Изобретение относится к машиностроению и может быть использовано в редукторах с повышенными требованиями к плавности и точности передачи, в частности в беззазорных передачах и приводах деликатных исполнительных механизмов (в сборочных и контрольных устройствах).
Разработки новых передаточных механизмов с телами качения в основном вызваны, стремлением повысить КПД и улучшить плавность, легкость хода и бесшумность при сохранении технологических возможностей зубчатых передач. Однако достижение более высоких динамических параметров за счет тел качения несет новые проблемы. В синусных передачах потери вызваны трением тел качения о сепаратор и наличием люфта при реверсе или знакопеременной нагрузке, а в механизмах с фрикционным способом передачи момента посредством колец, роликов и т.п. неизбежны потери кинематической точности и повторяемости при весьма ограниченных силовых характеристиках.
Известна планетарная передача с шаровыми сателлитами по а.с. N 1368545, кл. F 16 H 13/08, работающая по принципу синусного редуктора. В ней имеются подвижная и неподвижная обоймы с замкнутыми канавками разной периодичности и водило-сепаратор со сквозными пазами для шариков. При вращении ведущей обоймы шарики одновременно катятся по беговым дорожкам обоймы и скользят с некоторой закруткой вдоль прорезей водила, на стенках которых и возникает нормальная реакция от тел качения, создающая вращающий момент. Скольжение шариков вдоль стенок прорезей водила снижает эффект от применения тел качения, является причиной повышенного износа и снижает КПД.
Наиболее близкой к заявляемой передаче является фрикционная передача по а.с. N 1432297, кл. F 16 H 13/08, принятая заявителем за прототип.
Передача имеет на входе эксцентрично смещенный ведущий вал, фрикционно связанный посредством тел качения разного диаметра с внутренней поверхностью замыкающего кольца, являющегося выходным звеном передачи. Тела качения разделены друг от друга роликами.
Передача крутящего момента осуществляется силами трения, возникающими от контакта эксцентричного вала в фазе приращения его радиуса с соответствующими этой фазе телами качения. Вторая половина системы тел качения, связанных с эксцентричным валом в нисходящей фазе изменения радиуса, момента вращения не предает.
Несмотря на заклинивающий эффект, регулирующий силу трения в фрикционных парах и возникающий как реакция на момент сопротивления на выходном валу, грузонесущие свойства передачи и ее эффективность ограничены. Это вызвано тем, что при возможности нарастания клинового эффекта возникают недопустимо высокие контакты напряжения, которые и ограничивают передаваемый момент. Кроме того, на работоспособность такой передачи большое значение оказывает точность расчета и изготовления различных по диаметру тел качения. Потеря кинематической связи тел качения при проскальзывании неизбежно снижает угловую точность передачи и, соответственно, технологические возможности ее применения.
Технической задачей, решаемой данным изобретением, является повышение КПД и расширение технологических возможностей передачи.
Данный технический результат достигается тем, что в передаче, работающей по комбинированному принципу синусного и фрикционного механизмов, вращение от ведущего вала через кривошип передается водилу, связанному с роликами, которые обкатываются внутри колец, находящихся в контакте с кривошипом и охватывающим кулачком, профиль которого определяется некоторой периодической функцией, выражающей приращение его радиуса в зависимости от передаточного числа, заданного целым числом, и от величины эксцентриситета кривошипа с учетом линейных размеров, участвующих в кинематической цепи звеньев. В процессе силового контакта одновременно всех тел качения (колец), величина передаваемого момента определяется суммой двух других моментов, один из которых возникает от составляющей нормальных реакций, приложенной к центру кольца, а другой - от силы трения в точке контакта относительно центра вращения кривошипа. Причем соотношение этих моментов зависит от величины эксцетриситета кривошипа, что и определяет степень возникающего клинового эффекта и, соответственно, конструктивные и силовые параметры передачи. Однако при любых значениях эксцентриситета кривошипа заданное передаточное число механизма во всех его угловых положениях обеспечивается жесткой кинематической связью звеньев передачи. Нарушение кинематической связи возможно лишь при недопустимых деформациях как результат перегрузки.
