г8
27
(Л
оо
ел
Г)
;о
Изобретение относится к отрасли сельскохозяйственного машиностроения, в частности к машинам для уборки винограда
Цель изобретения повышение производительности.
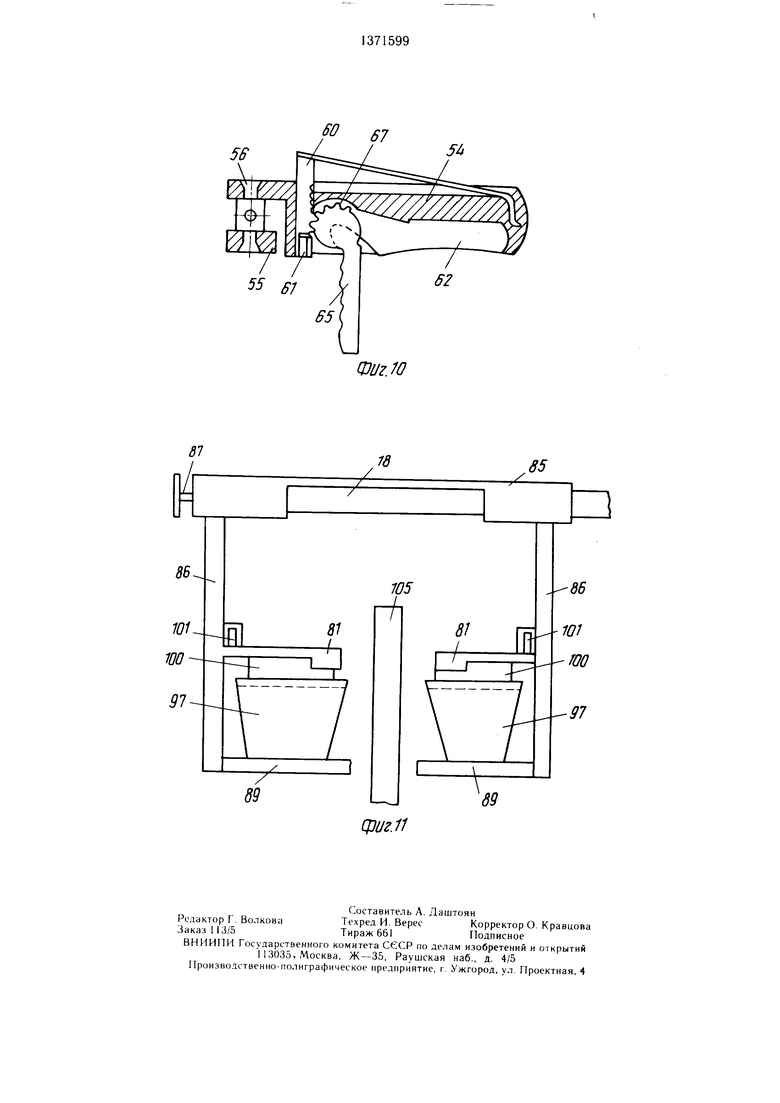
На фиг. 1 изображена виноградоубороч- ная ма1иина, вид сбоку; на фиг. 2 рабочие органы, вид снереди; на фиг. 3 машина, вид сбоку; на фиг. 4 диск с подпружиненными пальцами и фигурной дорожкой копира левого рабочего органа; на фиг. 5 диск с подпружиненными пальцами и фигурной дорожкой правого рабочего opi-ана; на фиг. 6 - диск с Г1-обра.чными желоба.ми; на фиг. 7 копир; на фиг. 8 палец, сечение; на фиг. 9 - налец с ножом при попадании проволоки в зону резания; на фиг. 10 - палец с ножом; на фиг. 1 1 машина, вид сзади.
Виноградоуборочная машина устанавливается на трансп(фтном средстве и состоит из вертикальны.х телескопических колонн 1 и 2. Машина содержит основания 3 и 4. Колонны 1 и 2 состоят из неподвижных частей 5 и 6, снабженных резьбой 7 и 8, резьбовых гаек 9 и 10, снабженных кол1)Цевыми пазами 11 и 12 и ручками 13 и 14. В кольцевых пазах II и 12 размешены выступы скоб 15 и 16, неподвижно закрепленные на основаниях 3 и 4.
