Изобретение относится к области электротехники и может быть применено, в частности, для защиты электродвигателей постоянного тока еле- дящих систем.
Цель изобретения - повьшение надежности путем обеспечения непрерывности контроля теплового состояния двигателя и повышение точности,
На фиг.1 представлен график получения последовательности импульсов, которую используют в качестве сигнала, пропордионального квадрату тока; на фиг.2 - процессы изменения температуры перегрева Г (t) (пропор- диональной результату фильтрадии) при нагружении двигателя номинальным током i, и током 1ц 1,5, на фиг.З - схема устройства, реализу- ющего предлагаемый способ.
Предлагаемый способ заключается в том, что непрерывно измеряют ток защищаемого двигателя, формируют сигнал, пропорциональный абсолютной величине тока, сравнивают его с од- нополярным, периодически обращающимся в нуль опорньм сигналом треугольной формы, прерывают его на те промежутки времени, когда опорный сигна больше, чем измеряемьй ток. Текущий результат усредененйя полученной последовательности импульса сравнива- ют с уставкой и формируют сигнал прерьшания,в случае превьшения над верхним уровнем уставки или последующего . включения сигнала управления за- пдащаемого двигателя в случае снижения результата усреднения ниже уровня уставки, при этом верхний уровень уставки определяют по установившемуся значению результата усреднения при номинальном токе двигателя, а постоянную времени усреднения, осуще ствляемрго путем апериодической фильтрации, определяют по формуле
tK
-ln(l- f,-)
(1)
где tj, - максимально допустимый . интервал длительности работы при токе IK IH .
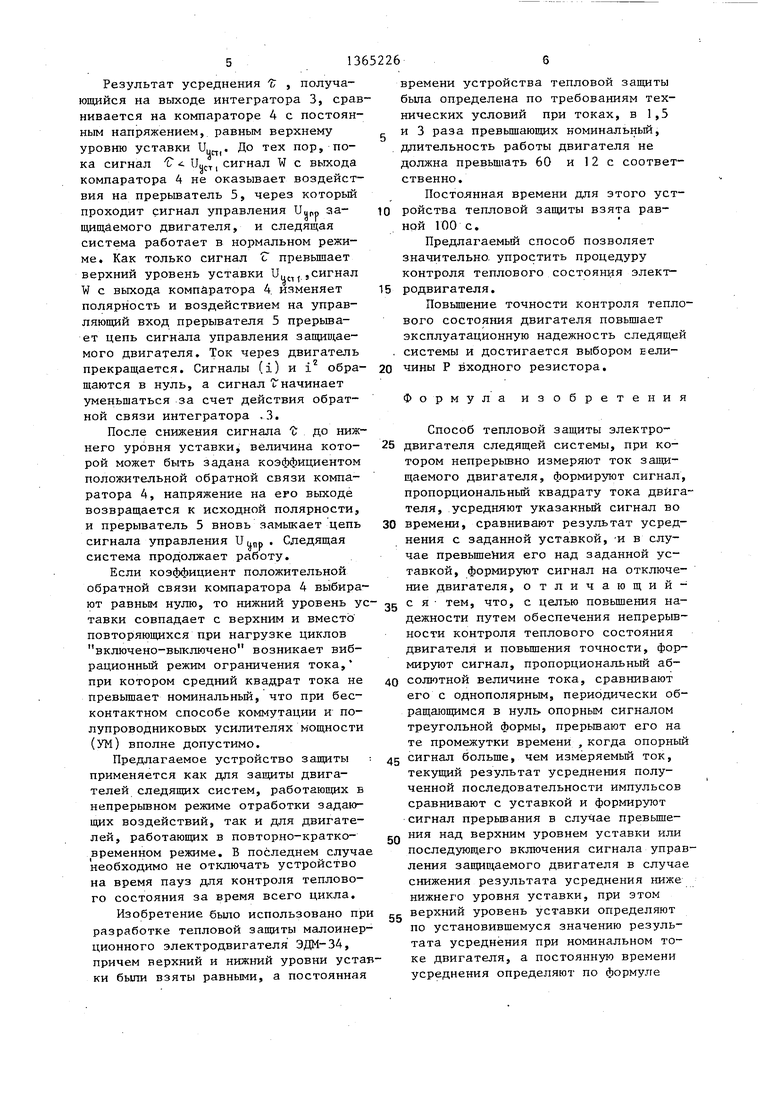
Как видно из фиг.2, сигнал, пропорциональный абсолютной величине, т.е. модулю тока защищаемого двигателя, сравнивают с периодическим об- ращаюг ц мся в нуль однополярным опорным сигналом Ugn треугольной формы и