Возможны два варианта планетарной передачи с кольцевыми телами качения. По варианту I (фиг. 1, 2) передача снабжена водилом, имеющим радиально расположенные отверстия с диаметрами, на два эксцентриситета кривошипа превышающими диаметр роликов, профиль кулачка задан периодической функцией, выражающей приращение его радиуса в зависимости от передаточного числа и зависящей от величины эксцентриситета кривошипа с учетом безразрывной кинематической связи всех взаимодействующих звеньев, тела качения выполнения в виде одинаковых колец, которые изнутри поджаты к кривошипу роликами, размещенными в радиально расположенных отверстиях водила и жестко закрепленных на несущем элементе, который свободно размещен в корпусе с возможностью вращения и плоскопараллельного перемещения по радиусу в пределах эксцентриситета кривошипа.
В варианте II (фиг. 3, 4) передача снабжена водилом, ролики жестко закреплены на водиле, профиль кулачка задан периодической функцией, выражающей приращение его радиуса в зависимости от передаточного числа и от величины эксцентриситета кривошипа, а тела качения выполнены в виде одинаковых колец, диаметр которых на два эксцентриситета превышает диаметр роликов и которые имеют возможность перемещаться вокруг оси ролика и занимать различные угловые положения между собой в зависимости от угла контакта с профилем кулачка при условии кинематической связи всех звеньев передачи.
Объединение двух технических решений в одну заявку связано с тем, что два данных устройства решают одну и ту же задачу - повышение КПД и расширение технологических возможностей передачи, являются изобретениями одного вида одинакового назначения, образующими общий изобретательский уровень, обеспечивающими получение одного и того же технического результата одним и тем же путем, но различными вариантами.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство по варианту I отличается от прототипа тем, что оно снабжено водилом, имеющим радиально расположенные отверстия с диаметрами, на два эксцентриситета кривошипа превышающими диаметр роликов, профиль кулачка задан периодической функцией, выражающей приращение его радиуса в зависимости от передаточного числа и зависящей от величины эксцентриситета кривошипа с учетом безразрывной кинематической связи всех взаимодействующих звеньев, тела качения выполнены в виде одинаковых колец, которые изнутри поджаты к кривошипу роликами, размещенными в радиально расположенных отверстиях водила и жестко закрепленных на несущем элементе, который свободно размещен в корпусе с возможностью вращения и плоскопараллельного перемещения по радиусу в пределах эксцентриситета кривошипа.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство по варианту II отличается от прототипа тем, что оно снабжено водилом, ролики жестко закреплены на водиле, профиль кулачка задан периодической функцией, выражающей приращение его радиуса в зависимости от передаточного числа и от величины эксцентриситета кривошипа, а тела качения выполнены в виде одинаковых колец, диаметр которых на два эксцентриситета превышает диаметр роликов и которые имеют возможность перемещаться вокруг оси ролика и занимать различные угловые положения между собой в зависимости от угла контакта с профилем кулачка при условии кинематической связи всех звеньев передачи.
Таким образом, заявляемые устройства соответствуют критерию изобретения "новизна".
Сравнение заявляемых решений с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие заявляемые решения от прототипа, что позволило сделать вывод о соответствии их изобретательскому уровню.
На фиг. 1 изображена кинематическая схема передачи по варианту I.
