7
ff
8
5, 7.
6, 8
44 LzLi
Ж2/1
у
/
У
Ч
/
/ /
О)
7-7
й
Фиь. /
Изобретение относится к электротехнике и предназначено для контроля положения различных производственных механизмов.
Целью изобретения является повышение чувствительности бесконтактного переключателя и расширение области его применения.
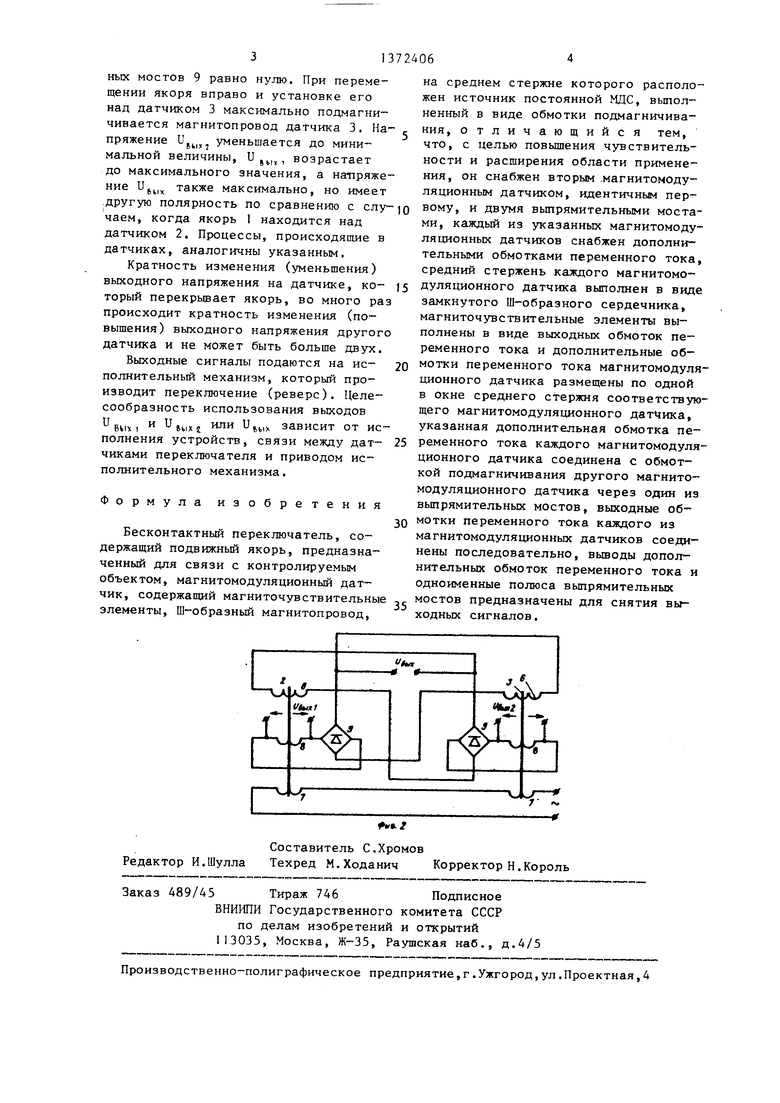
На фиг,1 изображен переключатель, продольный разрез; на фиг.2 - схема включения обмоток переключателя.
Бесконтактный переключатель состоит из подвижного якоря 1 и двух датчиков 2 и 3. Каждый датчик представля ет собой Ш-образный магнитопровод со средним стержнем 4 и крайними стержнями 5, На среднем стержне 4 размещена обмотка 6 подмагничивания, Средний стержень 4 выполнен в виде замк- нутого Ш-образного сердечника, в окне которого размещены магниточувствитель ный элемент, выполненный в виде выходной обмотки 7, и дополнительная выходная обмотка 8, Обмотки 7 и 8 включены согласно, В каждом датчике магнитопровод для обмотки 6 разомкнут, а для обмоток 7 и 8 замкнут,Обмотки 7 датчиков 2 и 3 включены между собой последовательно, Дополнитель- ная выходная обмотка датчика 2 через выпрямительный мост 9 соединена последовательно с подмагничивающей обмоткой 6 датчика 3, а дополнительная обмотка 8 датчика 3 через выпрямительный мост 9 - последовательно с подмагничивающей обмоткой 6 датчика 2, т,е, обмотки 8 являются источниками питания подмагничивающих обмоток, К путевому переключателю подво
дится переменное напряжение,
Выходные с обмосигналы и,,,„ и и , „„ снимаются
hW.Jt 1
ток 8 обоих датчиков. Выходной сигнал и
БЬ1
может сниматься с одноименных полюсов выпрямительных мостов 9, Магнитные и электрические параметры датчиков 3 и 2 одинаковые.
Переключатель работает следующим образом.