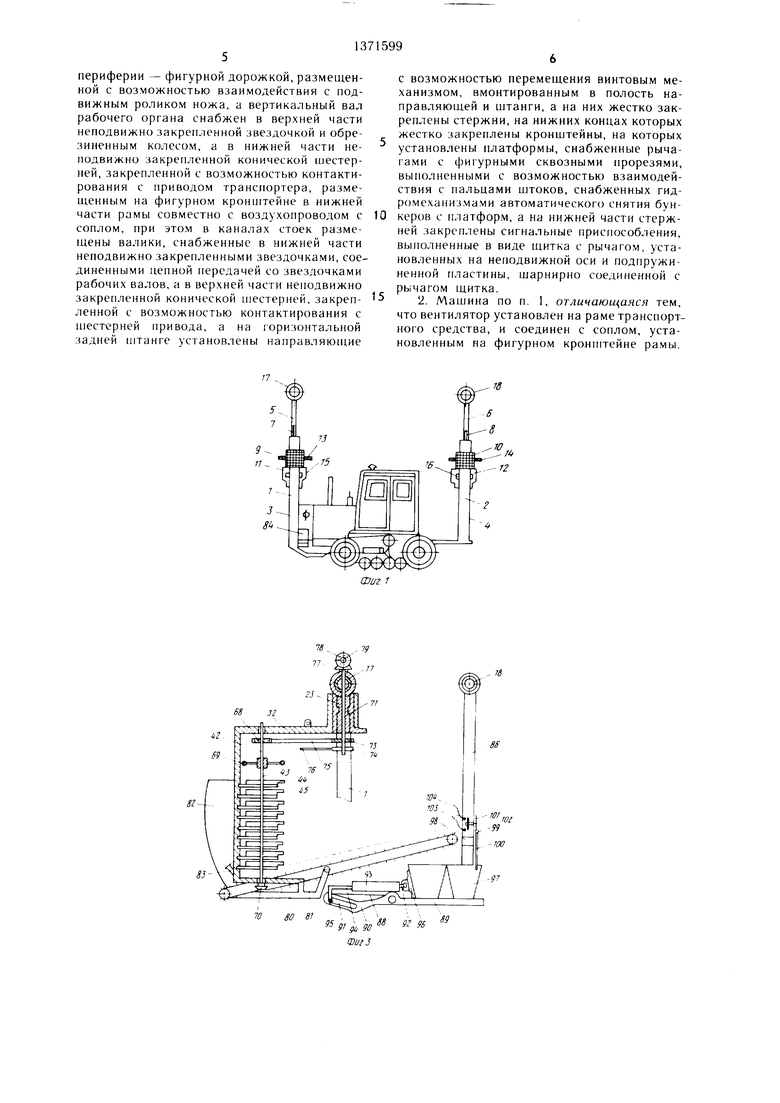
К верхним частя.м телескопических колонн жестко п)ик)еплены гориз(л1тальнь1е 1птанги 17 и 18. На uiTaHie 17 смо1ггированы направляющие 19 и 20 с возможностью перемещения на штанге, снабженные сквозными отверстиями против каналов 21 и 22, стоек 23 и 24, жестко закрепленных на нанравляю- ших 19 и 20 и снабженных наружными радиальными паза.ми 25 и 26. В по.чостях П1танги 17 и направляюших 19 и 29 вмонтирован винт 27, снабженный ручками 28 и 29, и нравой и левой резьбами, контактирующими с гайками 30 и 31, неподвижно закрепленными в торцовых канала.х направляюших, причем БИНТ 27 (1ван в полости штанг и 17 от 11родо;|ьного смещения (фиг. 1). На стойках 23 и 24 установлены подпружиненные рамы 32 и 33, 34 и 35 с возможностью радиа;1ьного поворота, зафиксированные от вертика.льногч) смещения стопорами 36 и 37 в радиал1)НЫх iia3ax 25 и 26. На ра.мах установлены рабочие органы 38 41 (фиг. 2-3), содержащие вертикальные валы 42, снабженнь1е продольными пазами 43, а на валах с.монтированы по- нарно диски 44 и копиры 45. Диски снабжены в центре отверстием 46 с выступом 47 по форме вала и П-образными направляющими 48 с отогнутой задней стенкой 49 (но ходу вращения диска). Копиры снабжены в центре отверстием 50 диаметром, большим диаметра вала, а на периферии фигурны- .ми дорожка.ми 51, нружинистыми скосами 52, фигурными выступами 53 (фиг. 4-7).
