ф1/г.2
Изобретение относится к сельскохозяйственному производству и может быть использовано на животноводческих фе|1мах и комплексах для дозированной раздачи корма.
Цель изобретения рас1пирение функциональных возможностей кормораздатчика путем индивидуального дозирования кормов.
На фиг. 1 изображен кормораздатчик, вид сбоку; на фиг. 2разрез А А на
фиг. I; на фиг. 3 - функциональная схема управления кормораздатчиком.
Ко)мораздатчик состоит из замкнутой кормонесушей ленты 1. отк.юняюшей барабанов 2, передвижной те.чежки 3 и установ ленного на пей разгружаюшег о ролика 4, отк. юняюших ро.ликов 5, распределительною лотка (-1. делите.:я 7 потока, первого дозатора )S с заслонкой 9 и второго дозатора 10 с зас.1()нкой 11, KopMyiiJKH 12, неподвижных :(лементов 13 датчика фронта кормле- пия, количество которых равно числу пар животных, подвижного элемента 14 датчика 15 фронта кор.мления. установленного на передвижной те. 1ежке 3, первого блока 16 сравнения, блока 17 памяти, первого весового датчика 18 и второю весового датчика 19. соединепных с вторым блоком 20 сравнения, блока 21 унравления движением, те- .лежки 3. испо;|нительного .механизма 22 управления те. 1ежкой. исполнительною механизма 23 nepBoio весового дозатора 8. ис- по.чииle. ibHoro механизма 24 второго весового дозатора 10. испо.1нительного механизма 25 нанравлякице о лсггка 6 делнте- . 1Я 7 потока.
Кормораздатчик работает следующим об|ul3OM.
В нача.1е процесса ра.здачи корма тележка на.чодится в пределах ф1)он1а кормления первой пиры животны.ч. неподвижный :1.1емепт 13 и подвижный i:ieMe)iT 14 датчика 15 ф1)ои1а корм.тения совмещены, а ин(}|())мация об индивидуальной норме корма (анесени и б.;1ок 17 памяти.
При вк.1К)чении ко|1мораздатчика в работу .тента 1 доставляет поток корма к раз- грузочномч ро.тику 4. Корм, двигаясь по рас- предели1ел1,ном лотку (J де.штеля 7 потока, попадаег в нервый весовой дозатор 8 и (апо.тняет его до те.х пор. пока второй блок 20 сра1 пепия не подаст сиша.т на включение нс11о.11ите.ты1ого механизма 26 де.тите.,тя 7 потоки, который поворачивает распреде.тп- re.ibHbiii л()Т(к f) и направляет к(.)рм во вто- )ой до.(ат()) К).
N прав.тяющий сигна.т на выходе второго б. юки 20 с1)авиепия нояв.чяется то.тько пос.те тою, как станет )авной IU.TKI )а.зность сигналов нормы корма и его дейсгвите.тьной массы, пост у naKiHULX на вход того б. юка со- отвегсгвеино со сгоропы 6. i(jKa памяти 17 и шч овых датчиков 18 или 19.
Kl)oMe испо.тни ге.ипюго мехинн.зма 25, сигнал пз блика 20 сра пения поступает на
0
исполнительный механизм 23 первого дозатора, заслонка 9 которого открывается и корм выгружается в кормушку, на исполнительный механизм 24 второго дозатора 10, за- слонка 11 которого поворачивается и обеспечивает прием второй порции корма, на первый блок 16 сравнения. При этом скорость тележки 3 равна нулю, так как запрет на ее движение продолжает действовать. После заполнения второго дозатора 10 снова появляется управляющий сигнал на выходе второго блока 20 сравнения, который поступает на исполнительные механизмы 23-25, а также в первый блок 16 сравнения и в блок 21 управ5 ления движением тележки 3. 11ри этом заслонка 9 первого дозатора 8 поворачивается и подготавливает его к приему следующей порции корма, распределительный лоток 6 делителя 7 возвращается в исходное положение и направляет поток корма в пер0 вый дозатор 8, блок 21 управления движением тележки 3 подает сигнал на исполнительный механизм 22 управления тележки 3. и она начинает движение.
