лены трубчатые захваты, непосредственно охватывающие с возможностью продольного перемещения и с зазором, необходимым для опускания одной из рам относительно другой, цилиндрические направляющие 9. По другой боковой стороне каждого ПН 10 закреплены трубчатые захваты, охватывающие трубчатые захваты соседних ПН 10. Боковые элементы, на которых расположены В 6, выполнены в виде телескопических опор 5. 2 з.п. ф-лы. 7 ил.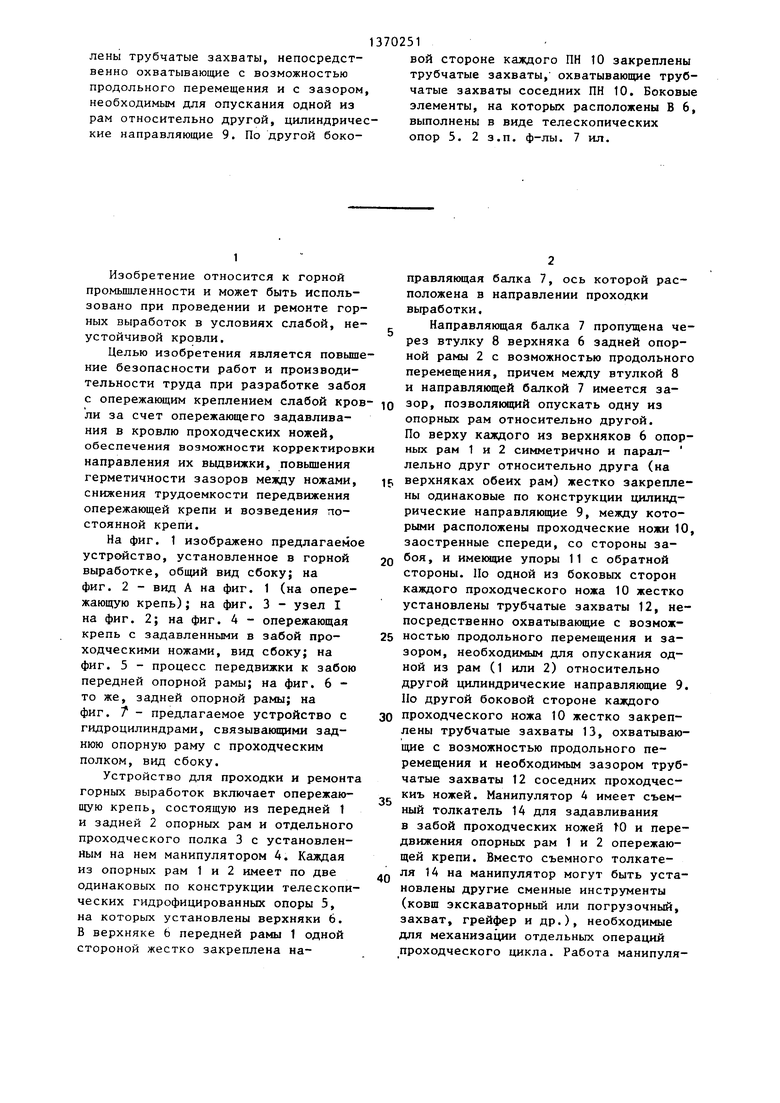
| название | год | авторы | номер документа |
|---|---|---|---|
| Проходческая крепь | 1988 |
|
SU1606707A1 |
| Очистной комплекс совмещенной выемки | 1988 |
|
SU1726781A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1991 |
|
RU2042825C1 |
| Механизированная проходческая крепь | 1988 |
|
SU1599557A1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2184846C2 |
| СТРУГОВЫЙ КОМПЛЕКС, СЕКЦИЯ КРЕПИ, УСТАНОВКА СТРУГОВАЯ, БАЗА СТРУГОВАЯ, ПРИВОД СТРУГА, ПЕРЕГРУЖАТЕЛЬ УКОРОЧЕННЫЙ, КРЕПЬ СОПРЯЖЕНИЯ, МАНИПУЛЯТОР ПЕРЕДВИЖНОЙ | 1999 |
|
RU2163970C1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1992 |
|
RU2026982C1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 1990 |
|
RU2006584C1 |