Когда якорь 1, связанный с перемещающимся объектом, находится вне зоны взаимодействия с датчиками, то при подаче питания на устройство напряжения на обмотках 7 датчиков 2 и 3 равны между собой, поэтому подмаг- ничивающие обмотки 6 датчиков 2 и 3 обтекаются одинаковым током. Так как магнитопроводы в датчиках для обмоток 6 разомкнуты, то подмагничивание
62
средних стержней 4 с обмотками 7 и 8 в равной мере происходит за счет потоков рассеяния. Вследствие идентичности параметров датчиков 2 и 3 выходные напряжения Ug,, ,и и,,, , снимаемые с обмоток 8, равны между собой, а выходное напряжение, снимаемое с плюсовых зажимов вьтрямителей 9, равно нулю,
При перемещении якоря влево и установке его над датчиком 2 магнитная цепь для обмотки 6 замыкается через якорь I, постоянный магнитный поток обмотки 6 увеличивается, вследствие чего подмагничивание обмоток 7 и 8 в датчике 2 возрастает. Индуктивность обмотки 7 датчика 2 уменьшает
ся, поэтому напряжение на ней также снижается, а напряжение на обмотке 7 датчика 3 возрастает. Напряжение на обмотке 8 датчика 2 уменьшается, а на обмотке 8 датчика 3 увеличивается, что приводит к увеличению тока обмотки 6 датчика 2 и уменьшению тока обмотки 6 датчика 3, т,е, к дополнительному подмагничиванию датчика 2 и ослаблению подмагничивания датчика 3, В результате индуктивность обмоток 7 и 8 датчика 2 уменьшается, а напряжение на обмотках 7 и 8 датчика 3 увеличивается. Это приводит к увеличению тока обмотки в датчике 2 и повышению подмагничивания обмоток 7 и 8 датчика 2, уменьшению подмагни- чивающего тока обмотки 6 датчика 3 и повьштению напряжения на обмотках 7 и 8 датчика.3, Так происходит до наступления установившегося режима, когда индуктивность обмоток 7 и 8 датчика 2 близка к нулю. Напряжение
5
0
5
и
64 1
на датчике 2 минимально (почти равно нулю), а напряжение U j, на датчике 3 максимально, На выходе одноименных полюсов выпрямительных мостов должно появиться максимальное постоянное напряжение U g, определенной полярности.