0
5
0
5
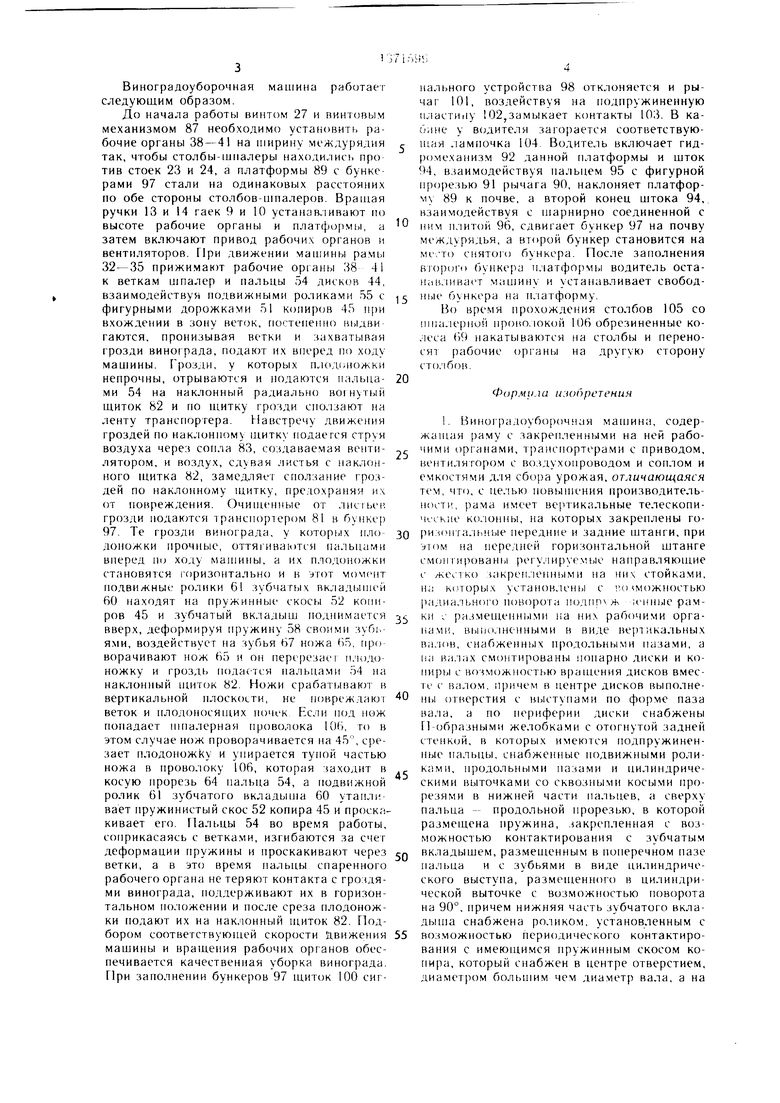
В П-образных желобах размешены подпружиненные пальцы 54, снабженные подвижными роликами 55, установленными на неподвижных осях 56, верхней прорезью 57 для крепления пружины 58, поперечным пазом 59, в котором размещен зубчатый вкла- дыщ 60, контактирующий с пружиной 58 и снабженный в нижней части подвижным роликом 61, периодически контактирующим с пружинистым скосом 52, продольным пазом 62 с цилиндрической выточкой 63 и сквозной косой прорезью 64. Нож 65 снабжен цилиндрическим выступом 66, контактирующим с цилиндрической выточкой пальца с возможностью поворота на 90°, и зубьями 67, контактирующими с зубчатым вкладышем 60 (фиг. 8-10). Верхняя часть вертикального вала рабочего органа снабжена неподвижно закрепленной звездочкой 68, обрезиненным колесом 69 для переноса рабочего органа через столбы-щпалеры, а на нижней части вала неподвижно закреплена коническая шестерня 70, взаимодействующая с приводом транспорта. В каналах стоек 23 и 24 размещены вертикальные валики 71 и 72, снабженные в нижней части неподвижно закрепленными звездочками 73 и 74, соединенные цепной передачей 75 и 76 со звездочками вертикальных валов рабочих органов, а в верхней части валик снабжен неподвижно закрепленной конической шестерней 77, контактирующей с конической щестерней
„ 78 горизонтального вала 79 силового привода. В нижней части рамы на фигурном кронштейне 80 установлен транспортер 81 с наклонным радиально вогнутым щитком 82 и воздухопроводом с соплом 83 вентилятора 84, установленного на транспортном
5 средстве.
