: Q - расход материала нижнего класса; 6/2 - напряжение на выходе экстремального регулятора 12; 6/2°лг - оптимальное значение этого напряжения; 6/ - напряжение на выходе первого формирователя 16 управляющих импульсов; 6/4 - напряжение на выходе одно- вибратора 20; LJ - напряжение на первом входе фазосмещающего устройства 14 при частотной модуляции выходного напряжения 6/2 экстремального регулятора 12 и отсутствии напряжения 6/4, U - напряжение на первом входе фазосмещающего бло- ка 14 при частотной модуляции выходного напряжения 6/2 экстремального регулятора
0 12 и наличии напряжения 6/4; Т - период поисковых колебаний экстремального регулятора 12; Т-2 - период следования импульсов, поступающих на электромагниты 2 и 3; / - время.
Вибрационный сепаратор работает сле5 дующим образом.
На -первый электромагнит 2 (фиг. 1) с первого усилителя 17 мощности и на второй электромагнит 3 с второго усилителя 19 мощности поступают последовательности одно- полярных импульсов напряжения, имеющие одинаковую, частоту следования импульсов. Амплитуды импульсов в обеих последовательностях также одинаковы, однако импульсы второй последовательности сдвинуты относительно импульсов первой последовательности на некоторый фазовый угол ср. В первом 2 и втором 3 электромагнитах возникают импульсы тягового усилия, за счет которых первый 6 и второй 7 якоря стремятся сместиться в сторону уменьшения зазора между ними и электромагнитами 2
0 и 3. При отсутствии механической связи между якорями и наличии упругой подвески каждый якорь совершал бы гармонические колебания. Поскольку в сепараторе первый 6 и втойрой 7 якоря и решето 4 механически связаны между собой, т. е. образуют единую конструкцию, установленную на упругих элементах 5, связанных со станиной 1, а электромагниты 2 и 3 расположены перпендикулярно друг другу, якоря с решетом совершают периодические коQ лебания по траектории, форма которой зависит от величины фазового сдвига ср между последовательностями импульсов, поступающими на первый 2 и второй 3 электромагниты. При и траектория движения будет прямолинейной, при
5 - круговой, при остальных значениях угла ф - эллиптический, при этом форма эллипса будет зависеть от величины угла q.
5
При этом упругие элементы 5 могут быть расположены как горизонтально (фиг. 1), так и вертикально (фиг. 2). Во втором случае эффективность сепарации несколько возрастает за счет появления вертикальной составляющей в движении решета, обусловленной работой упругих элементов 5 на изгиб. Однако во втором случае возрастает объем производственных помещений, занимаемый сепаратором.
Питание электромагнитов 2 и 3 последовательностями однополярных импульсов по сравнению с питанием гармоническим напряжением позволяет улучшить их работу (уменьшает постоянную составляющую в колебаниях якоря, увеличивает амплитуду ко- лебаний якоря).
Для формирования двух последователь- ностей однополярных импульсов, сдвинутых по фазе, используются источник 15 пере- менного напряжения, фазосмещающий блок 14, первый 16 и второй 18 формирователи управляющих импульсов, первый 17 и второй 19 усилители мощности. Источник 15 переменного напряжения определяет частоту колебаний решета. При использовании, в качестве источника переменного напряжения сети переменного тока колебания решета 4 будут происходить с частотой сети. При использовании в качестве источника переменного напряжения отдельного регулируемо- го по частоте генератора гармонических колебаний частота колебаний решета будет определяться настройкой генератора. Второй вариант предпочтительнее, так как позволяет выбрать частоту колебаний решета, близкую к его резонансной частоте, что по- вышает амплитуду колебаний решета и эффективность сепарации.
С выхода источника 15 переменного напряжения сигнал, изменяющийся по гармоническому закону, поступает на вход первого формирователя 16 управляющих импуль- сов и через фазосмещающий блок 14 на вход второго формирователя 18 управляющих импульсов. На выходах формирователей появляются сдвинутые по фазе последовательности однополярных прямоугольных импульсов напряжения, частота следования которых равна частоте входных гармонических сигналов. В усилителях 17 и 19 мощности, в качестве которых используются, например, трехфазные мостовые тирдсторные коммутаторы, импульсы усиливаются по мощности и поступают на электромагниты 2 и 3. В зависимости от сдвига сигнала по фазе, осуществляемого в фазосмещающем блоке 14, якоря 6 и 7 с решетом 4 совершают периодические колебания по определенной траектории.
При подаче на колебающееся решето 4 исходного материала, подлежащего сепарации, происходит его разделение на классы
Q
5
0 5 Q
0 Q 5
5
по крупности. Нижний класс транспортируется по трубопроводу 9, верхний класс - по лоткам 8 (фиг. 1).
Для осуществления экстремального регулирования в трубопроводе 9 (фиг. 1) установлен датчик 10 расхода материала нижнего класса и введены преобразователь 11 расход-напряжение и экстремальный регулятор 12. Выбор датчика 10 расхода определяется особенностями исходного материала, например, при классификации сыпучих материалов используется подпружиненный лоток. Экстремальный регулятор может использоваться с любым принципом действия.