| Механизированная крепь | 1972 |
|
SU486135A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
Изобретение относится к горной промьшшенности и м.б. использовано при проведении и ремонте горных выра боток в условиях слабой, неустойчивой кровли. Цель изобретения - повышение безопасности работ и производительности труда при разработке забоя с опережающим креплением слабой кровли. Для этого в верхняке (В) 6 передней рамы одной стороной жестко закреплена направляющая балка (НБ) 7 ось которой расположена в направлении проходки выработки. С возможностью продольного перемещения НБ 7 пропущена через втулку Вб задней опорной рамы. Сверху каждого из Б 6 опорных рам симметрично и параллельно одна относительно другой жестко закреплены цилиндрические направляющие 9 Между ними расположены проходческие ножи (ПН) 10 с возможностью их поочередного взаимодействия с приводом опережающей крепи. По одной из боковых сторон каждого ПН 10 жестко установ(/) //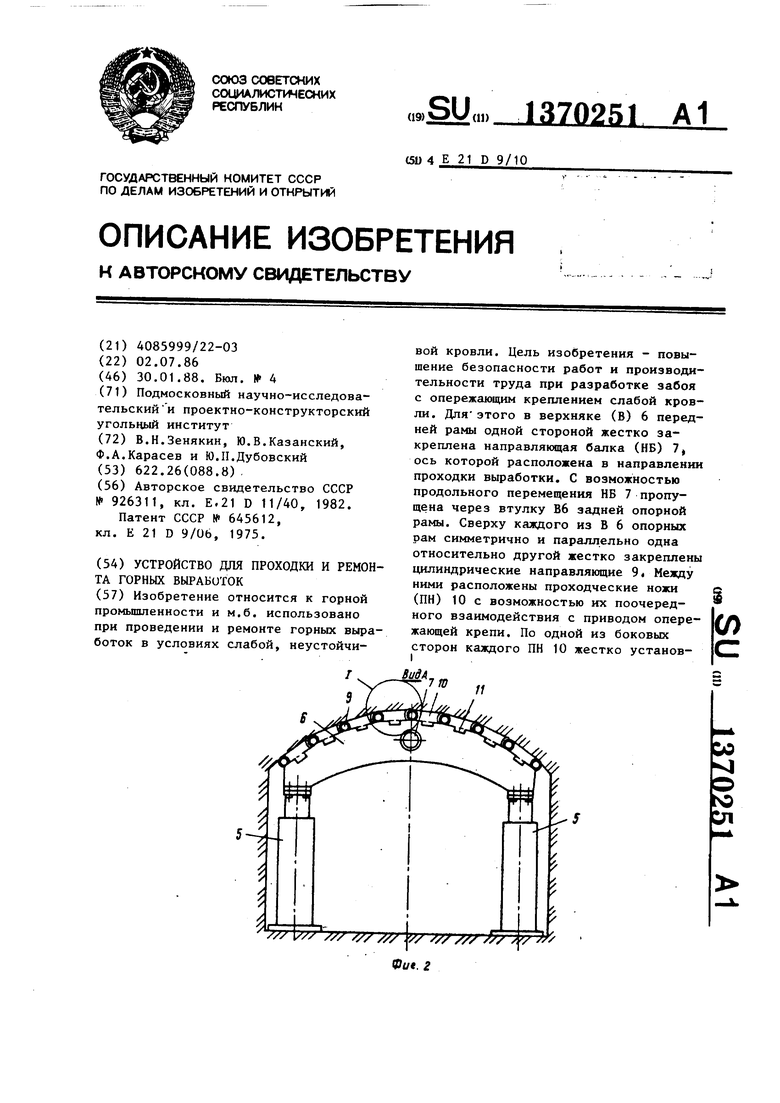
1
Изобретение относится к горной промышленности и может быть использовано при проведении и ремонте горных выработок в условиях слабой, неустойчивой кровли.