На горизонтальной штанге 18 смонтированы направляющие 85 с возможностью смещения на щтанге, а на них жестко закреплены стержни 86, а в полостях штанги и направляющих смонтирован винтовой меха0 низм 87 перемещения направляющих стержнями на щтанге. В нижней части стержни снабжены жестко закрепленными кронштейнами 88, на которых щарнирно смонтированы платформы 89, снабженные рычагами 90 с фигурными прорезями 91, и гидромеханизмы 92 с гидроцилиндрами 93, двухконечные штоки 94, снабженные с одной стороны пальцами 95, контаткирующими с фигурными сквозными прорезями 91 рычагов платформ, а с другой стороны щарнирно
Q соединенные с опорными плитами 96 снятия бункеров 97 с платформы. На нижней части стержней закреплены сигнальные устройства 98, содержащие установленные на неподвижных осях 99 щитки 100 с рычагами 101, щарнирно соединенные с подпружиненными пластинами 102 замыкания контактов 103 сигнальных лампочек 104, помещенных в кабине водителя. На столбах 105 натянута щпалерная проволока 106.
5
5
Виноградоуборочная машина работает следующим образом.
До начала работы винтом 27 и Е ИНТОВЫМ механизмом 87 необходимо установить рабочие органы 38 - 41 на пжрину ме/кдурядия так, чтобы столбычииалеры находились про тив стоек 23 и 24, а платформы 89 с бункерами 97 стали на одинаковых расстояних по обе стороны столбов-ишалеров. Врашая ручки 13 и 14 гаек 9 и 10 устанав,1ивают по высоте рабочие органы и плат(()о)мы, а затем включают привод рабочих органов и вентиляторов. При движении машины pa.vuii 32-35 прижимают рабочие органы 38 41 к веткам шпалер и пальцы 54 дисков 44, взаимодействуя подвижными ролика.ми 55 с фигурными дорожками 51 копиров 45 вхождении в зону веток, постепенно выдвигаются, пронизывая ветки и захватывая грозди винограда, подают их вперед по ходу машины. Грозди, у которых плодоножки непрочны, отрываются и подаются пальцами 54 на наклонный радиально вогнутый щиток 82 и по щитку грозди сползают на ленту транспортера. Навстречу движения гроздей по иак. юнпому щитку подаегся струя воздуха через сопла 83, создаваемая вентилятором, и воздух, сдувая листья с наклонного щитка 82, замедляет сползание гроздей по наклонному плитку, предохраняя их от повреждения. Очип1ен11ые от лнсгыч , грозди подаются ipaHcnopiepoM 81 в бункер 97. Те грозди винограда, у которых плодоножки прочные, оттягиваются пальцами вперед по ходу мапжны, а их плодоножки становятся горизонтально и в утот момент подвижные ролики 61 зубчатьгх вкладьипей 60 находят на пружинные скосы 52 копиров 45 и зубчатый вкладыщ поднимается вверх, деформируя пружину 58 своими зубьями, воздействует па чубья 67 ножа ()5, проворачивают нож 65 и он пере|)езаег плодоножку и гроздь подас-тся пальпамп 54 на наклонный П1ит()к 82. Ножи срабат1)1нают в вертикальной плоскости, не повреждают веток и плодоносящих почек Если под нож попадает шпалерная проволока 106, то в этом случае нож проворачивается на 45, срезает плoдoнoжky и упирается тупой частью ножа в проволоку 106, которая заходит в косую прорезь 64 пальпа 54, а подвижной ролик 61 зубчатого вкладып1а 60 утапливает пружинистый скос 52 копира 45 и проскакивает его. Пальцы 54 во время работы, соприкасаясь с ветками, изгибаются за счет деформации пружины и проскакивают через ветки, а в это время пальцы спаренного рабочего органа не теряют контакта с гроздями винограда, поддерживают их в горизонтальном положении и после среза плодоножки подают их на наклонный щиток 82. Подбором соответствующей скорости Движения мащины и вращения рабочих органов обеспечивается качественная уборка винограда. При заполнении бункеров 97 щиток 100 сиг0
0
5
0
5
0
5
0
5
иального устройства 98 отклоняется и рычаг 101, воздействуя на подпружиненную 11ластиг1у 102,замыкает контакты 103. В кабине у В(иителя загорается соответствующая .шмпочка 104. Водитель включает гидромеханизм 92 данной платформы и шток 94, взаимодействуя пальцем 95 с фигурной прорезью 91 рычага 90, наклоняет платформу 89 к почве, а второй конец штока 94, взаимодействуя с щарнирпо соединенной с ним п.митой 96, сдвигает бункер 97 на почву междурядья, а второй бункер становится на ме. то СНЯТО1Ч) бункера. После заполнения BTOpoi o бункера платформы водитель оста- н;1в.1ивает м;ипину и устанавливает свобод- Hi.ie бункера па платформу.
