(21)4110031/25-11
(22)02.06.86
(46) 30.01.88. Кюл. № 4
(71)Новосибирский филиал Всесоюзного института по проектированию организаций энергетического строительства Оргэнергострой
(72)А.Г.Кротов, В.И.Мандриков и Ю.М.Балабаев
(53)621.873(088.8)
(56)Авторское свидетельство СССР
№ 887441, кл. В 66 С 23/42, 01.11.79.
(54)САМОХОДНЫЙ ГРУЗОПОДЪЕМНЫЙ КРАН
(57)Изобретение относится к подъемно- транспортному машиностроению. Цель изобретения - повышение транспортабельности и устойчивости при работе. Кран содержит платформу, опираю цуюся на раму гусеничной тележки 12 и соединенную с тягачом 3, телескопическую стрелу 7, основание которой установлено на каретке 15, размещенной в расположенных вдоль платформы направляющих, при этом платформа выполнена из двух жестко соединенных между собой и расположенных на разных уровнях площадок. На нижней площадке 2 смонтированы упомянутые направляющие. Верхняя площадка 1 соединена с тягачом щаровым шарниром 4, нижняя площадка 2 при помощи осевых шарниров 8 и расположенных по обе стороны домкратов оперта на опорно-поворотное устройство, которое установлено на раме гусеничной тележки. При приведении в действие аутригеров платформа поднимается до тех пор, пока тягач 3 частично не отрывается от грунта, выполняя роль противовеса. 3 ил.