Целью изобретения является повышение безопасности работ и производительности труда при разработке забоя с опережающим креплением слабой кров ли за счет опережающего задавлива- ния в кровлю проходческих ножей, обеспечения возможности корректировк направления их выдвижки, повьпиения герметичности зазоров между ножами, снижения трудоемкости передвижения опережающей крепи и возведения постоянной крепи.
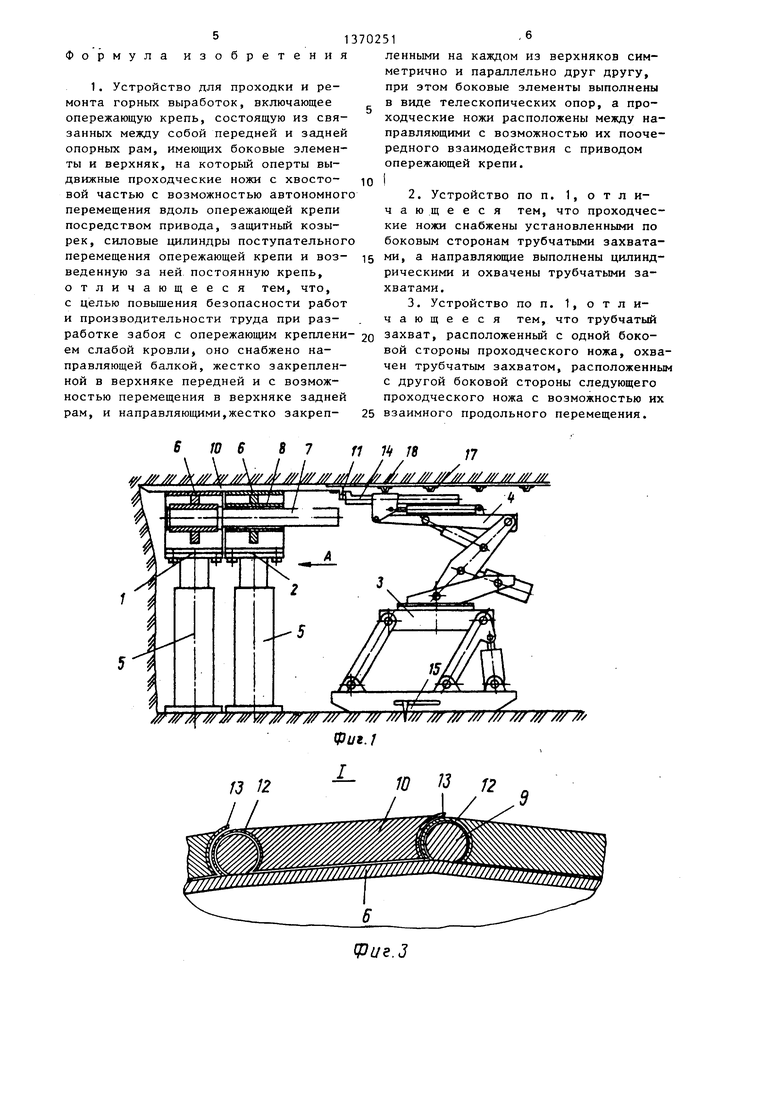
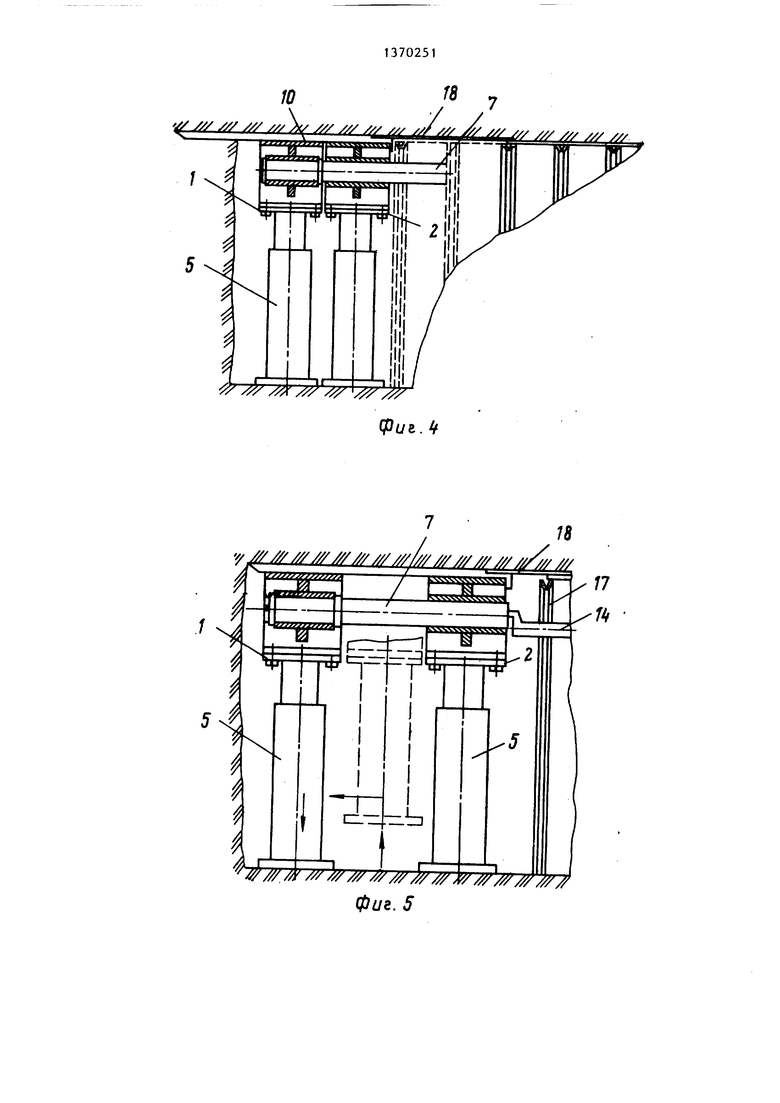
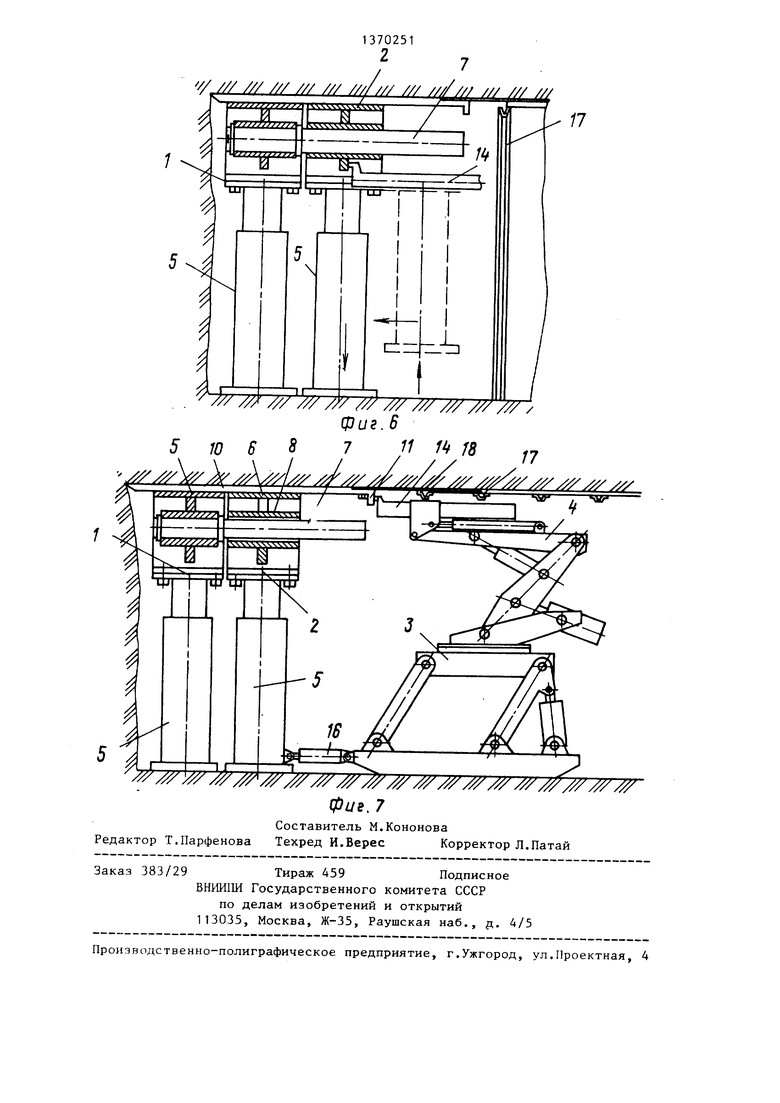
На фиг. 1 изображено предлагаемое устройство, установленное в горной выработке, общий вид сбоку; на фиг. 2 - вид А на фиг. 1 (на опережающую крепь); на фиг. 3 - узел I на фиг. 2; на фиг. 4 - опережающая крепь с задавленными в забой про- ходческими ножами, вид сбоку; на фиг. 5 - процесс передвижки к забою передней опорной рамы; на фиг. 6 - то же, задней опорной рамы; на фиг. 7 - предлагаемое устройство с гидроцилиндрами, связывающими заднюю опорную раму с проходческим полком, вид сбоку.
