/5
(Л
со
о
СП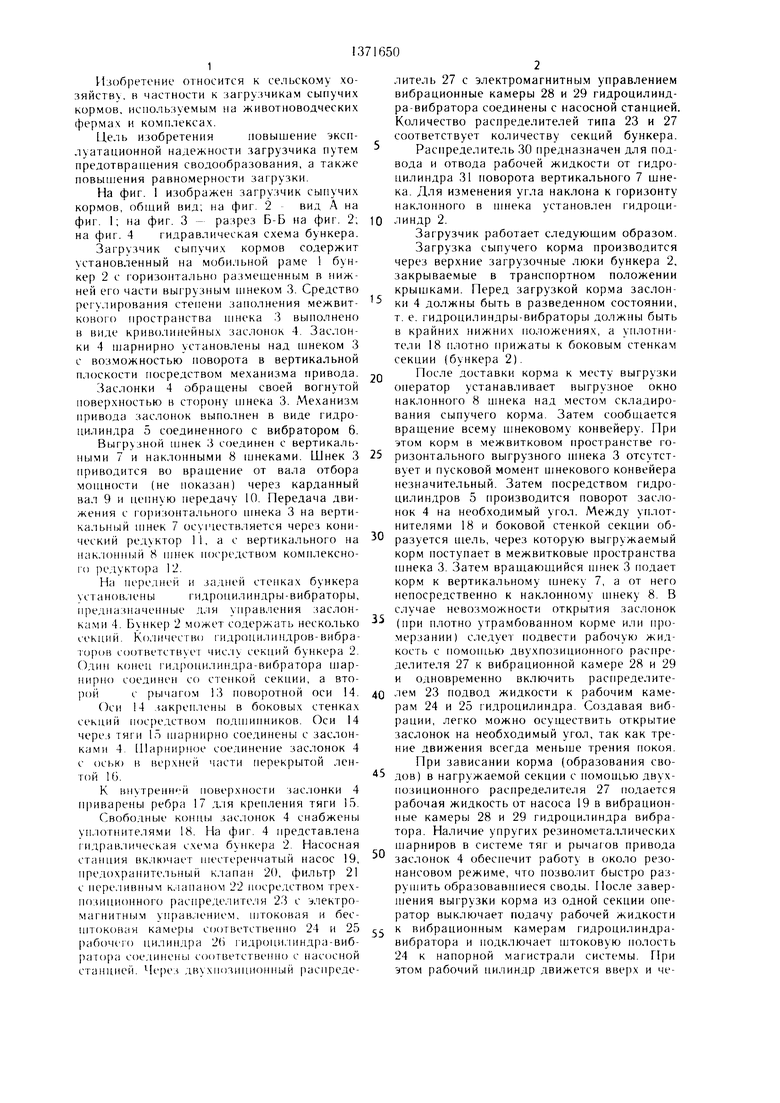
| название | год | авторы | номер документа |
|---|---|---|---|
| Бункер сыпучих кормов | 1985 |
|
SU1329702A1 |
| Бункер для сыпучих кормов | 1985 |
|
SU1393371A1 |
| Выгрузное устройство бункера зерноуборочного комбайна | 1988 |
|
SU1524847A1 |
| ЗАГРУЗЧИК СЕМЯН В СЕЯЛКИ | 2005 |
|
RU2283567C1 |
| Устройство для регулирования подачи корма мобильного кормораздатчика | 1983 |
|
SU1149905A2 |
| Смеситель-дозатор зерновой смеси | 2017 |
|
RU2644872C1 |
| Кормораздатчик-смеситель | 1988 |
|
SU1519603A2 |
| РАЗМОЛЬНО-СМЕСИТЕЛЬНЫЙ БЛОК | 2007 |
|
RU2353216C1 |
| Устройство для смешивания сыпучих кормов и добавок | 2016 |
|
RU2633893C1 |
| Устройство регулирования подачи корма мобильного кормораздатчика | 1981 |
|
SU959708A1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повышение эксплуатационной надежности загрузчика путем предотвращения сводообразования, а также повышение равномерности загрузки. Над горизонтальным выгрузным шнеком 3 шарнирно установлены заслонки 4. Заслонки 4 выполнены криволинейными и обращены вогнутой поверхностью в сторону шнека 3. Поворот заслонок 4 в вертикальной плоскости производится гидроцилиндрами 5. Свободные концы заслонок 4 имеют уплотнители 18. При загрузке корма заслонки 4 разведены в стороны, и их уплотнители 18 плотно прижаты к боковым стенкам бункера 2. После поворота заслонок 4 корм поступает в межвитковое пространство шме- ка 3. В случае образования свода включают в работу вибраторы 6. 4 ил.