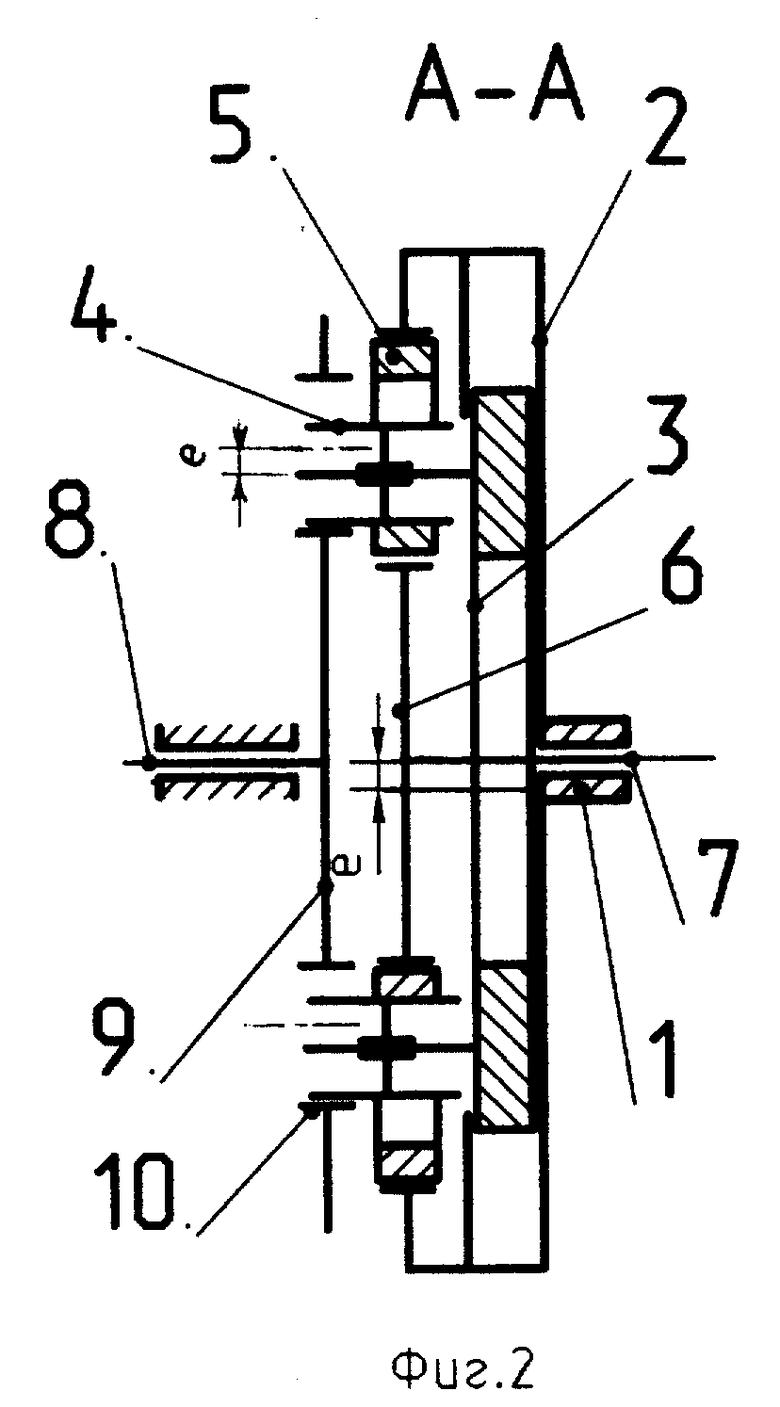
На фиг.2 - разрез А-А на фиг.1.
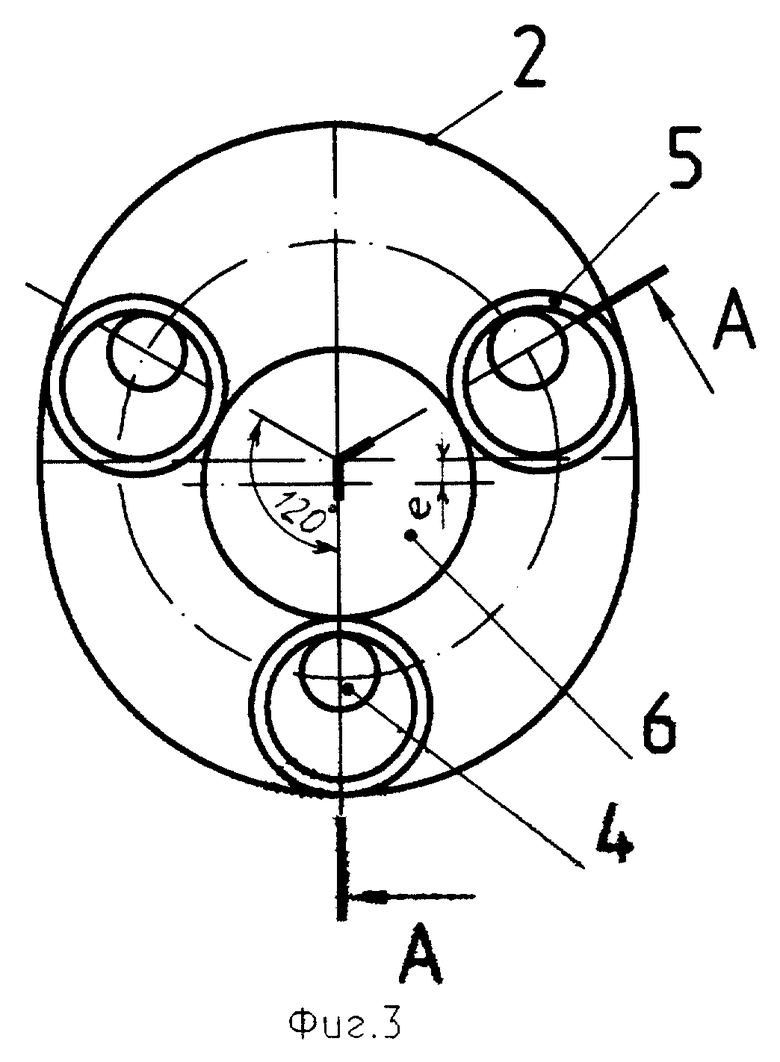
