(со t со )
(1)
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
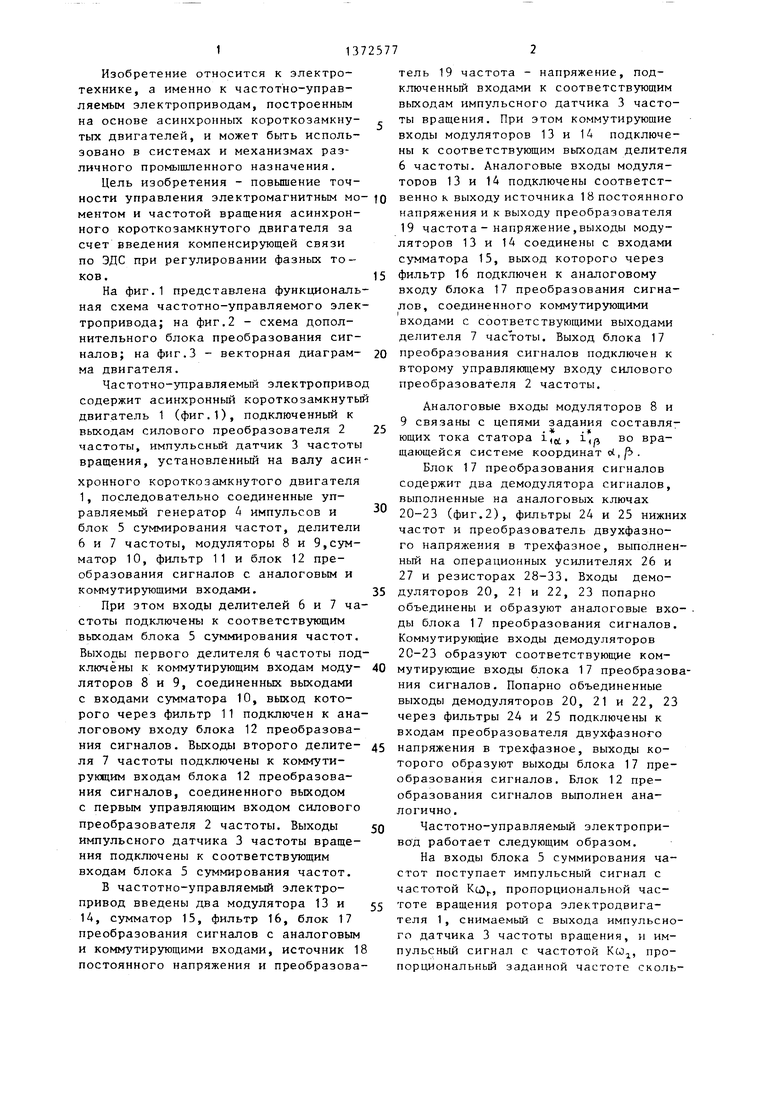
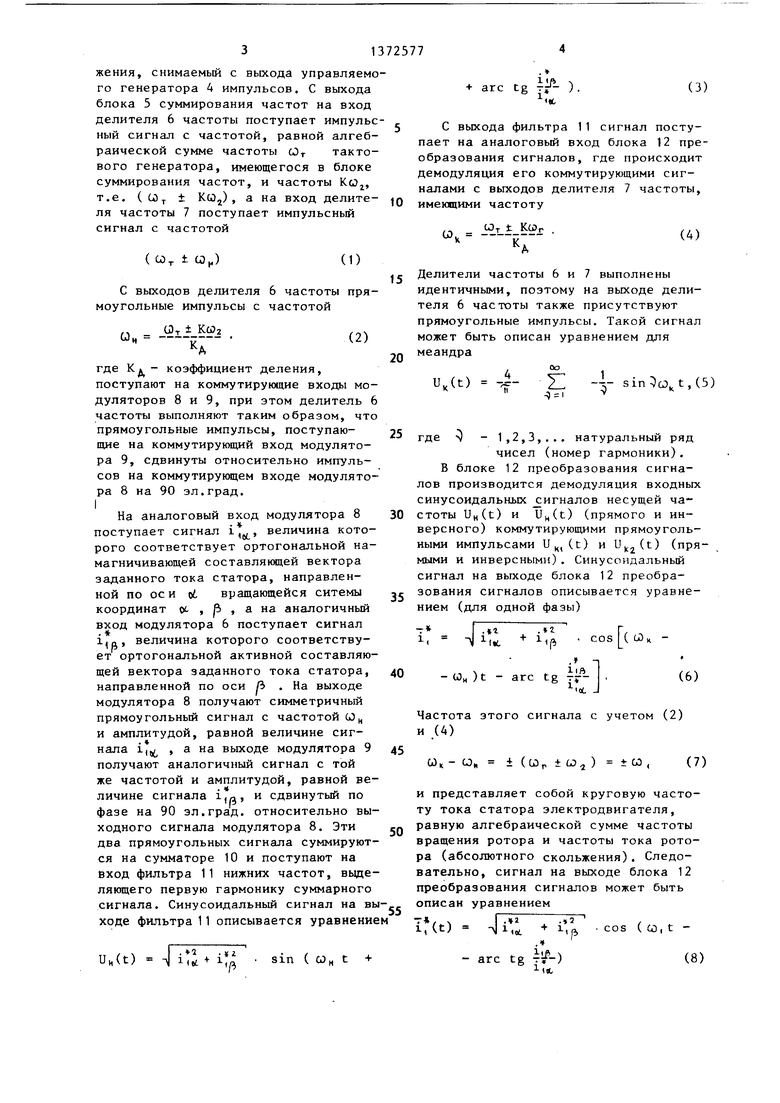
Изобретение относится к электротехнике и может быть использовано в системах и механизмах различного промьшленного назначения. Целью изо- бретбния является повышение точности управления электромагнитным моментом и частотой вращения асинхронного короткозамкнутого двигатели за счет введения компенсирующей связи по ЭДС при регулировании фазных токов. Указанная цель достигается введением в частотно-управляемьп электропривод модуляторов (М) 13, 14, сумматора 15, фильтра 16, блока 17 преобразования сигналов, источника 18 постоянного напряжения и преобразователя 19 частота - напряжение. Указанные блоки предназначены для формирования си -налов компенсации ЭДС, при этом коммутирующие входы М 13, 14 связаны с коммутирующими входами М 8, 9, а коммутирующие входы блока 17 - с коммутирующими входами блока 12 преобразования сигналов. Выходы блоков 12, 17 соединены с управляющими входами преобразователя частоты 2 асинхронного двигателя 1 . Введение компенсирующих сигналов ЭДС А а t закон регулирования асинхронного двигателя 1 позволяет повысить точность регулирования фазных токов . 3 ил. (Л со ts9 сл --;ЗГ
С выходов делителя 6 частоты прямоугольные импульсы с частотой
.. QT ± КоЗг
UH-
К,
(2)
где Кд - коэффициент деления, поступают на коммутирующие входы модуляторов 8 и 9, при этом делитель 6 частоты выполняют таким образом, что прямоугольные импульсы, поступаю- щие на коммутирующий вход модулятора 9, сдвинуты относительно импульсов на коммутирующем входе модулятора 8 на 90 эл.град.
На аналоговый вход модулятора 8 поступает сигнал i, величина которого соответствует ортогональной намагничивающей составляющей вектора заданного тока статора, направленной по ос и об вращающейся ситемы координат ot , |5 , а на аналогичный вход модулятора 6 поступает сигнал i,n, величина которого соответствует ортогональной активной составляющей вектора заданного тока статора, направленной по оси /3 . На выходе модулятора 8 получают симметричный прямоугольный сигнал с частотой СО и амплитудой, равной величине сигнала i, , а на выходе модулятора 9 получают аналогичный сигнал с той же частотой и амплитудой, равной величине сигнала i,Q, и сдвинутый по фазе на 90 зл.