При движении те.чежки 3 от одного не5 подвижного элемента датчика фронта кормления к последующему неподвижному элементу датчика фронта кормления процесс раздачи корма происходит аналогично. Если при этом установленная норма корма не поступит хотя бы в один из дозаторов 8 или 10,
0 то при достижепии тележкой 3 последующего неподвижного элемента датчика 15 ф)онта К(.)рмления блок 21 управления движения те.чежки 3 подает управляющий сигнал на исно.чнительный .механизм 22 управ- .чения движением тележки 3. которая остано5 вится и будет сгоять до тех пор, пока (j6a дозатора 8 и 10 не выдадут установ.чеп- пук.) H(jpMy корма живсотным. -)т() приведег к снятию .зап)ета с блока 21 унрав.тения движением тележки 3. На пcн(J..тьный механизм 22 ноступит упраи.чян)пип1 CHI на.i и те.чежка 3 начнег с jia 1дич1.ч1 корма.
После заверп1ения раздачи корма .4eiria 1 кормораздатчика останавливается, а тележка 3 возвращаечся в исходное положение.
0
45
Формули u:i(nfi( гения
Кормораздатчик, содгржап1ий продоль- Hbn i кормораздающий трапс11(.)ртер с бескс.)- нечной кормонесун1ей лентой, по обе стороны которых расположены кормовые места, те.чежку. установленную па нанравляюпитх, расположенных под несущей частью кормо- несущей ленть. че.чежка снабжена кормоза- даюпщм блоком, делиге.тем потока с направляющими лотками, разгружающим и отклоняющими ро.чнка.ми. огибаемыми кормо- несущей .чентой. причем очклоняк)пи1Й ролик устапов.чен по направлению рабочегч) хода те.тежки и распо.1ожен под горловиной кормора: даю|цего блока, блок управ. И ния приводом кормораздаюшего транспо ггера, отличающийся тем, что, с целью laciiinpeiiHH функциональных возможностей путем индивидуального дозирования кормов, он снабжен датчиками фронта кормления, каждый из которых размещен у соответствующего кормового места, датчиком положения тележки, блоком управления движением с приводом тележки, распределительным лотком, размещенным под горловиной кормораздаю- шего блока и двумя весовыми дозаторами, каждый из которых расположен в соответствующем направляющем лотке и включает весовой датчик и исполнительный механизм, а так же снабжен блоком дозирования кор0
