1
Изобретение относится к оптическому приборостроению, в частности к приспособлениям для сборки оптических приборов, и может быть использовано для ц Ентрировки линз на операциях центрировки, склейки и центрировки в оправах.
Цель изобретения - расширение класса центрируемых линз и повьшшни производительности.
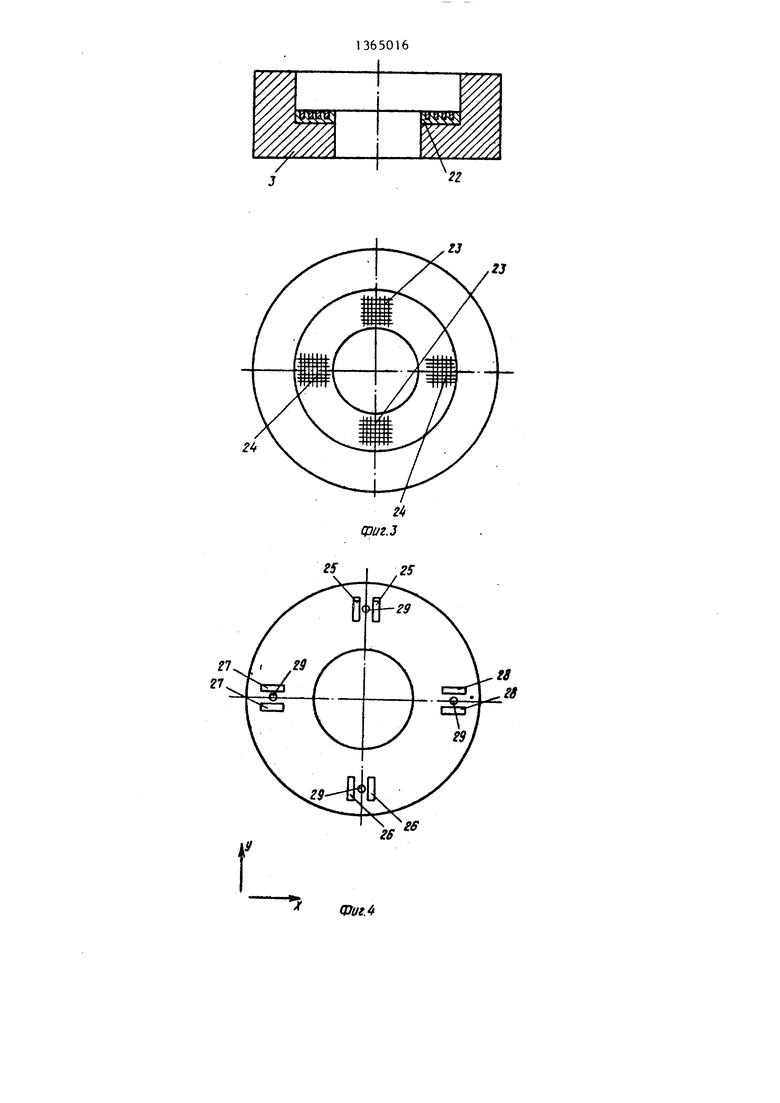
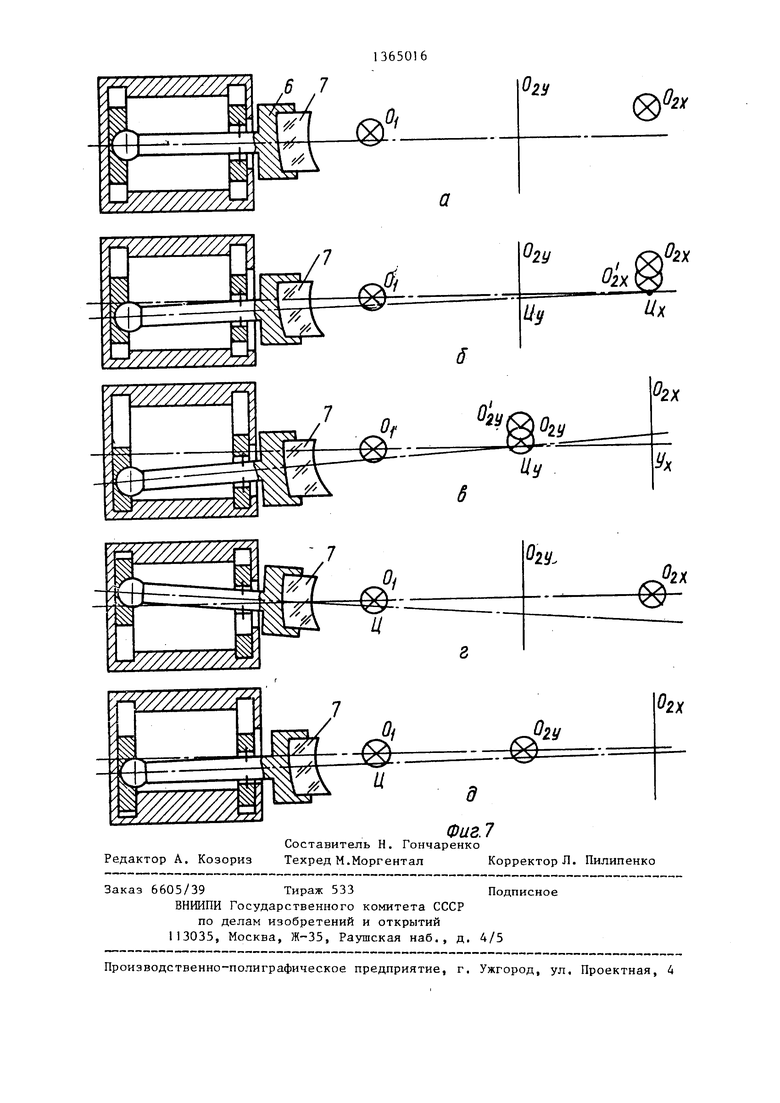
На фиг. 1 изображена конструкция предлагаемого устройства; на фиг. 2 схема, поясняющая работу устройства на фиг. 3 - структурная схема ста- тора линейного шагового двигателя; на фиг. 4 - структурная схема планшайбы с группами магнитов и дросселями (индуктора); на фиг. 5 - питающий дроссель; на фиг. 6 - упрощен- ная схема линейного шагового двигателя; на фиг. 7 - схема процесса центрировки торосферической линзы посредством устройства.
Узел качания (фиг, 1) располага- ется на шпинделе станка и состоит и двух параллельных планшайб 1 и 2, расположенных в корпусе 3, закрытом
крышками 4 и 5, причем крышка 5 имеет хвостовик для присоединения к шпи-нделю станка. В планшайбах 1 и 2 подвешен ориентируюш 1й шток 6 с гнездом для крепления центрируемой линзы 7 в оправе 8. Крепление