Устройство для проходки и ремонта горных выработок включает опережающую крепь, состоящую из передней 1 и задней 2 опорных рам и отдельного проходческого полка 3 с установленным на нем манипулятором 4. Каждая из опорных рам 1 и 2 имеет по две одинаковых по конструкции телескопических гидрофицированных опоры 5, на которых установлены верхняки 6. В верхняке 6 передней рамы 1 одной стороной жестко закреплена на
f,
0 5 0
5
правляющая балка 7, ось которой расположена в направлении проходки вьфаботки.
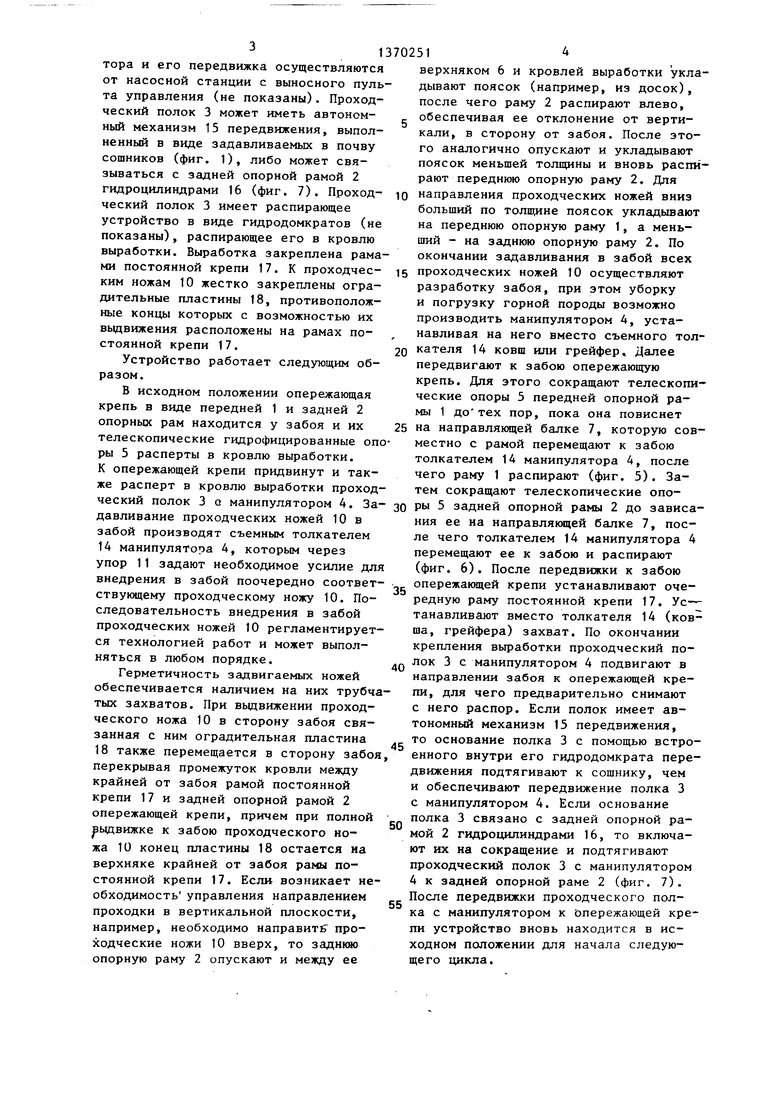
Направляющая балка 7 пропущена через втулку 8 верхняка 6 задней опорной рамы 2 с возможностью продольного перемещения, причем между втулкой 8 и направляющей балкой 7 имеется зазор, позволяющий опускать одну из опорных рам относительно другой. По верху каждого из верхняков 6 опорных рам 1 и 2 симметрично и параллельно друг относительно друга (на верхняках обеих рам) жестко закреплены одинаковые по конструкции цилиндрические направляющие 9, между которыми расположены проходческие ножи 10, заостренные спереди, со стороны забоя, и имеющие упоры 11 с обратной стороны. По одной из боковых сторон каждого проходческого ножа 10 жестко установлены трубчатые захваты 12, непосредственно охватывающие с возможностью продольного перемещения и зазором, необходимым для опускания одной из рам (1 или 2) относительно другой цилиндрические направляющие 9. По другой боковой стороне каждого проходческого ножа 10 жестко закреплены трубчатые захваты 13, охватывающие с возможностью продольного перемещения и необходимым зазором трубчатые захваты 12 соседних проходчес- киъ ножей. Манипулятор 4 имеет съемный толкатель 14 для задавливания в