Выходной сигнал экстремального регулятора 12 после дополнительного преобразования в модуляторе 13 поступает на управляющий вход фазосмещающего блока 14, другой вход которого соединен с источником 15 переменного напряжения. Фазосмещаю- щее устройство выполнено управляемым, т. е. фазовый сдвиг р сигнала, поступающего на его второй вход с источника 15 переменного нгпряжения, пропорционален величине напряжения U на его управляющем входе (фиг. 3). При этом диапазон изменения напряжения U выбран таким, чтобы фазовый сдвиг ф мог изменяться в пределах от 0 до л/2, т. е. чтобы траектория движения решета могла изменяться от прямолинейной до круговой. Экстремальный ре- 12 при работе сепаратора установит такой фазовый сдвиг ф, т. е. такую траекторию движения решета 4, которая обеспечит получение максимально возможного в данных условиях расхода материала нижнего класса.
Характерной особенностью сепаратора является введение «пульсаций траектории движения решета.
Для осуществления «пульсаций траектории используется модулятор 13 (фиг. 1), включенный между выходом экстремального регулятора 12 и первым входом фазосмещающего блока 14, и одновибратор 20, со стороны входа подключенный к выходу первого формирователя 16 управляющих импульсов, а со стороны выхода - к второму входу модулятора 13.
Вид модуляции (по уровню, по частоте) выходного напряжения экстремального регулятора 12 определяется характеристикой исходного материала, поступающего на решето.
Экспериментальная проверка показывает, что при классификации твердых сыпучих материалов наиболее эффективна модуляция выходного напряжения экстремального регулятора по уровню, а при классификации взвешенных в жидкости твердых материалов - по частоте.
Построение модулятора 13 как при уров- невой, так и при частотной модуляции
выходного напряжения экстремального регулятора 12 осуществляется известными техническими средствами.
Для осуществления уровневой модуляции (фиг. 4) модулятор 13 выполняется в виде сумматора двух сигналов - выходного напряжения Uz экстремального регулятора 12, поступающего на первый вход модулятора 13, и напряжения 1/4 (фиг. 4), поступающего с выхода одновибратора 20 на второй вход модулятора 13. Напряжение Uz (фиг. 4) представляет собой поисковые колебания экстремального регулятора, а напряжение 11$ - последовательность импульсов фиксированной длительности и фиксированного уровня, появление которых синхронизировано с появ- импульсов Us (фиг. 4) на выходе пйрвого формирователя 16 управляющих импульсов. Синхронизация необходима в связи с тем, что напряжение, поступающее на электромагниты, является дискретным (последовательность однополярных импульсов) и, следовательно, сигнал, заставляющий «пульсировать траекторию движения решета, должен поступать на интервалах времени, когда электромагнитами можно управлять, т. е. когда имеются импульсы Uz- При этом из-за инерционности сепаратора пефиод Т (фиг. 4) поисковых колебаний экстремального регулятора существенно больше периода Тг (фиг. 4) следования импульсов Uz, поступающих на электромагниты, т. е. в течение одного периода поисковых колебаний будут происходить частые изменения по уровню напряжения U (фиг. 4) на входе фазосмещающего блока 14. Соответственно происходят изменения фазового сдвига ф, т. е. возникают «пульсации траектории движения решета 4 относительно «базовой траектории, способствующие повышению эффективности сепарации.
Для осуществления частотной модуляции (фиг. 5) модулятор 13 выполняется в виде управляемого по двум входам генератора пилообразного напряжения. При этом напряжение Uz (фиг. 5) с выхода экстремального регулятора 12 поступает на первый вход модулятора 13 и приводит к тому, что на выходе модулятора возникает пилообразное напряжение U (фиг. 5) постоянного уровня, но с частотой, пропор- цюнальной уровню напряжения 14, а напряжение U с выхода одновибратора 20 поступает на второй вход модулятора 13 и приводит к тому, что на выходе модулятора 13 напряжение появляется только на интервалах времени, в течение которых имеются импульсы Ј/4 (фиг. 5, кривая / % Таким образом, при частотной модуляции
напряжение на входе фазосмещающего блока 14 (фиг. 5, кривая iff) будет иметь вид последовательности импульсов, вершина которых имеет различный наклон. Поскольку напряжение между импульсами равно нулю,
траектория движения решета будет прямолинейной с «пульсациями, частота которых равна частоте следования импульсов Us на выходе первого формирователя 16 управляющих импульсов. Особенно эффективным такой режим движения является при классификации взвешенных в жидкости твердых частиц.
Формула изобретения
0
Вибрационный сепаратор, содержащий станину, источник переменного напряжения, вибропривод с электромагнитами и якорем и установленное на упругих элементах решето, отличающийся тем, что, с целью повышения эффективности сепарации путем изме5 нения траектории движения решета, устройство снабжено преобразователем расход-напряжение, датчиком расхода материала нижнего класса, экстремальным регулятором, одновибратором, фазосмещающим блоком, двумя формирователями управляю0 щих импульсов, двумя усилителями мощности и модулятором, причем электромагниты вибропривода закреплены на станине перпендикулярно друг другу, а их якоря соединены с решетом, в нижней части которого установлен датчик расхода материала
5 нижнего класса, выход которого через последовательно соединенные преобразователь расход-напряжение и экстремальный регулятор подключен к первому входу модулятора, к второму входу которого подключен
0 одновибратор, а выход модулятора подключен к первому входу фазосмещающего блока, источник переменного напряжения подключен к второму входу фазосмещающего блока и к входу первого формирователя управляющих импульсов, выход кото5 рого подключен -к входу одновибратора и через первый усилитель мощности к первому электромагниту, а выход фазосмещающего блока через последовательно соединенные второй формирователь управляющих импульсов и второй усилитель мощнос0
ти подключен к второму электромагниту.
фиг.Ц
«,
У44Н
«/I
Q
гтТПТ