ориентирующего штока 6 к планшайбе 1 осу ществляется, например, при помощи упругой пластины 9, прикрепленной к планшайбе 1 кольцом 10, а к штоку 6 - кольцом 11, что предотвращает осевой поворот штока 6.(Соединение планшайбы 2 со штоком 6 осуществляется при помощи шарового шарнира 12 Независимое радиальное перемещение планшайб по двум координатам осуществляется, например, при помощи ли- нейных шаговых двигателей, индукто рами которых служат планшайбы 1 и 2, а статорами - поверхности А и Б корпуса 3 и крьш1ки 5 соответственно Индукторы шаговых двигателей через контактные кольца 13 и 14 и щетки 15 и 16 соединяются с блоками 17 управления (приводами, что дает возможность центрировать линзу 7 при вращении шпинделя станка. Электри- ческая схема блока 17 управления приводами выполнена, например, чис- ловой и содержит блоки 18 и 19 управления линейными шаговыми двига
162
телями и электронно-вычислительную машину (ЭВМ) 20, например Электро- ника-60, рассчитывающую величины перемещений планшайб 1 и 2 и вьщаю- щую команды блокам 18 и 19 управле ния линейнык и шаговыми двигателями произвести рассчитанные перемещения.
Величины перемещения планшайбы задаются по формуле
s, H-4.