с с
ел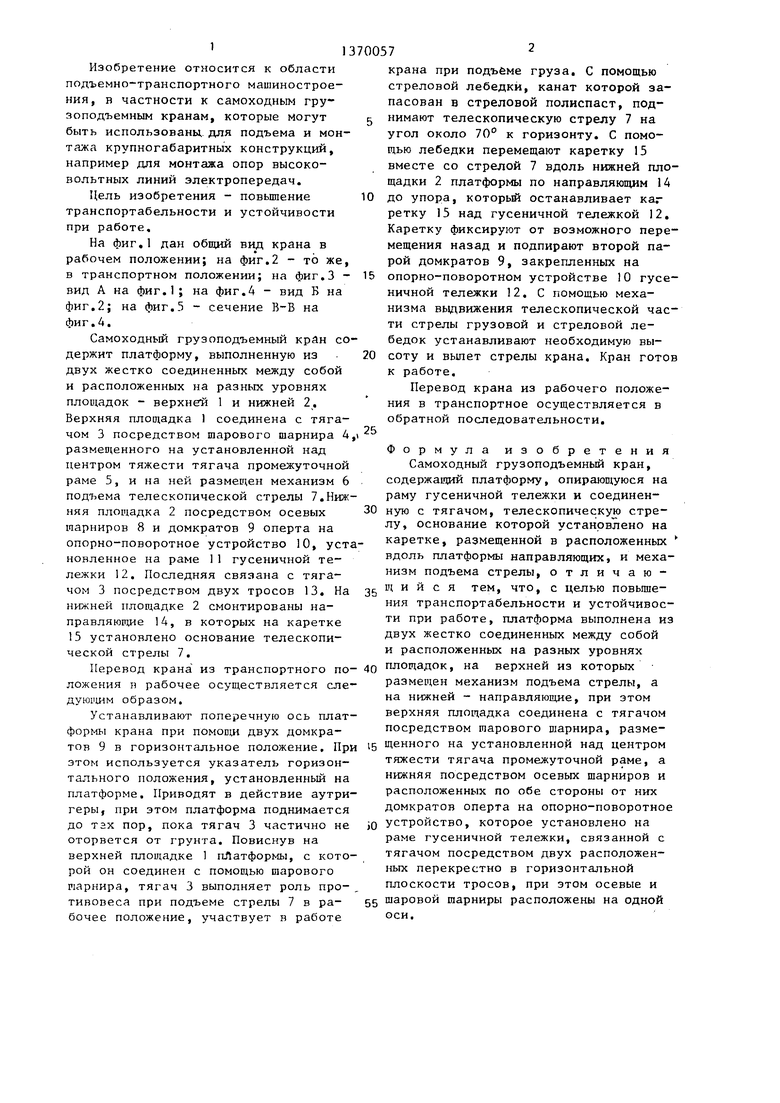
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ работы стрелового самоходного крана и устройство для его осуществления | 2019 |
|
RU2730730C1 |
| ПУТЕУКЛАДЧИК ТРАКТОРНЫЙ | 2023 |
|
RU2808047C1 |
| Самоходный грузоподъемный кран | 1990 |
|
SU1776630A1 |
| Способ подготовки твердотопливной ракеты космического назначения для запуска космического аппарата и наземный стартовый подвижный ракетно-космический комплекс для его осуществления, способ сборки головного блока и комплект транспортно-технологического оборудования для его осуществления | 2023 |
|
RU2813395C1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЗАМЕНЫ ЭКИПАЖНЫХ ТЕЛЕЖЕК ПАССАЖИРСКИХ ВАГОНОВ НА ПРИЕМООТПРАВОЧНЫХ ПУТЯХ СТАНЦИЙ | 1997 |
|
RU2130397C1 |
| Башенный кран | 1984 |
|
SU1248942A1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
| ПУТЕУКЛАДЧИК | 1999 |
|
RU2140478C1 |
| Стреловой рельсовый кран | 1972 |
|
SU449002A1 |
| Кран-трубоукладчик | 2017 |
|
RU2676998C1 |

12
:о
1