На фиг.3 - схема передачи по варианту II.
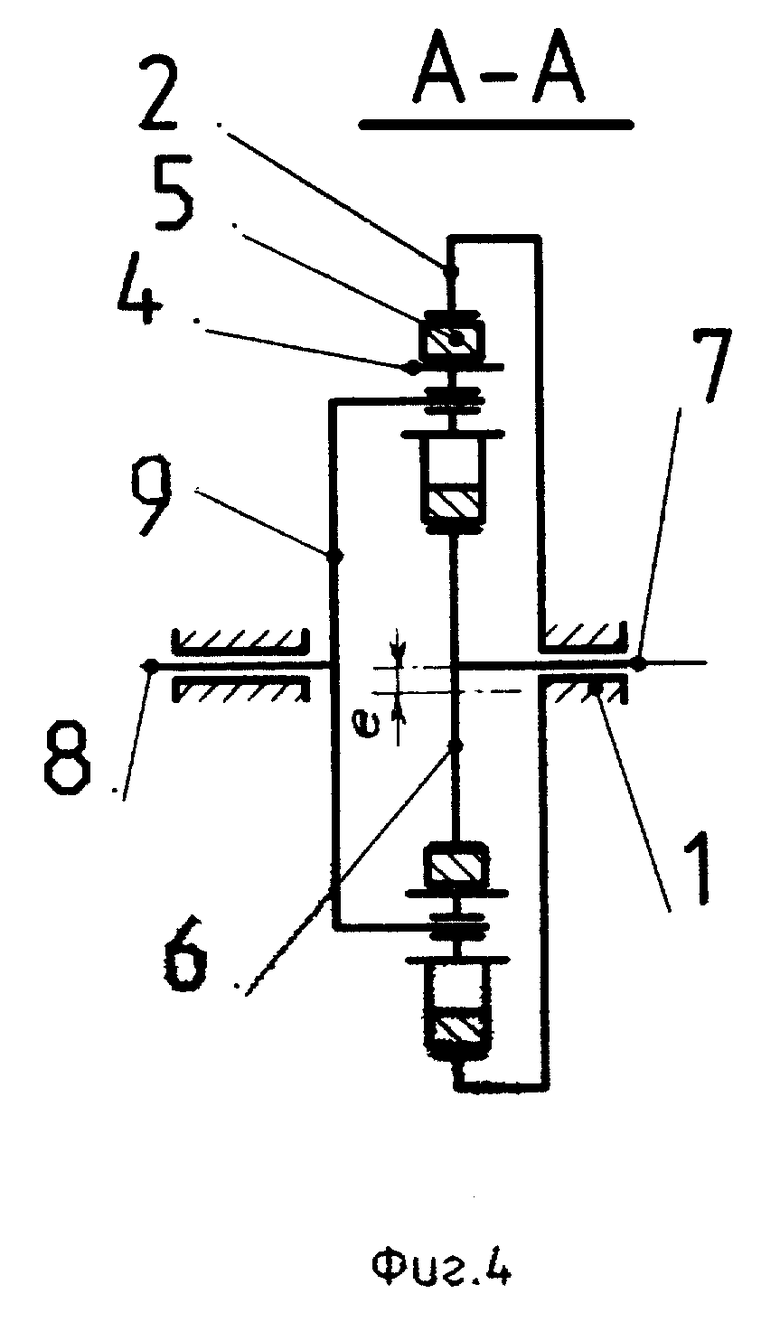
На фиг.4 - разрез А-А на фиг.3.