Во время прохождения столбов 105 со ппалерпой проио.юкой 106 обрезиненные колеса ()9 накатываются на столбы и переносят рабочие opi aniji на другую сторону
СТО.чбо.
Формила изобретения
1. Виноградоуборочная машина, содержащая раму с закрепленными на ней рабочими органами, транспортерами с приводом, вентилягором с воздухопроводом и соплом и емкостями для сбо)а урожая, отличающаяся тем, что, с целью повып1ения производительности:, рама имеет ве(1тикальные телескопические ко. 1опны, на которых закреплены го- риз(пта.1ьные передние и задние штанги, при :Л()м на передней горизонтальной щтанге см(лпированг,1 регулируемые направляющие с жестко закреп.:1епн 1ми на них стойками, и; к.чорых установ,1сны с (мможностью ралиальн()1-о поворота псх ишхж 1епные рамки с размещенными па ни.х рабочими органами, вы| о;1ненными в виде вертикальных валов, снабженных продольными пазами, а на валах смонтированы попарно диски и копиры с возможностью вращения дисков вместе с валом, причем в центре дисков выполнены огнерстия с выступами по форме паза нала, а по периферии диски снабжены П-образными желобками с отогнутой задней стенк(й, в которых имеются подпружиненные пальцы, снабженные подвижными роликами, продольпыми пазами и цилиндрическими выточками со сквозными косыми прорезями в нижней части пальцев, а сверху пальца - продольной прорезью, в которой размещена пружина, закрепленная с возможностью контактирования с зубчатым вкладыщем, размещенным в поперечном пазе и с зубьями в виде цилиндрического выступа, размещенного в цилиндрической выточке с возможностью поворота на 90°, причем нижняя часть зубчатого вкла- дьипа снабжена ро,1иком, установленным с возможностью периодического контактирования с имеющимся пружинным скосом копира, который спабжен в центре отверстием, диаметром большим чем диаметр вала, а на
периферии - фигурной дорожкой, размешенной с возможностью взаимодействия с подвижным роликом ножа, а вертикальный вал рабочего органа снабжен в верхней части ненодвижно закрепленной звездочкой и обре- зиненным колесом, а в нижней части неподвижно закрепленной конической шестерней, закрепленной с возможностью контактирования с приводом транспортера, размещенным на фигурном кронп1тейне в нижней части рамы совместно с воздухопроводом с соплом, при этом в каналах стоек размещены валики, снабженные в нижней части неподвижно закрепленными звездочками, соединенными цепной передачей со звездочками рабочих валов, а в верхней части ненодвижно закрепленной конической шестерней, закрепленной с возможностью контактирования с пестерней привода, а на горизонтальной задней штанге установлены направляющие
0
с возможностью перемещения винтовым механизмом, вмонтированным в полость направляющей и щтанги, а на них жестко закреплены стержни, на нижних концах которых жестко закреплены кронштейны, на которых установлены платформы, снабженные рычагами с фигурными сквозными прорезями, выполненными с возможностью взаимодействия с пальцами штоков, снабженных гидромеханизмами автоматического снятия бункеров с платформ, а на нижней части стержней закреплены сигнальные приспособления, выполненные в виде щитка с рычагом, установленных на неподвижной оси и подпружиненной пластины, шарнирно соединенной с рычагом щитка.