Изобретение относится к области подъемно-транспортного машиностроения, в частности к самоходным грузоподъемным кранам, которые могут быть использованы,- для подъема и мотажа крупногабаритных конструкций, например для монтажа опор высоковольтных линий электропередач.
Цель изобретения - повьшение транспортабельности и устойчивости при работе.
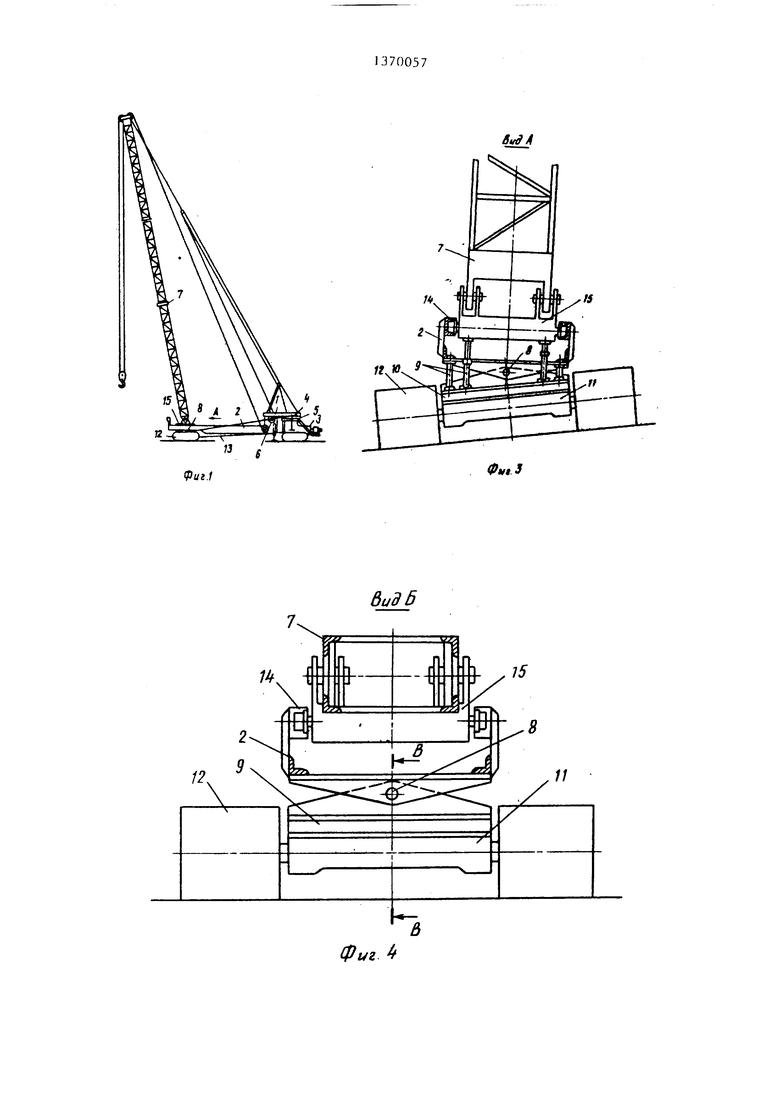
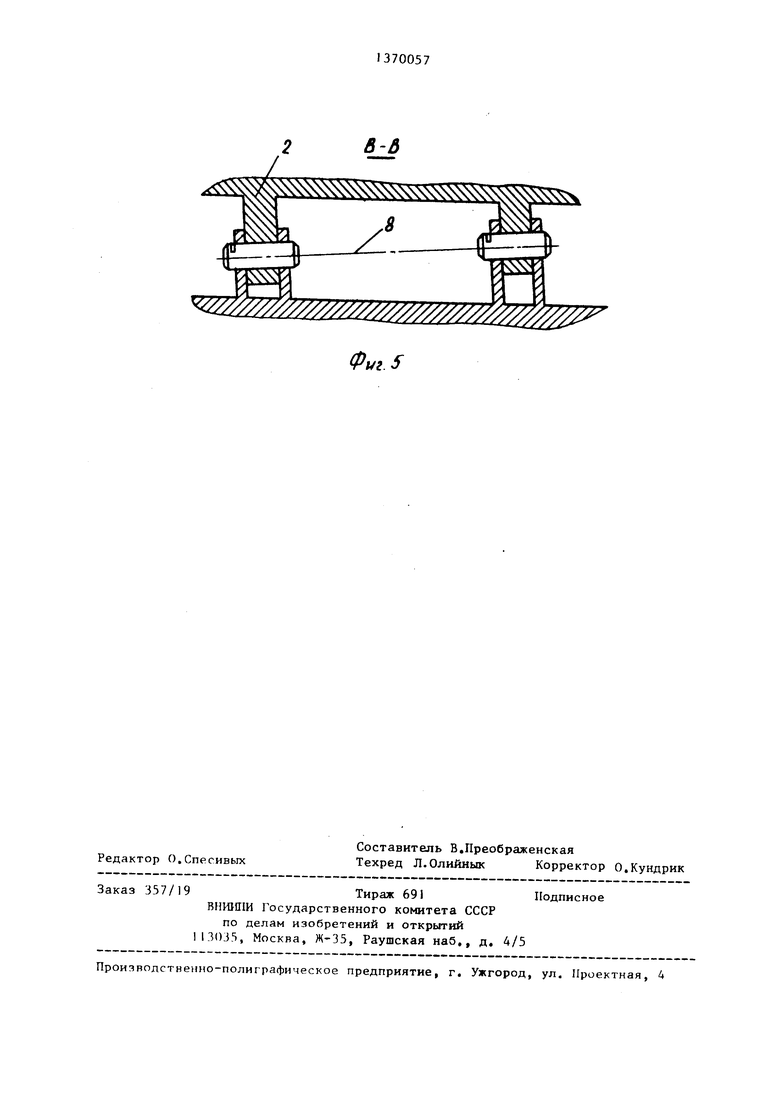
На фиг,1 дан общий вид крана в рабочем положении; на фиг.2 - то ж в транспортном положении; на фиг.З вид А на фиг.1; на фиг.А - вид Б н фиг.2; на фиг.З - сечение В-Б на фиг.4.
Самоходный грузоподъемный крин
держит платформу, выполненную из двух жестко соединенных между собой и расположенных на разных уровнях площадок - верхнегй 1 и нижней 2.
Верхняя площадка 1 соединена с тяга1/ 25
чом J посредством шарового шарнира a,i
размещенного на установленной над центром тяжести тягача промежуточной раме 5, и на ней размещен механизм 6 подъема телескопической стрелы 7.Нижняя площадка 2 посредством осевых щарниров 8 и домкратов 9 оперта на опорно-поворотное устройство 10, установленное на раме 11 гусеничной тележки 12. Последняя связана с тягачом 3 посредством двух тросов 13. На нижней площадке 2 смонтированы направляющие 14, в которых на каретке 15 установлено основание телескопической стрелы 7.