прерывают на те промежутки времени, когда опорный сигнал больше, получаемые таким образом импульсы (на фиг,2 заштрихованы) образуют последовательность, которую и используют в качестве сигнала, пропорционального квадрату тока. Очевидно, что длительность импульсов образованной последовательности при постоянном во - времени модуле тока строго пропорциональна их амплитуде, а значит площадь импульсов строго пропорциональна квадрату тока. Если ток и его модуль изменяются во времени, то эта строгость нарушается, однако возникающей ошибкой можно пренебречь, имея в виду, что период опорного сигнала легко сделать на один - три порядка меньше минимального времени интервала (например 3-10 с), за кото- рьй считают необходимым измерять тепловое воздействие тока. I
Так как интеграл во времени от
сигнала К, 1, пропорциональный квадрату тока, соответствует только количеству тепла QK, нагревающего двигатель, а количество тепла Qp, рассеивающегося и отводимого, можно учесть по интегралу от сигнала , пропорционального температуре Т перегрева двигателя над окружающей средой, тогда сама температура Т величина, пропорциональная разности QH - QP значит, сГ как результат усреднения последовательности импульсов можно найти путем апериодической
фильтрадии t
J (K;i - )dt.
(2)
так как преобразование (2) при К, ---, К2 соответствует дифференциальному уравнению апериодического фильтра
,(3)
К i Т + ТоО
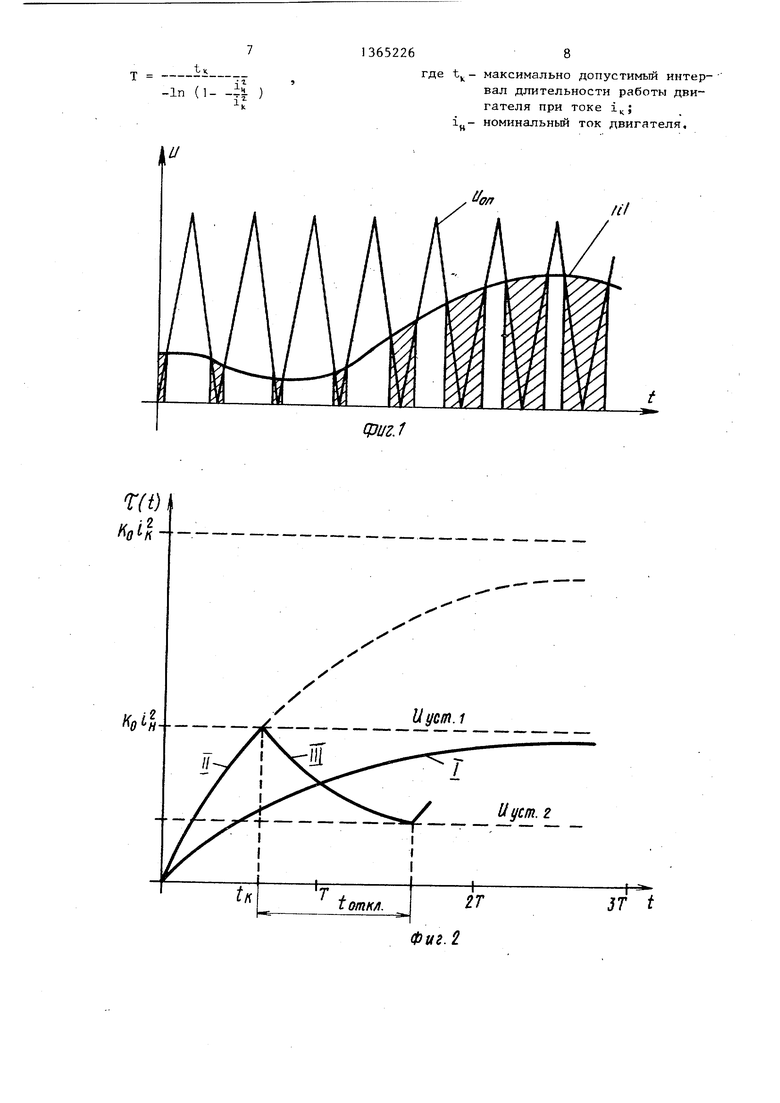
Если до начала процесса Т (0)0 (температура двигателя равна температуре окружающей среды), а затем двигатель нагружают номинальным током 1ц, то процесс изменения 6 соответствует изображенной на фиг,2 кривой 1 ,,
(t) (1-ё ) ,
(А)
Установившееся максимальное значение с принимают за величины верхнего уровня уставки U, , KoiJ, - При этом очевидно, что если рабочий ток хотя бы на 1% меньше номинального тока, то с (t никогда не достигнет уровня уставки и срабатывания никогда не нроизойдет, что соответствует допустимости длительной работы двигателя при токе меньшем номинального. Если теперь, начиная от Г(0)0, нагрузить двигатель током 1.1ц, то процесс изменения Г пойдет, как указано на фиг.2, кривой II
t
T(t) К„1 (1-е ),
(5)