2. Машина по п. 1, отличающаяся тем, что вентилятор установлен на раме транспортного средства, и соединен с соплом, установленным на фигурном кронн1тейне рамы.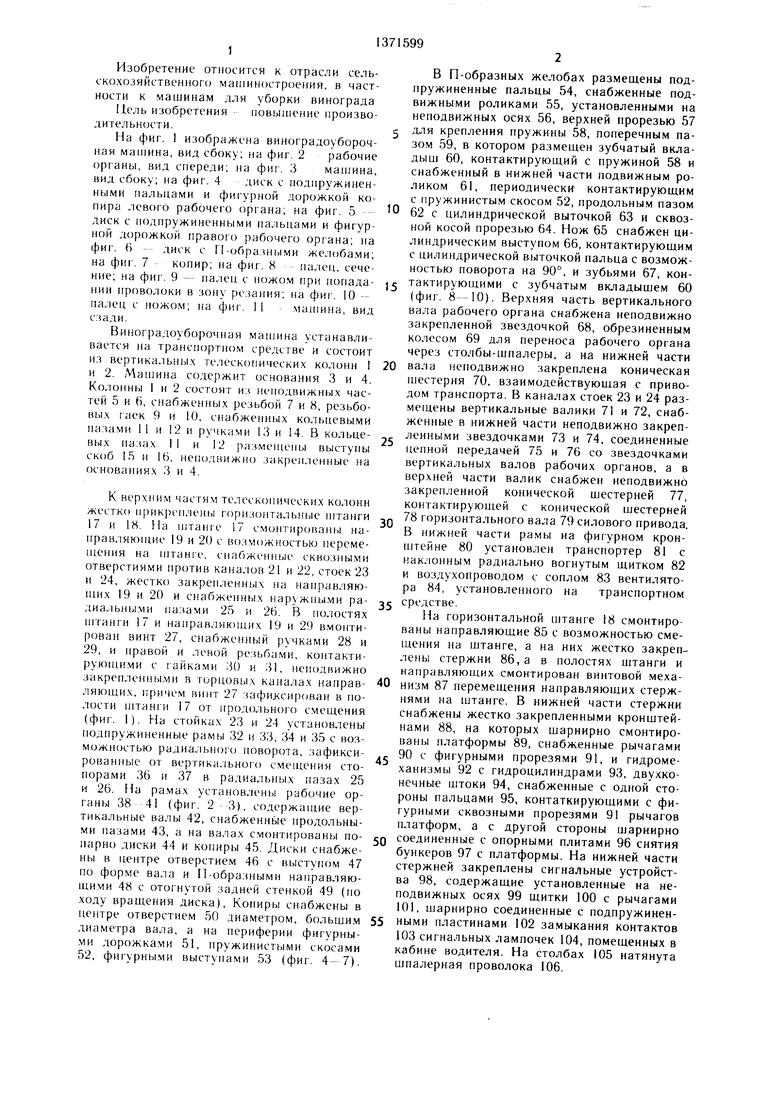
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный агрегат для виноградников | 1986 |
|
SU1443850A1 |
| Машина для подвязки растений к шпалерной проволоке | 1986 |
|
SU1373361A1 |
| Бороздковая свекловичная сеялка | 1987 |
|
SU1540679A1 |
| Устройство для подвязки растений к шпалерной проволоке | 1987 |
|
SU1588327A1 |
| Универсальный самоходный хлопкоуборочный комбайн | 1991 |
|
SU1819527A1 |
| Универсальная роторная пропашная широкозахватная сеялка | 1987 |
|
SU1563612A1 |
| Самоходный многорядный картофелеуборочный комбайн | 1990 |
|
SU1811772A1 |
| Картофелеуборочный комбайн | 1987 |
|
SU1768057A1 |
| Гидравлический агрегат для обрезки ветвей деревьев и кустарников | 1985 |
|
SU1303079A1 |
| Универсальная рассадопосадочная машина | 1987 |
|
SU1537166A1 |
Изобретение относится к отрасли сельскохозяйственного машиностроения, в частности к машинам для уборки винограда. Цель изобретения - повышение производительности. Виноградоуборочная машина состоит из телескопических колонн, к которым жестко прикреплены горизонтальные П1танги. На этих П1танга.х закреплены направляющие 19 и 20, на которых разме1лены стойки 23 и 24 с подпружиненными рамами 32-35 соответственно с рабочими органами 38 -41, содержащими вертикальные валы 42. Рабочие органы состоят из пальцев, снабженных роликами. Пальцы кинематически связаны с ножом, при работе машины врапн ние через валы 42 передается к пальцам рабочих органов 38-41. Контактируя с грозденожками гроздей, пальцы отрывают грозди. В случае, когда гроздь не отрывается, грозденожка срезается ножом. 1 з.п. ф-лы, 11 ил.
Sl--70 30 SI
S де да №/J
/(У
, IS
ss
Л S
56
19,
47
Фиг.
8
фиг.б
Фиг. 8
SS
5
Фиг. 5
фиг. 7 SO 58 57
54
фиг. 9
87
81
3
5
Фиг.Ю
/
18
85
81
-86
101 ЮС
-97
| Машина для сбора винограда | 1983 |
|
SU1135452A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Виноградоуборочная машина | 1973 |
|
SU1194316A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