забой проходческих ножей Ю и передвижения опорных рам 1 и 2 опережающей крепи. Вместо съемного толкателя 14 на манипулятор могут быть установлены другие сменные инструменты (ковщ экскаваторный или погрузочный, захват, грейфер и др.), необходимые для механизации отдельных операций проходческого цикла. Работа манипулятора и его передвижка осуществляются от насосной станции с выносного пульта управления (не показаны). Проходческий полок 3 может иметь автономный механизм 15 передвижения, выполненный в виде задавливаемых в почву сошников (фиг. 1), либо может связываться с задней опорной рамой 2 гидроцилиндрами 16 (фиг. 7). Проходческий полок 3 имеет распирающее устройство в виде гидродомкратов (не показаны), распирающее его в кровлю выработки. Выработка закреплена рамами постоянной крепи 17. К проходческим ножам 10 жестко закреплены оградительные пластины 18, противоположные концы которых с возможностью их выдвижения расположены на рамах постоянной крепи 17.
Устройство работает следующим образом.
В исходном положении опережающая крепь в виде передней 1 и задней 2 опорных рам находится у забоя и их телескопические гидрофицированные опры 5 расперты в кровлю выработки. К опережающей крепи придвинут и также расперт в кровлю выработки проходческий полок 3 о манипулятором 4. За- зо Ры 5 задней опорной рамы 2 до зависадавливание проходческих ножей 10 в забой производят съемным толкателем 14 манипулятора 4, которым через упор 11 задают необходимое усилие для внедрения в забой поочередно соответствующему проходческому ножу 10. Последовательность внедрения в забой проходческих ножей 10 регламентируется технологией работ и может выполняться в любом порядке.