Фиг. 2
Изобретение относится к сельскому хозяйству, в частности к загрузчикам сыпучих кормов, используемым на животноводческих фермах и комплексах.
Цель изобретенияповышение эксплуатационной надежности загрузчика путем предотвращения сводообразования, а также повып1ения равномерности загрузки.
На фиг. 1 изображен загрузчик сыпучих кормов, общий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 гидравлическая схема бункера.
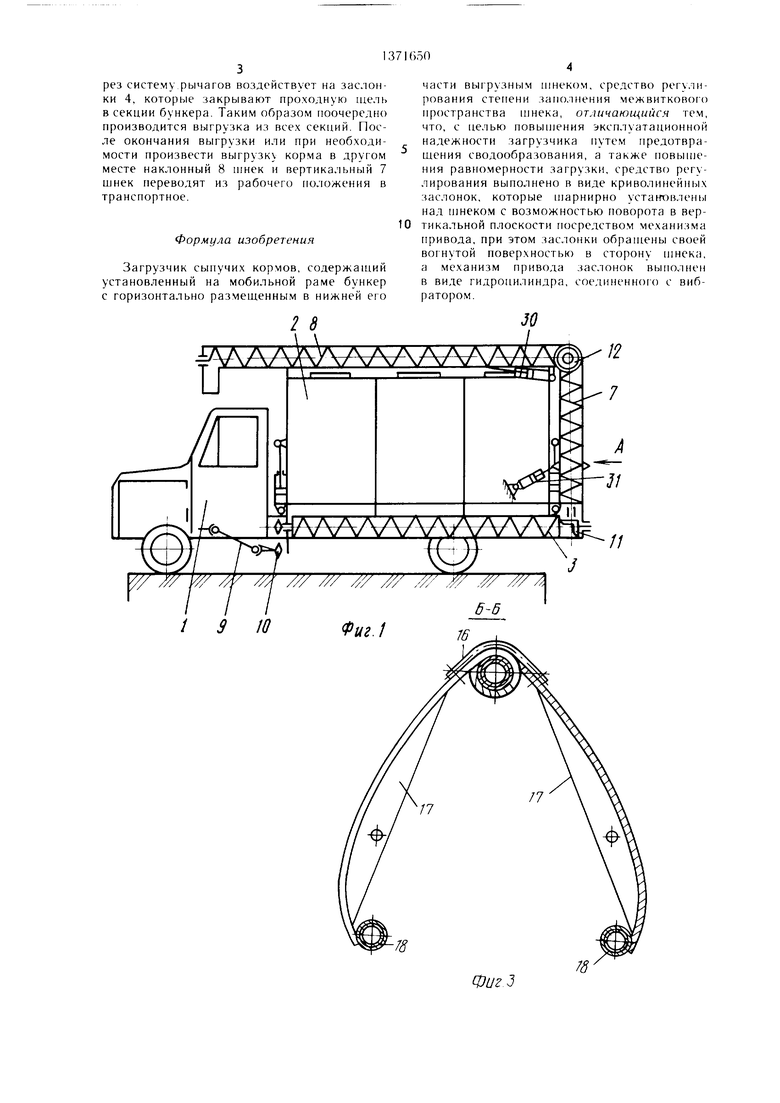
Загрузчик сыпучих кормов содержит установленный на мобильной раме 1 бункер 2 с горизонтально размещенным в нижней егч) части выгрузным шнеком 3. Средство регулирования степени заполнения межвит- коного пространства шнека 3 вьпюлнено в виде криво.чинейных заслонок 4. Заслонки 4 шарнирно установлены над (пнеком 3 с возможностью поворота в вертикальной плоскости посредством механизма привода.
Заслонки 4 обращены своей вогнутой поверхностью в сторону П1нека 3. Механизм привода заслонок выполнен в виде гидроцилиндра 5 соединенного с вибратором 6.