где S и S - перемещения первой и
второй планщайб; 1 - расстояние между планшайбами;
г - расстояние от первой планшайбы до центра качания.
Устройство работает следующим образом.
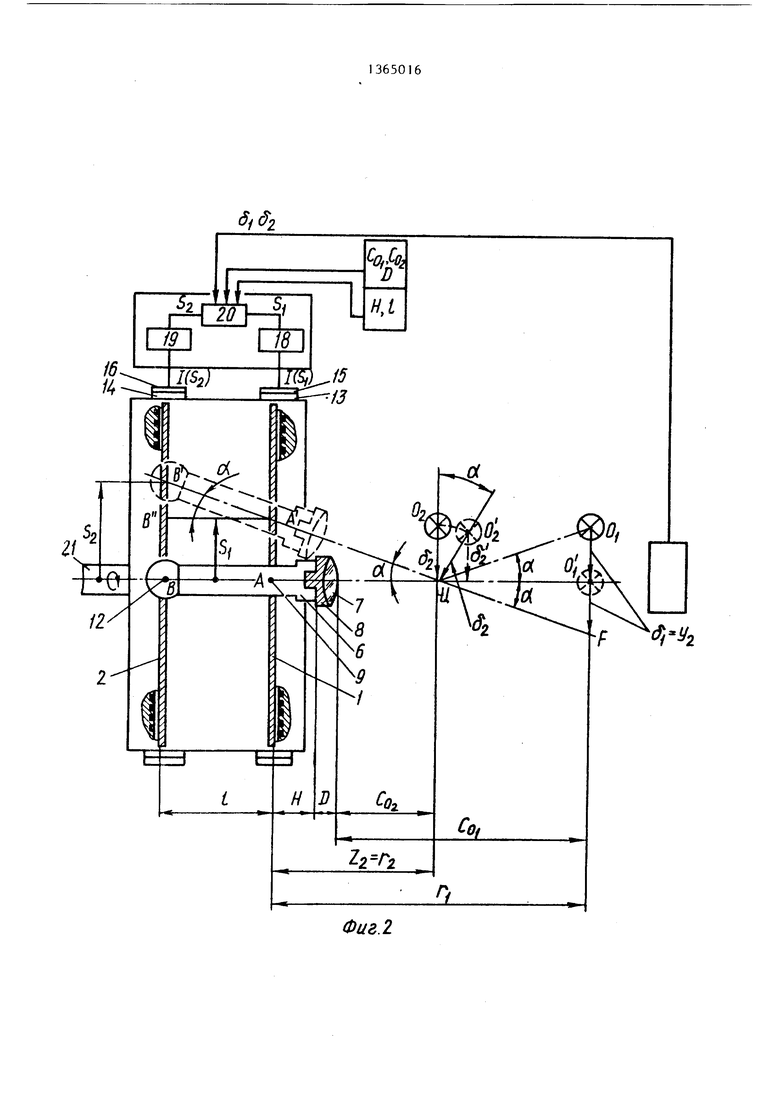
В ЭВМ 20 вводятся конструктивные данные центрируемой линзы 7 (фиг. 2) (удаление автоколлимационных точек 0 и 0 от вершины линзы 7 С, и расстояния от опорного торца оправы 8 до вершины линзы 7D; параметры самого устройства - расстояние Н от опорного торца штока 6 до центра упругой пластины 9 планшайбы 1 и расстояние I между планшайбами 1 и 2 . По этим данным ЭВМ 20 рассчитывает расстояния г и г от автоколлимационных точек Oi и 0 до центра упругой пластины 9 планшайбы 1 и коэффициенты пропорциональности К и К J между перемещениями S,- и планшайб 1 и 2 для автоколлимационных точек 0/( и 0 по формулам
г, Со,+ D + Н; К - Е13:1)П r(3-i)
где i 1, 2 - номер центрируемой автоколлимационной точки.
Далее при помощи автоколлимационной трубки (не показано) определяют величину децентрировки одной из автоколлимадионных точек, например первой d ;(), и вводят ее в ЭВМ 20, которая рассчитывает требуемые величины перемещений S , S, планшайб 1 и 2 по формулам
S .s - Ei3;il Г2 .