которая достигнет уровня уставки Uijj. в момент t|, определяемый уравнением
Ь
и,,.,, к„1и кУ, (1-ё )о (6)
.ICT.I
-н
Поэтому, если известно допустимое t|4 работы двигателя с током 1, то постоянную времени Т определяют из уравнения (6), т.е. по формуле (l). Таким образом, если достигнет верхнего уровня уставки UUCT.O двигатель отключится, что можно осуществить прерыванием сигнала управления, то начнется уменьшение С по закону разряда апериодического фильтра (кривая III на фиг.2). t
(t) и е
(7)
что соответствует процессу остывания двигателя. По истечении промежутка времени, определяемого по фор муле
t - Т In %гкл Т in - (8)
t достигнет нижнего уровня Uucyi, и двигатель вновь включают замыканием цепи сигнала управления защищаемого двигателя. Если задано время t пребывания двигателя в отключенном состоянии, то нижний уровень уставки определяют по формуле
откл
.Далее процесс повторяется.
В случае, когда необходимо продолжить управление двигателем в условиях перегрузки, но без превышени допустимого перегрева i,- ,5
нижний уровень уставки IL,,,,выбирают
3
365226. 4
равным верхнему U, , При этом после первого отключения на перегрз зке возникает вибрационный режим ограни- с чения тока, причем средний квадрат его не превысит номинального.
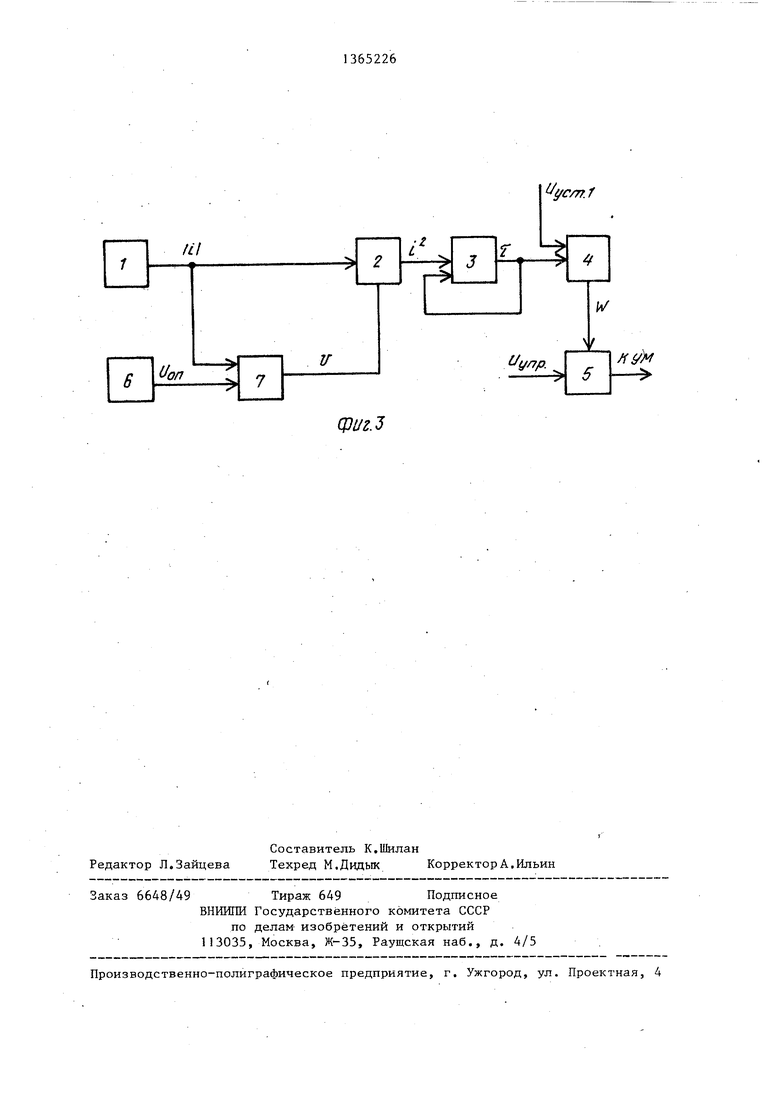
Датчик 1 абсолютной величины тока двигателя через первый прерыватель 2 соединен с входом инвертирующего интегратора 3, другой вход которого соединен с его выходом. Выход этого интегратора в свою очередь соединен с входом первого компаратора 4, другой вход которогосоединен с ис точником постоянного напряжения
10
15
Выход этого компаратора соединен с сигнальным входом второго прерывателя 5 включен в цепь сигнгша U
20
который 1 пруправле25
30
40
ния заидищаемого двигателя. Кроме того, генератор 6 опорного сигнала и датчик 1 абсолютной величины тока подключены к входам второго компаратора 7, выход которого подключен к управляющему входу первого прерывателя 2.
Устройство работает следующим образом.