Выгрузной 1инек 3 соединен с вертикальными 7 и наклонными 8 щнеками. Шнек 3 приводится во вращение от вала отбора мощности (не показан) через карданный вал 9 и цепную передачу 10. Передача движения с го1)изонтального пнека 3 на верти- кальн1 1Й 1пнек 7 осуществ, 1иется через конический редуктор 11, а с вертикального на нак,:1()нный 8 П1нек пос|)едством комплексного редуктора 12.
На передней и задней стенках бункера устан()(леныгидроцилиндры-вибраторы,
предназначенные для управления заслонками 4. Бункер 2 может содержать несколько секций. Количество 1 идроцилпндров-вибра- юров сосл ветствуег числу секций бункера 2. Один конец гидроци. 1индра-вибратора iiiap- нирно соединен со стенкой секции, а второйс рычагом 113 поворотной оси 14.
Оси 14 .закреплены в боковых стенках секций И)С)едством подп1ипников. Оси 14 через тяги 15 1парнирно соединены с заслонками 4. lllapHnpH(je соединение заслонок 4 с осью в верхней части перекрытой лентой 16.
К внутренними поверхносги зас. юнки 4 приварены ребра 17 для крепления тяги 15.
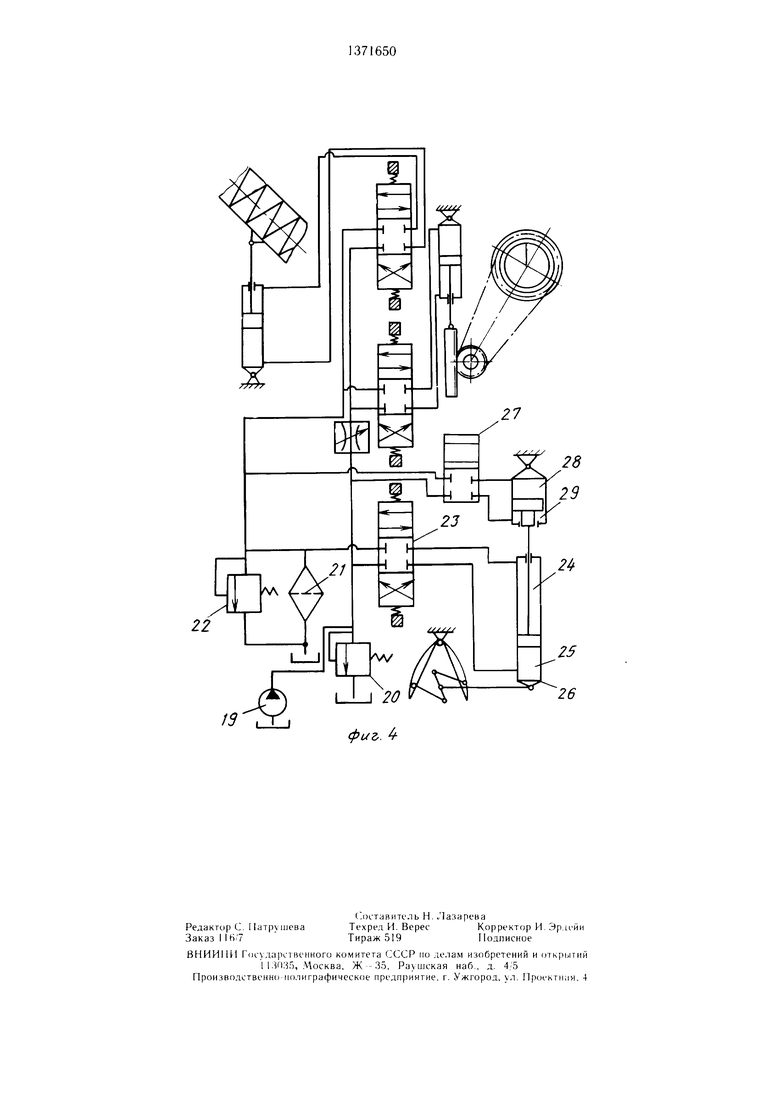
Свободные концы .часлонок 4 снабжены уплотнителями 18. На фиг. 4 представлена гидравлическая схема бункера 2. Насосная станция включает шестеренчатый насос 19, предохранительный клапан 20, фильтр 21 с пере, 1ивным клапаном 22 посредством трех- позиционного распреде,:1ителя 23 с электро- магнитньгм уп)авлением, щтоковая н бес- ппокован камеры соогветствепно 24 и 25 рабочего цилиндра 2(i гидроцплиндра-виб- рат())а соединены соответственно с насосной станцией. Через двухпозицнот1ый распределитель 27 с электромагнитным управлением вибрационные камеры 28 и 29 гидроцилиндра-вибратора соединены с насосной станцией. Количество распределителей типа 23 и 27 соответствует количеству секций бункера.