На фиг.5 - кинематический аналог передачи по варианту I.
На фиг.6 - кинематический аналог передачи по варианту II.
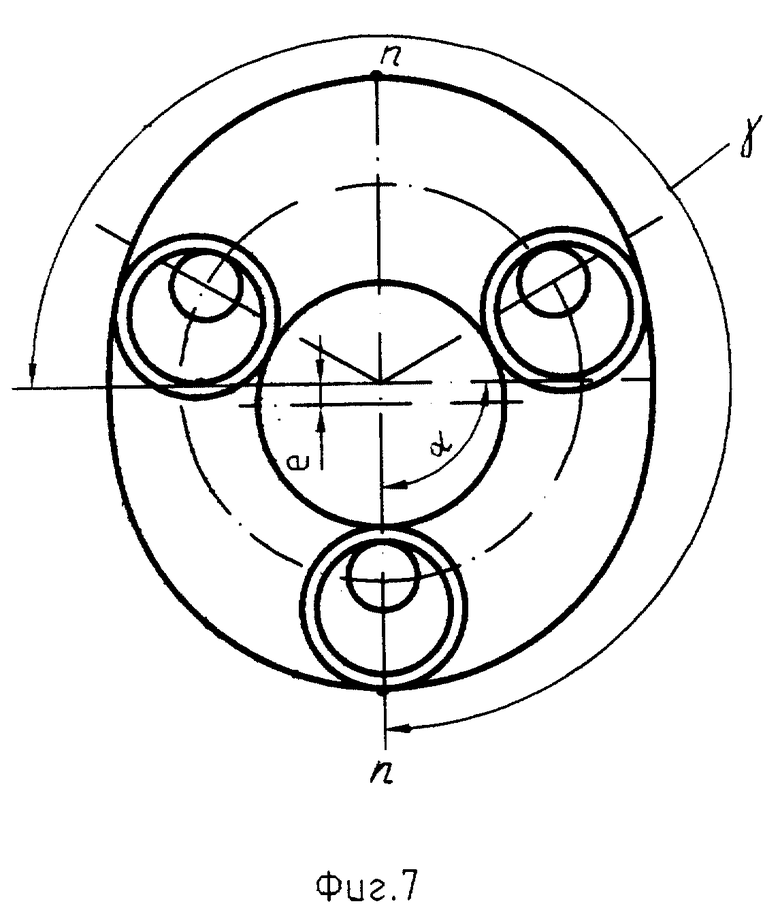
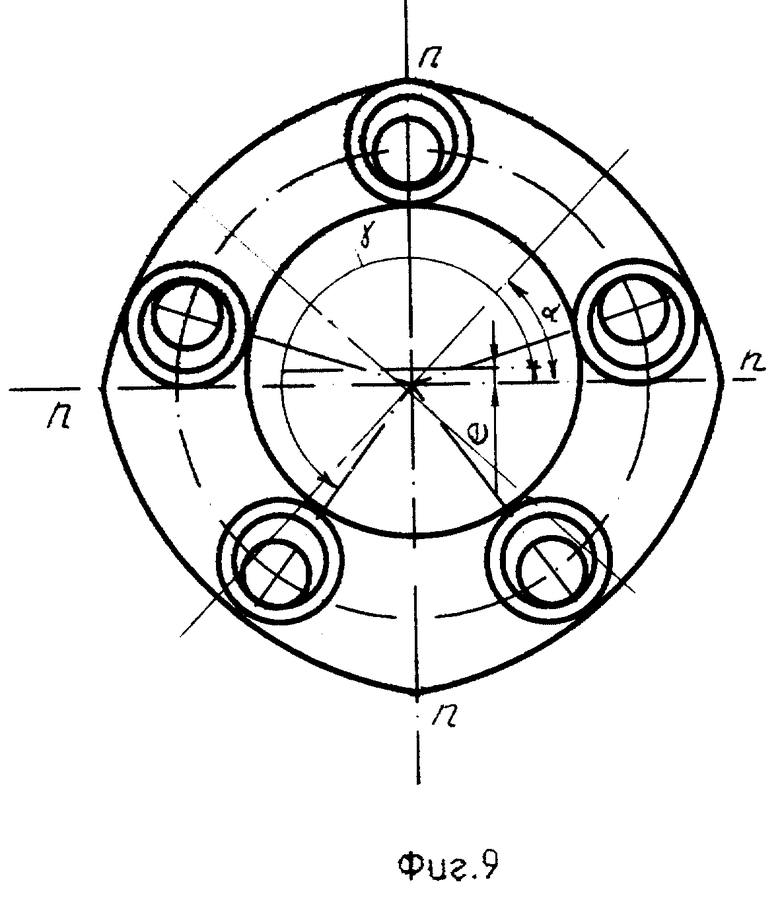
На фиг. 7, 8, 9 - пояснения к образованию кинематических схем с различными передаточными числами, равными 3, 4 и 5.
Планетарная передача состоит из корпуса 1, кулачка 2, несущего элемента 3 с роликами 4, имеющими возможность обкатываться внутри колец 5, которые замыкаются на кулачке 2 и кривошипе 6, связанном с входным валом 7. Для передачи по варианту I (фиг.1, 2) момент на выходной вал 8 может передаваться посредством шарнирно параллелограмма в виде водила 9 с радиально расположенными на нем отверстиями 10, диаметр которых на два эксцентриситета кривошипа 6 больше диаметра роликов 4. Несущий элемент 3 не имеет центрального подшипника и является "плавающим" по радиусу в пределах эксцентриситета e, равного расстоянию между осью вращения 0 кривошипа 6 и его собственной осью А.
В передаче по варианту II (фиг.3, 4) выходной вал 8 жестко связан с водилом 9, положение которого в пространстве меняется только по углу без плоскопараллельных смещений.
Для всех вариантов передачи (фиг. 7, 8, 9), в зависимости от числа n вершин кулачка 2, описанные параметры выражаются следующим образом: минимальный угловой ход несущего элемента 3 для одного законченного цикла перемещения равен:
где
n - число периодов кулачка 2,
при этом минимальный угловой ход кривошипа 6 равен:
γ = 180°+α.
Передаточное число равно:
Уравнение профиля кривой может быть определено, в зависимости от вариантов передачи, из кинематических схем механизмов-аналогов (фиг.5, 6), включающих в свой состав все участвующие звенья передачи, считая, что ведущее и ведомое звенья вращаются с угловыми скоростями, соответствующими заданному передаточному числу, т.е.

где
ωк - угловая скорость кривошипа 6,
ωв - угловая скорость выходного вала 8.
В соответствии с передаточным числом угол несущего элемента 3 относительно осей координат через угол кривошипа 6 (фиг.7, 8, 9) равен:
Для передачи по варианту I (фиг.5) кинематический аналог представляет собой кулисно-кривошипный механизм, где кривошип OA = e шарнирно связан с шатуном B, приводящим в движение вдоль кулисы E ползун K, на конце которого точка D описывает профиль кулачка 2. Точка C соответствует мгновенному радиусу несущего элемента 3.
R - радиус несущего элемента 3,
R - радиус кольца 5,
e - величина эксцентриситета кривошипа 6,
ϕ - мгновенное значение угла OAC,
α - угол повтора кривошипа 6.
Центр кольца 5 расположен в точке L. Центр роликов 4 расположен в точке C. Положение звена E определяет положение мгновенного радиуса несущего элемента 3, где ρ = OC.