Сигнал (i) с выхода датчика 1 абсолютной величины тока и опорный сигнал Ugn с выхода генератора 6 сравнивается на компараторе 7, на выходе которого образуетс-я напряжение U прямоугольной формы, постоянной амп2g литуды и переменной скважности, причем длительность импульсов, например, положительной полярности пропорциональна сигналу (1). Напряжение и поступает на управляющий вход прерьгоателя 2 и импульсами (в данном случае) отрицательной полярности прерьшает сигнал (ij, который проходит через прерыватель только при положительной полярности напряже.g ння и. Таким образом, на выходе пре- рьшателя 2 получам последовательность импульсов 1
амплитуда и длительность которых практически пропциональна (i). Этот процесс описан gQ графически представлен на фиг.2,
J ч Последовательность импульсов i
поступает на вход инвертирующего интегратора 3, который, будучи охвачен резисторной обратной связью
55
через входной резистор второго входа, представляет собой апериодический фильтр, усредняющий последовательность 1.
Результат усреднения tr , получающийся на выходе интегратора 3, сравнивается на компараторе 4 с постоянным напряжением, равным верхнему уровню уставки U,,,. До тех пор, пока сигнал С UucTi сигнал W с выхода компаратора 4 не оказывает воздействия на прерьшатель 5, через который проходит сигнал управления за- щищйемого двигателя, и следящая система работает в нормальном режиме. Как только сигнал Г превьппает верхний уровень уставки 1),,,сигнал Vf с выхода компаратора 4. изменяет полярность и воздействием на управляющий вход прерывателя 5 прерьша- ет цепь сигнала управления защищаемого двигателя. Ток через двигатель прекращается. Сигналы (i) и i обращаются в нуль, а сигнал t начинает уменьшаться за счет действия обратной связи интегратора ,3.
После снижения сигнала t до нижнего уровня уставкиj величина которой может быть задана коэффициентом положительной обратной связи компаратора 4, напряжение на его выходе возвращается к исходной полярности, и прерыватель 5 вновь замыкает цепь сигнала управления U ппр . Следящая система продолжает работу.