1111 V- , - , .- 1-
г, Г(,,| г, Г
s к s,K,s, s,. iiis
7, , „ 1 i r:., r
iLli/ l
Г7+1
i() - iil±
2 r,-r/ r,-r
ЭВМ 20 выдает команду блокам 18 и 19 управления линейными шаговыми двигателями произвести перемещения планшайб на найденные величины. Блоки управления линейными шаговыми двигателями преобразуют сигнал ЭВМ 20 в соответствующее значение электрического тока, который через контактные коль- ца 13 и 1А и щетки 15 и 16 передается на расположенный на вращающемся шпинделе 21 узел качания, после чего планшайбы и 2, выполненные в виде индукторов линейных шаговых двигателей, перемещаются на величины и Sj-. Закрепленные в планшайбах 1 и 2 концы штока 6 также смещаются на величины S . и . Так как в обще случае S,/ , шток 6 заклонится на некоторый угол V()
Sii- S,,
arctg
1
Прл центрировке второй автоколли- мационной точки устройство работает аналогичным образом, величины S и Sjj в этом случае рассчитываются по формулам
W1 .
г,-г,
V с - Hull С
R-;- Ь, -Ь,.
- Л
Так как ЭВМ 20 может рассчитывать значения S, ti любы;х значени г., а линейные шаговые двигатели их осуществлять, предлагаемое устройство не имеет присущей известному мертвой зоны. Ранее рассматривался заклон только в одной плоскости ZY, однако, так как ЭВМ 20 может рассчитать и задать линейным шаговым двигателям перемещения по X и Y с различными К и К,,, возможно производить заклоны в плоскостях X и Y от- носительно различных осей, что позволяет центрировать анаморфотные (цилиндрические, торические и т.д.) линзы. Таким образом, предлагаемое устройство позволяет центрировать любые линзы.
Линейные шаговые двигатели и блоки управления ими работают следующим образом.
0
с 5
0
п
5
0 5 0 5
Поверхности А и Б корпуса 3 и крышки 5 выполнены в виде пластин 22 из ферромагнитного материала. На пластины 22 нанесены две взаимно перпендикулярные системы параллельных канавок 23 и 2А (фиг. 3), заполненных немагнитным составом и образующих систему координат устройства.
Над поверхностями А и Б расположены планшайбы 1 и 2 (фиг. 1). На противоположных сторонах планшайб расположены группы координатных магнитов 25 и 26 (по координате X) и 27 и 28 (по координате Y) (фиг. 4) с фазными обмотками управления и зубцовыми структурами (не показаны), ориентированными ортогонально относительно систем параллельных канавок статора. Каждая координатная зубцовая структура представляет систему параллельных канавок, аналогичных системе параллельных канавок статора, с расстояниями между ними, большими на 1/4 периода, чем на статоре.
В промежутках между магнитами расположены питающие дроссели 29 (фиг. 4 и 5), объединенные общим воздухопроводом и предназначенные для подачи воздуха в зазор L между планшайбами и статорами с целью создания магнитовоздушной подвески. Этот зазор создается и поддерживается постоянным ( 20-30 мкм) благодаря уравновешиванию сил притяжения индуктора к пластине, создаваемых постоянными магнитами, и сил отталкивания, создаваемых сжатым воздухом, подаваемым в зазор через питающие дроссели 29 (фиг. 4 и 5).
Планшайбы 1 и 2 выполняют функции индуктора двухкоординатных линейных шаговых двигателей.