Таким образом, с момента установки якоря над датчиком 2 до момента схода якоря с него напряжение ,, минимально (близко к нулю), а напряжение и jbi 7 максимально, максимальное значение имеет в это время и напряжение Ug,,,
После перемещения якоря 1 с датчика 2 напряжения на обмотках 8 выравниваются между собой, а напряжение
и
1и , снимаемое с полюсов выпрямитель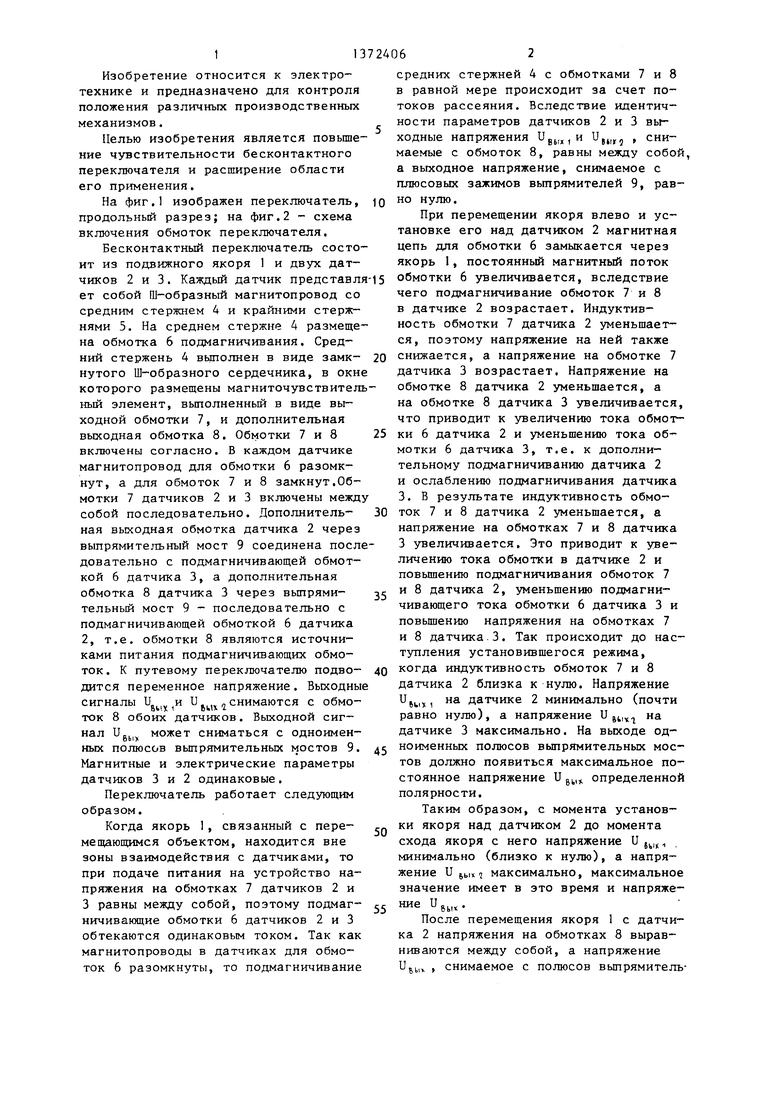
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения разности давлений | 1982 |
|
SU1064172A1 |
| Устройство для контроля и измерения конечных перемещений поршня домкрата | 1986 |
|
SU1409757A1 |
| Устройство для контроля и измерения конечных перемещений поршня домкрата горной машины | 1986 |
|
SU1416704A1 |
| Устройство для защиты от перегрузки электродвигателя постоянного тока | 1980 |
|
SU951541A1 |
| Индуктивный датчик перемещений | 1979 |
|
SU870921A1 |
| Комбинированный блок питания | 1979 |
|
SU905807A1 |
| Стабилизированный блок питания током | 1981 |
|
SU1026134A1 |
| Индуктивный датчик положения | 1980 |
|
SU881525A1 |
| Электропривод возвратно-поступательного движения | 1984 |
|
SU1327243A1 |
| Трехфазный умножитель частоты | 1982 |
|
SU1072211A1 |
Изобретение относится к области электротехники и может быть использовано для контроля положения различных механизмов. Цель изобретения - повьтение чувствительности и расширение области применения. Бесконтактный переключатель состоит из подвижного якоря I и магнитомодуляционных датчиков (МД) 2 и 3, на средних стержнях 4 которых размещены обмотки 6подмагничивания, выходные обмотки 7и дополнительные обмотки 8. Выходные сигналы снимаются с обмоток 8 обоих МД. Когда якорь 1 находится вне зоны взаимодействия с МД, выходные сигналы, снимаемые с обмоток В, равны между собой. При установке якоря над одним из МД выходной сигнал, снимаемый с этого МД, минимален, а сигнал, снимаемый с второго МД, максимален. 2 ил. с (Л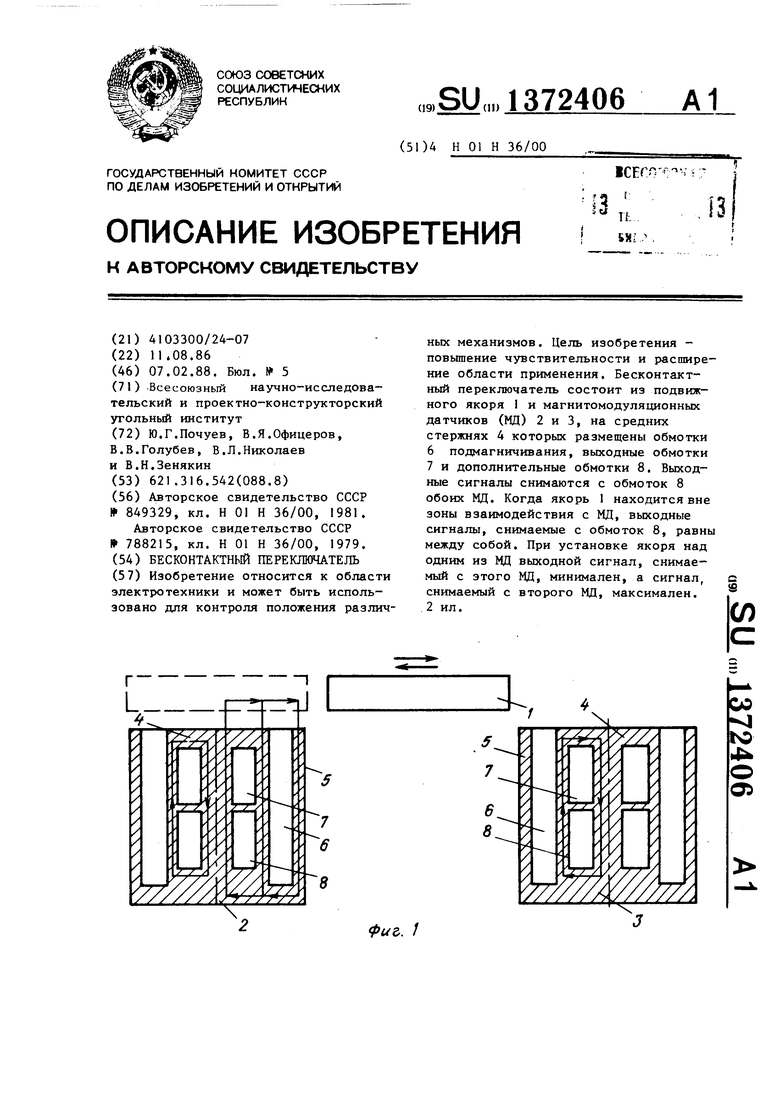
| Путевой выключатель | 1979 |
|
SU849329A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесконтактный переключатель | 1979 |
|
SU788215A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