Если коэффициент положительной обратной связи компаратора 4 выбирают равным нулю, то нижний уровень утавки совпадает с верхним и вместо повторяющихся при нагрузке циклов включено-выключено возникает вибрационный режим ограничения тока, при котором средний квадрат тока не превышает номинальньй, что при бесконтактном способе коммутации и полупроводниковых усилителях мощности (УМ) в полне допус тимо.
Предлагаемое устройство защиты применяется как для защиты двигателей следящих систем, работающих в непрерывном режиме отработки задаю щих воздействий, так и для двигателей, работающих в повторно-кратковременном режиме. В последнем случа необходимо не отключать устройство на время пауз для контроля теплового состояния за время всего цикла.
Изобретение было использовано пр разработке тепловой защиты малоинерционного электродвигателя ЭДМ-34, причем верхний и нижний уровни устаки были взяты равными, а постоянная
времени устройства тепловой защиты была определена по требованиям технических условий при токах, в 1,5 и 3 раза превьшающих номинальный, длительность работы двигателя не должна превьш1ать 60 и 12 с соответственно.
Постоянная времени для этого уст- ройства тепловой защиты взята равной 100 с.
Предлагаемый способ позволяет значительно, упростить процедуру контроля теплового состояния элект- родвигателя.
Повыщение точности контроля теплового состояния двигателя повышает эксплуатационную надежность следящей системы и достигается выбором вели- чины Р входного резистора.
Формула изобретения
Способ тепловой защиты электродвигателя следящей системы, при котором непрерьшно измеряют ток защищаемого двигателя, формируют сигнал, пропорциональный квадрату тока двигателя, усредняют указанный сигнал во
времени, сравнивают результат усреднения с заданной уставкой, И в случае превьшеНия его над заданной уставкой, формируют сигнал на отключение двигателя, отличающийс я тем, что, с целью повьшения надежности путем обеспечения непрерывности контроля теплового состояния двигателя и повьшения точности, формируют сигнал, пропорциональный абсолютной величине тока, сравнивают его с однополярным, периодически обращающимся в нуль опорным сигналом треугольной формы, прерьшают его на те промежутки времени , когда опорный
сигнал больше, чем измеряемьм ток, текущий результат усреднения полученной последовательности импульсов сравнивают с уставкой и формируют сигнал прерьшания в случае превьшения над верхним уровнем уставки или последующего включения сигнала управления защищаемого двигателя в случае снижения результата усреднения ниже нижнего уровня уставки, при этом
верхний уровень уставки определяют по установившемуся значению результата усреднения при номинальном токе двигателя, а постоянную времени усреднения определяют по формуле
ft
фцг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство тепловой защиты электродвигателя следящей системы | 1989 |
|
SU1601685A2 |
| Устройство для токовой защиты электрических машин | 1985 |
|
SU1267521A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU714566A1 |
| Способ тепловой защиты электродвигателя следящей системы | 1978 |
|
SU790064A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2057931C1 |
| Устройство для защиты электрического двигателя от перегрузки и сверхтоков | 1987 |
|
SU1398016A1 |
| Устройство для защиты электродвигателя от перегрузки | 1984 |
|
SU1233242A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2066757C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕЙСТВУЮЩЕГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2298194C1 |
| Устройство для защиты обмоток генератора от тепловых повреждений | 1983 |
|
SU1163410A1 |
Изобретение относится к электротехнике и может быть применено, в частности, для заптиты электродвигателей постоянного тока следящих систем. Целью изобретения является повьшение надежности путем обеспечения непрерывного контроля теплово- го состояния двигателя и повышение точности. Результат апериод ического . усреднения квадрата тока, отражающий тепловое состояние двигателя, сравнивается с верхним уровнем уставки и формируется сигнал на отключение сигнала управления защищаемого двигателя. При последующем снижении температуры двигателя до уровня нижней уставки производится повторное автоматическое включение сигнала управления. При необходимости сохранения управления двигателем в режимах перегрузки возможен вибрационный режим. 3 ил. (Л
ЗТ t
Фаг. 2
ориг.
| СТРОИТЕЛЬНЫЙ БЛОК | 1999 |
|
RU2162500C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ тепловой защиты электродвигателя следящей системы | 1978 |
|
SU790064A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