Управление линейным шаговым двигателем, образованным пластинами 22 и планшайбами 1 и 2 с группами магнитов 25 и 26 или 27 и 28 (фиг. 4 и 6), каждый из которых состоит из
постоянного магнита 30, магнитопро- водов 31 и 32 с зубцовыми структурами 33-36 на рабочих поверхностях магнитопроводов и обмоток 37 и 38 управления (фиг. 6а, б, в, г), осуществляется путем коммутации тока в обмотках управления. Так, при возбуждении обмотки 37 управления магнитный поток постоянного магнита замыкается на, зубец 34. Последний устанавливается против зубца пластины 22 (фиг. 6а). При возбуждении обмотки 38 и отключении обмотки 37 магнитный поток переключается на зубец 35 и индуктор перемещается вправо (фиг. б б). При изменении направления тока в обмотке 37 и отключении обмотки 38 магнитный поток переключается на зубец 33 и индуктор снова перемещается на 1/4 периода вправо (фиг. 6в). Далее изменяется направление тока в обмотке 38 и отключается ток в обмотке 37 (фиг. 6г) Затем коммутация обмотки управления повторяется в том же порядке, обеспечивая движение индуктора над пластиной 22 вправо.
Для перемещения индуктора влево изменяется порядок коммутации обмоток управления. Для повышения точности позиционирования применяется квантование тока в обмотках управления, при этом используется синусоидальный закон изменения тока.
Процесс центрировки линз (фиг. 7) с помощью устройства осуществляется следующим образом. Закрепив центрируемую линзу 7, например торосфери- ческую, в ориентирующем штоке 6, совмещают оси качания устройства Ц и Ц с автоколлимационными линиями 0 и О 2 одной из поверхностей (торической) линзы 7 в осевом направлении (фиг. 7а). Перестройка предлагаемого устройства для совмещения осей производится изменением алгоритма работы ЭВМ,.поэтому на ориентации линзы 7 в отличие от известного не отражается. Затем закло- ном вокруг оси Ц (0,2х)(Фиг. 76) в плоскости X и Ц(0.2,|) в плоскости Y (фиг. 7в), центрируют автоколлимационную точку О, с tpeбyeмoй точностью. При этом децентрировка линий 0 и 02ч, не изменяется, как это было бы при центрировке точки 0 посредством традиционного смещения в
радиальном направлении (точки 0 и 0„ ), при котором децентрировки увеличиваются (О ) или уменьшаются (0-2) на величину децентрировки точки О, случайным образом.
После этого совмещают оси качания Дх и Ц с автоколлимационной точкой О, сферической поверхности линзы 7 (фиг. 7г, д). При этом ориентация штока 6 не изменяется в отличие от известного устройства, в котором перестройка центра качания сопряжена с изменением ориентации штока. Далее
заклоном вокруг точки 0 в плоскости X (фиг. 7г) центрируют автоколлимационную линию (фиг. 7д) и в плоскости Y автоколлимационную линию 0„ Так как точка 0 совмещена с осями
Цу и Ц,, ее децентрировки не происходит. После этого проводят технологическую обработку линзы 7.
Формула изобретения
1.Устройство для центрировки линз, содержащее корпус с двумя цилиндрическими проточками, в каждой из которых размещена планшайба с
возможностью перемещения в радиальном направлении и с шарнирно закрепленным в одной из планшайб штоком, отличающееся тем, что, с целью расширения класса центрируемых линз и повышения производительности, каждая из планшайб снабжена электромеханическим приводом с независимым перемещением по двум координатам, подключенным к блоку управт
ления приводами, а шток установлен на другой планшайбе через упругую пластину.
2.Устройство по п. 1, отличающееся тем, что планшайбы
выполнены в виде роторов линейных шаговых двигателей, статоры которых размещены в корпусе.