ма, выпо. шенным н виде п()следов;пчмьн( соединенных первого блока сравнения, блока памяти и второго блока сравнения, а также иснолнительного механизма регулирования положением распреде,:1ите.:1ьного лотка, причем весовые датчики подключепы к соответствующим входам второго блока cfiaB- пепия, выход которого связан с входами б, И)- ка управления движением тележки, испо, |- нительных механизмов обоих дозаторов, исполнительным механизмом регулирования положением распределительного лотка и первым входом первого блока сравнения, к второму входу которого и к второму входу блока управления движением тележки подключены датчики фронта кормления.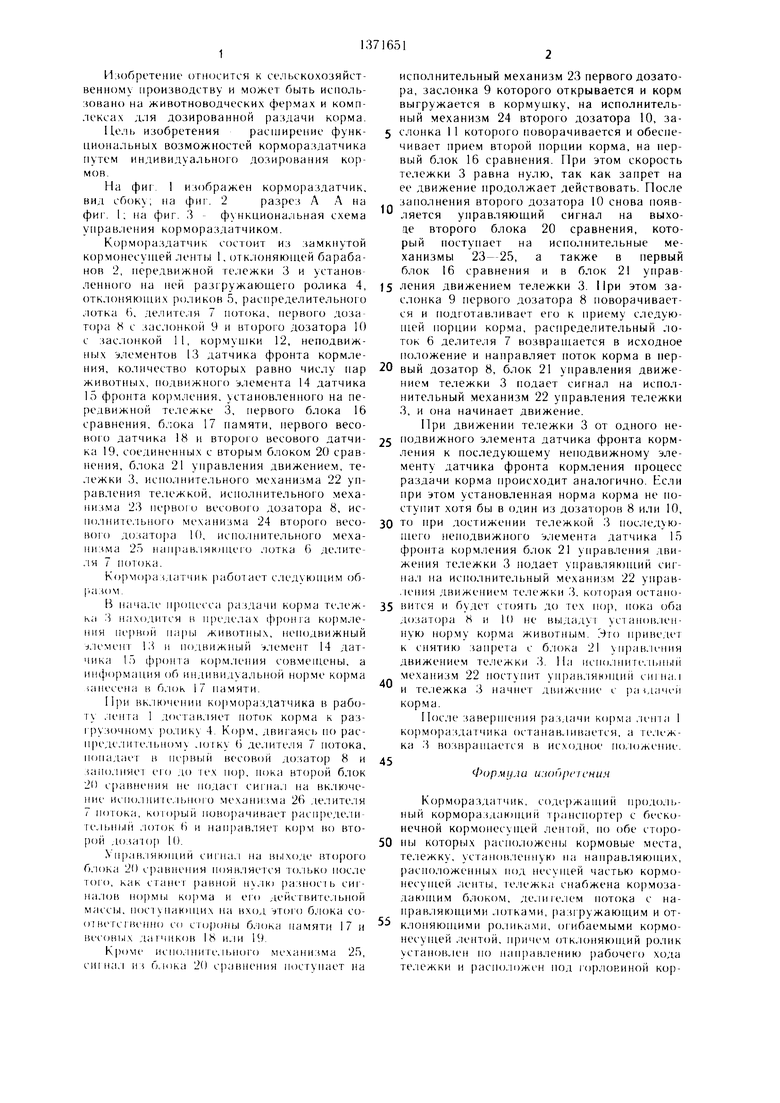
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОВОЙ ПОРЦИОННЫЙ РАЗДАТЧИК КОРМОВ | 1999 |
|
RU2165692C2 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Линия для раздачи корма рыбам в рыбоводных водоемах | 1981 |
|
SU1050620A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| Кормораздатчик | 1987 |
|
SU1516072A1 |
| Устройство для кормления телят в помещениях с двухрядным расположением стойл | 1975 |
|
SU606568A1 |
| УСТРОЙСТВО ДЛЯ РАЗДАЧИ КОРМА | 1991 |
|
RU2009639C1 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ КОРМЛЕНИЯ ВОДНЫХ ЖИВОТНЫХ СУХИМ КОРМОМ | 2021 |
|
RU2770667C1 |

Изобретение относится к сельскохозяйственному производству и может быть использовано на животноводческих фермах и комплексах с дозированной раздачей корма. Целью изобретения является распшре- ние функциональных возможностей кормораздатчика путем индивидуального дозирования кормов. Корм, дви|-аясь по распределительному лотку 6 делителя потока 7, попадает в первый весовой дозатор 8 и допо.1- няет его до тех пор, пока второй блок сравнения не подает сигнал на включение исполнительного механизма делителя потока 7. Распределительный лоток 6 поворачивается и направляет корм во второй дозатор 10. Управляющий сигнал на выходе второго блока (равнения поступает на исно,1ните, 1ьны11 механизм первого дозатора 8, заслонка 9 которого открывается и корм выгружается в кормун1ку 12. После за11(),1нення дозатора 10 заслонка 9 нервого дозатора 8 новорачн- вается и подготавливает eio к приему следующей порции корма. распределите,1Ь- ный лоток 6 делителя иччжа 7 возвращается в исходное по.южение и направляет корм в дозатор 8. 3 и, |. //-// (Л со О5 сл
//г/
| Установка для раздачи кормов | 1984 |
|
SU1162390A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