крана при подъеме груза. С помощью стреловой лебедки, канат которой за- пасован в стреловой полиспаст, под- 5 нимают телескопическую стрелу 7 на угол около 70° к горизонту. С помощью лебедки перемещают каретку 15 вместе со стрелой 7 вдоль нижней площадки 2 платформы по направляющим 14 до упора, которьй останавливает каг ретку 15 над гусеничной тележкой 12. Каретку фиксируют от возможного перемещения назад и подпирают второй парой домкратов 9, закрепленных на опорно-поворотном устройстве 10 гусеничной тележки 12. С помощью механизма выдвижения телескопической части стрелы грузовой и стреловой лебедок устанавливают необходимую высоту и вьшет стрелы крана. Кран готов к работе.
Перевод крана из рабочего положения в транспортное осуществляется в обратной последовательности.
20
Формула изобретения
Самоходный грузоподъемный кран, содержащий платформу, опирающуюся на раму гусеничной тележки и соединен- 30 ную с тягачом, телескопическую стрелу, основание которой установлено на каретке, размещенной в расположенных вдоль платформы направляющих, и механизм подъема стрелы, отличающийся тем, что, с целью повышения транспортабельности и устойчивости при работе, платформа выполнена из двух жестко соединенных между собой и расположенньк на разных уровнях
35
Перевод крана из транспортного по- 40 площадок, на верхней из которых ложения н рабочее осуществляется еле- размещен механизм подъема стрелы, а дуюишм образом.
Устанавливают поперечную ось платформы крана при помопщ двух домкрана нижней - направляющие, при этом верхняя площадка соединена с тягачом посредством шарового шарнира, разметов 9 в горизонтальное положение. При 15 Щенного на установленной над центром этом используется указатель горизон- тяжести тягача промежуточной раме, а тального положения, установленный на платформе. Приводят в действие аутригеры, при этом платформа поднимается
нижняя посредством осевых щарниров и расположенных по обе стороны от них домкратов оперта на опорно-поворотное
до тэх пор, пока тягач 3 частично не Ю устройство, которое установлено на оторвется от грунта. Повиснув на Раме гусеничной тележки, связанной с
тягачом посредством двух расположенных перекрестно в горизонтальной плоскости тросов, при этом осевые и 55 шаровой шарниры расположены на одной
верхней площадке 1 пЛатформы, с которой он соединен с помощью шарового шарнира, тягач 3 выполняет роль про- , тивовеса при подъеме стрелы 7 в рабочее положение, участвует в работе
крана при подъеме груза. С помощью стреловой лебедки, канат которой за- пасован в стреловой полиспаст, под- нимают телескопическую стрелу 7 на угол около 70° к горизонту. С помощью лебедки перемещают каретку 15 вместе со стрелой 7 вдоль нижней площадки 2 платформы по направляющим 14 до упора, которьй останавливает каг ретку 15 над гусеничной тележкой 12. Каретку фиксируют от возможного перемещения назад и подпирают второй парой домкратов 9, закрепленных на опорно-поворотном устройстве 10 гусеничной тележки 12. С помощью механизма выдвижения телескопической части стрелы грузовой и стреловой лебедок устанавливают необходимую высоту и вьшет стрелы крана. Кран готов к работе.
Перевод крана из рабочего положения в транспортное осуществляется в обратной последовательности.
Формула изобретения
Самоходный грузоподъемный кран, содержащий платформу, опирающуюся на раму гусеничной тележки и соединен- 0 ную с тягачом, телескопическую стрелу, основание которой установлено на каретке, размещенной в расположенных вдоль платформы направляющих, и механизм подъема стрелы, отличающийся тем, что, с целью повышения транспортабельности и устойчивости при работе, платформа выполнена из двух жестко соединенных между собой и расположенньк на разных уровнях
5
оси.
Фиг.1
12
Фиг
0ui3
6u35
I .15
В-б
В-б
/
Фуг.