Распределитель 30 предназначен для подвода и отвода рабочей жидкости от гидроцилиндра 31 поворота вертикального 7 щне- ка. Для изменения угла наклона к горизонту наклонного в шнека установлен гидроци0 1индр 2.
Загрузчик работает следующим образом.
Загрузка сыпучего корма производится
через верхние загрузочные люки бункера 2,
закрываемые в транспортном положении
крышками. Перед загрузкой корма заслон кн 4 должны быть в разведенном состоянии, т. е. гидроцилиндры-вибраторы должны быть в крайних нижних положениях, а уплотнители 18 плотно прижаты к боковым стенкам секции (бункера 2).
QПосле доставки корма к месту выгрузки
оператор устанавливает выгрузное окно наклонного 8 шнека над местом складирования сыпучего корма. Затем сообщается вращение всему шнековому конвейеру. При этом корм в межвитковом пространстве го5 ризонтального выгрузного шнека 3 отсутствует и пусковой момент шнекового конвейера незначительный. Затем посредством гидроцилиндров 5 производится поворот заслонок 4 на необходимый угол. Между уплотнителями 18 и боковой стенкой секции образуется щель, через которую выгружаемый корм поступает в межвитковые пространства 1пнека 3. Затем вращающийся шнек 3 подает корм к вертикальному 1пнеку 7, а от него непосредственно к наклонному шнеку 8. В случае невозможности открытия заслонок (при плотно утрамбованном корме или промерзании) следуеп подвести рабочую жидкость с помопАью двухпозиционного распределителя 27 к вибрационной камере 28 и 29 и одновременно включить распределите0 -Tt M 23 подвод жидкости к рабочим камерам 24 и 25 гидроцилиндра. Создавая вибрации, легко можно осуществить открытие заслонок на необходимый угол, так как трение движения всегда меньше трения покоя. При зависании корма (образования сводов) в нагружаемой секции с помощью двухпозиционного распределителя 27 подается рабочая жидкость от насоса 19 в вибрационные камеры 28 и 29 гидроцилиндра вибратора. Наличие упругих резинометаллических шарниров в системе тяг и рычагов привода заслонок 4 обеспечит работу в около резо- нансовом режиме, что позволит быстро разрушить образовавшиеся своды. После завер- выгрузки корма из одной секции оператор выключает подачу рабочей жидкости
к вибрационным камерам гидроцилиндра- вибратора и подключает штоковую полость 24 к напорной магистрали системы. При этом рабочий цилиндр движется вверх и че0
5
5
0
рез систему.рычагов воздействует на заслонки 4, которые закрывают проходную щель в секции бункера. Таким образом поочередно производится выгрузка из всех . После окончания выгрузки или при необходимости произвести выгрузку корма в другом месте наклонный 8 шнек и вертикальный 7 шнек переводят из рабочего положения в транспортное.
Формула изобретения
Загрузчик сыпучих кормов, содержащий установленный на мобильной раме бункер с горизонтально размещенным в нижней его
; 8
4ЛДААА/ 7У ААА/У
wvvvvvx/vvv
F
у/ /// Y// //Y // //////////// /// // / У
6-6
i 9 10
Фиг.1
части выгрузным шнеком, средство регулирования степени заполнения межвитковог о пространства шнека, отличающийся тем, что, с целью повышения эксплуатационной надежности загрузчика путем предотвра- шения сводообразования, а также повын е- ния равномерности загрузки, средство регулирования выполнено в виде криволинейных заслонок, которые п арнирно ycтa foвлeны над шнеком с возможностью поворота в вертикальной плоскости посредством механизма привода, при этом заслонки обращены своей вогнутой поверхностью в сторону шнека, а механизм привода заслонок выполнен в виде гидроцилиндра, соединенного с вибратором.
//
6-6
фиг,. 4
27
29
| Бункер для сыпучих материалов | 1978 |
|
SU793875A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Загрузчик сухих кормов | 1982 |
|
SU1111709A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