Герметичность задвигаемых ножей обеспечивается наличием на них трубчатых захватов. При вьщвижении проходческого ножа 10 в сторону забоя связанная с ним оградительная пластина 18 также перемещается в сторону забоя, перекрывая промежуток кровли между крайней от забоя рамой постоянной крепи 17 и задней опорной рамой 2 опережающей крепи, причем при полной ыдвижке к забою проходческого ножа 10 конец пластины 18 остается на верхняке крайней от забоя рамы постоянной крепи 17. Если возникает необходимость управления направлением проходки в вертикальной плоскости, например, необходимо направит проходческие ножи 10 вверх, то заднкно опорную раму 2 опускают и между ее
35
40
45
50
55
ния ее на направляющей балке 7, после чего толкателем 14 манипулятора 4 перемещают ее к забою и распирают (фиг. 6). После передвижки к забою опережающей крепи устанавливают очередную раму постоянной крепи 17. Ус- танавливают вместо толкателя 14 (ковша, грейфера) захват. По окончании крепления вьфаботки проходческий полок 3 с манипулятором 4 подвигают в направлении забоя к опережающей крепи, для чего предварительно снимают с него распор. Если полок имеет автономный механизм 15 передвижения, то основание полка 3 с помощью встроенного внутри его гидродомкрата передвижения подтягивают к сошнику, чем и обеспечивают передвижение полка 3 с манипулятором 4. Если основание полка 3 связано с задней опорной рамой 2 гидроцилиндрами 16, то включают их на сокращение и подтягивают проходческий полок 3 с манипулятором 4 к задней опорной раме 2 (фиг. 7). После передвижки проходческого полка с манипулятором к опережающей крепи устройство вновь находится в исходном положении для начала следующего цикла.
верхняком 6 и кровлей выработки укладывают поясок (например, из досок), после чего раму 2 распирают влево, обеспечивая ее отклонение от вертикали, в сторону от забоя. После этого аналогично опускают и укладывают поясок меньшей толщины и вновь распирают переднюю опорную раму 2, Для
направления проходческих ножей вниз больший по толщине поясок укладывают на переднюю опорную раму 1, а меньший - на заднюю опорную раму 2. По окончании задавливания в забой всех
проходческих ножей 10 осуществляют разработку забоя, при этом уборку и погрузку горной породы возможно производить манипулятором 4, устанавливая на него вместо съемного толкателя 14 ковш или грейфер. Далее передвигают к забою опережающую крепь. Для этого сокращают телескопические опоры 5 передней опорной рамы 1 до тех пор, пока она повиснет
на направляющей балке 7, которую совместно с рамой перемещают к забою толкателем 14 манипулятора 4, после чего раму 1 распирают (фиг. 5). Затем сокращают телескопические опо5
0
5
0
5
ния ее на направляющей балке 7, после чего толкателем 14 манипулятора 4 перемещают ее к забою и распирают (фиг. 6). После передвижки к забою опережающей крепи устанавливают очередную раму постоянной крепи 17. Ус- танавливают вместо толкателя 14 (ковша, грейфера) захват. По окончании крепления вьфаботки проходческий полок 3 с манипулятором 4 подвигают в направлении забоя к опережающей крепи, для чего предварительно снимают с него распор. Если полок имеет автономный механизм 15 передвижения, то основание полка 3 с помощью встроенного внутри его гидродомкрата передвижения подтягивают к сошнику, чем и обеспечивают передвижение полка 3 с манипулятором 4. Если основание полка 3 связано с задней опорной рамой 2 гидроцилиндрами 16, то включают их на сокращение и подтягивают проходческий полок 3 с манипулятором 4 к задней опорной раме 2 (фиг. 7). После передвижки проходческого полка с манипулятором к опережающей крепи устройство вновь находится в исходном положении для начала следующего цикла.
Формула изобретения
/// //////// //
tfp-Af
/W /y///f / /// ////// W ///л/// /////////////// ff
Фии
13 /2
- W /J 12
5
ленными на каждом из верхняков симметрично и параллельно друг другу, при этом боковые элементы выполнены в виде телескопических опор, а проходческие ножи расположены между направляющими с возможностью их поочередного взаимодействия с приводом опережающей крепи.
i
вой стороны проходческого ножа, охвачен трубчатым захватом, расположенным с другой боковой стороны следующего проходческого ножа с возможностью их взаимного продольного перемещения.
Vue.J
ю
у// ///////// //////////// //f
/
il ,
S
л
f
1
4
i
;
f8
f
/ /// jy/
7Г
il ,
(pf/e.
0г/г. 5
///// /// /// /// XX/ /////// /// ////// /// /// //
5 и 5 «
(Риг.В
7П W Я ,7
/X
У/У
/7
| Устройство для задавливания опережающей крепи | 1978 |
|
SU926311A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Самодвижущаяся крепь подземной выработки | 1975 |
|
SU645612A3 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