У 
| название | год | авторы | номер документа |
|---|---|---|---|
| Патрон для центрировки линз | 1986 |
|
SU1363113A1 |
| Патрон для центрировки линз | 1985 |
|
SU1282042A1 |
| Способ центрирования линз | 1990 |
|
SU1755086A1 |
| Патрон для центрировки линз | 1985 |
|
SU1315922A1 |
| Способ соединения линз в оптический блок и устройство для его осуществления | 1987 |
|
SU1597829A1 |
| Патрон для центрирования линз | 1983 |
|
SU1149201A1 |
| АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2019 |
|
RU2705177C1 |
| Устройство для центрирования линз | 1986 |
|
SU1455235A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЦЕНТРИРОВКИ И СКЛЕЙКИ ЛИНЗ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078359C1 |
| Способ центрировки линз | 1986 |
|
SU1381356A1 |

Изобретение относится к приспособлениям для сборки оптических приборов. Цель изобретения - расширение класса центрируемых линз и повышение производительности, В планшайбах 1 и 2 подвешен ориентирующий 7 3 А 1 9 rz шток 6 с гнездом для крепления центрируемой линзы 7 в оправе 8. Независимое радиальное перемещение планшайб 1 и 2 по двум координатам осуществляется при помощи линейных шаговых двигателей, индукторами которых служат планшайбы 1 и 2, а статорами - поверхности А и Б корпуса 3 и крьпики 5 соответственно. Индукторы шаговых двигателей через кольца I3 и 14 и щетки 15 и 16 соединяются с блоком 17 управления приводом, что дает возможность центрировать линзу 7 при вращении шпинделя станка. Величины перемещения планшайбы задаются по.определенной форме. I з.п. ф-лы, 7 ил. Ф (Л /7 19 О5 JUIB фиг.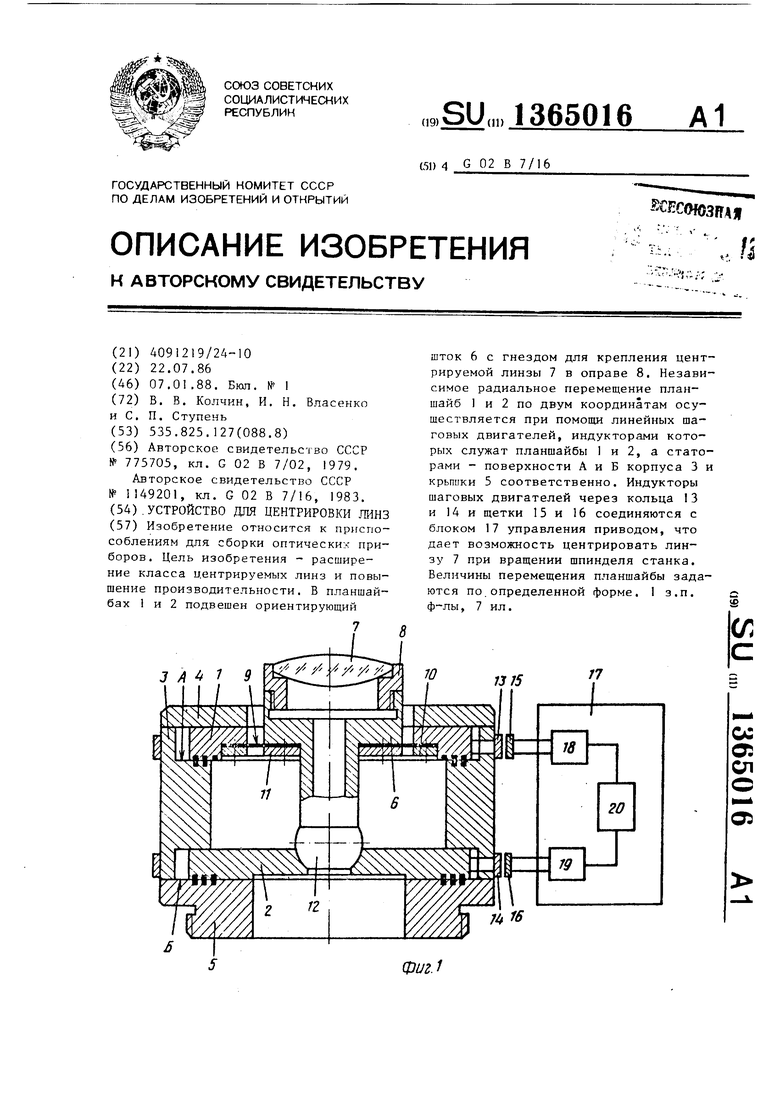
Фиг.2
f«
Фиг А
21
гз
гз
П
Фиг. 7
Составитель Н. Гончаренко Редактор А. Козориз Техред М.Моргентал Корректор Л. Пилипенко
Заказ 6605/39 Тираж 533Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
02У
02,
| Способ центрировки цилиндрических линз в оправах | 1979 |
|
SU775705A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