Отсюда уравнение профиля кулачка 2:
R1= ρ+e+R2, где 
Кинематический аналог варианта II передачи (фиг.6) представляет собой комбинацию шарнирного антипараллелограмма OALC, связанного шарнирно со звеном M, точка V которого является точкой контакта ролика 4 с кольцом 5, один конец скользит вдоль точки O, а другой в точке W проходит через муфту Мольдгейма. Точка D шарнирно закрепленного звена LD описывает профиль кулачка 2.
Угол h - угол поворота водила 9.
Уравнение профиля кулачка 2 может быть задана следующим образом:

где
угол β равен:
Передача работает следующим образом.
При вращении ведущего вала 7 движение от кривошипа 6 по варианту I передается кольцами 5, которые, находясь в кинетической связи с кулачком 2, вынуждены обкатываться по его внутреннему профилю, увлекая за собой ролики 4 с несущим элементом 3. В зависимости от схемы вращение на выходной вал может по варианту II непосредственно передаваться от водила 9 (фиг. 3, 4) или по варианту I - с помощью шарнирного параллелограмма в виде группы отверстий 10, выполненных на водиле 9, внутри которых совершают обкатку ролики 4, одновременно находящиеся в контакте с кольцами 5. Центры отверстий 10 и, соответственно, выходной вал 8 имеют постоянную угловую скорость в отличии от угловой скорости колец 5. Взаимное расположение колец 5 в процессе совместной обкатки также все время меняется относительно центральной оси.
Схемное решение обоих механизмов позволяет на выходе в сумме получать постоянное значение передаваемого момента и постоянное, без пульсации, передаточное число. Практически, полное отсутствие трения скольжения в парах, участвующих в передаче, позволяет поднять КПД, улучшить динамические характеристики и достигнуть кинематической точности.
Изготовление устройств по обоим вариантам выявило следующее. Несмотря на большую кинематическую привлекательность варианта II (простота конструкции), он накладывает дополнительные требования к точности изготовления всех участвующих в обработке звеньев. Исполнение же конструкции по варианту I практически не чувствительно как к точности изготовления тел качения, так и даже к точности расчета криволинейной формы кулачка.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИКЛОИДНАЯ ПЕРЕДАЧА С ТЕЛАМИ КАЧЕНИЯ | 2012 |
|
RU2497030C1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2384774C1 |
| ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2006 |
|
RU2329422C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ПРИВОД С ЗАМКНУТОЙ КИНЕМАТИЧЕСКОЙ ЦЕПЬЮ | 1995 |
|
RU2105912C1 |
| Синусная многорядная передача | 1990 |
|
SU1737188A1 |
| ПЕРЕДАЮЩИЙ УЗЕЛ С КАЧАЮЩЕЙСЯ ШАЙБОЙ (ВАРИАНТЫ) И ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ НА ЕГО ОСНОВЕ (ВАРИАНТЫ) | 2001 |
|
RU2267673C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ "РЕДУКТОР-ПОДШИПНИК" | 2001 |
|
RU2179272C1 |



Изобретение направлено на повышение КПД и расширение технологических возможностей передачи. Тела качения выполнены в виде одинаковых колец. Кольца изнутри поджаты к кривошипу роликами. Снаружи кольца схвачены зафиксированным кулачком, профиль которого задан периодической функцией, выражающей приращение его радиуса в зависимости от передаточного числа и зависящей от величины эксцентриситета кривошипа с учетом безразрывной кинематической связи всех взаимодействующих звеньев. Ролики одновременно размещены в радиально расположенных отверстиях водила и жестко закреплены на несущем элементе. Несущий элемент свободно размещен в корпусе с возможностью вращения и плоскопараллельного перемещения по радиусу в пределах эксцентриситета кривошипа. Диаметры отверстий водила на два эксцентриситета превышают диаметр роликов. Такое выполнение передачи позволяет повысить КПД и расширить технологические возможности. 2 с.п.ф-лы, 9 ил.
| Фрикционная планетарная передача | 1987 |
|
SU1477967A1 |
| Фрикционная планетарная передача | 1990 |
|
SU1733770A1 |
| Фрикционная многопоточная передача | 1987 |
|
SU1432297A1 |