град. относительно выходного сигнала модулятора 8. Эти два прямоугольных сигнала суммируются на сумматоре 10 и поступают на вход фильтра 11 нижних частот, выделяющего первую гармонику суммарного сигнала. Синусоидальный сигнал на вы
ходе фильтра 11 описывается уравнением
IT
a .z
«i tA
sin ( со„ t +
Делители частоты 6 и 7 выполнены идентичными, поэтому на выходе делителя 6 частоты также присутствуют прямоугольные импульсы. Такой сигнал может быть описан уравнением для меандра
л 1 UK) -|- Z. sin:),(5)
где - 1,2,3,... натуральный ряд
чисел (номер гармоники). В блоке 12 преобразования сигналов производится демодуляция входных синусоидальных сигналов несущей частоты ) и иц(с) (прямого и инверсного) коммутирующими прямоугольными импульсами и,, (t) и U,j(t) (прямыми и инверсными). Синусоидальньй сигнал на выходе блока 12 преобразования сигналов описывается уравнением (для одной фазы)
i
г
(«С
.г 1ф
cos
Ы„ - и„ )t - arc tg
ifoTJ
(6)
Частота этого сигнала с учетом (2) и (4)
ОЗк-СОц ±(COp±CO,j) tCO,(7)
и представляет собой круговую частоту тока статора электродвигателя, равную алгебраической сумме частоты вращения ротора и частоты тока ротора (абсолютного скольжения). Следовательно, сигнал на выходе блока 12 преобразования сигналов может быть описан уравнением
ifct) -JT
.2
. ifi COS ( CO, t - arc tg
i)
(,
(8)
или в комплексной форме
- . 1. 1
13725776
представляет собой ЭДС электродвигателя, которую можно представить в
ч«.
+
(9)
виде
Таким образом, с помощью блока 5 суммирования частот, делителей 6 и 7 частоты, модуляторов 8 и 9, сумматора 10, фильтра 11 и блока 12 преобразования сигналов производится преоб- разование сигналов ортогональных составляющих заданного обобщенного вектора тока статора из неподвижной системы координат во вращающуюся с частотой со. систему координат. По сигналу i| на выходе блока 12 преобразования сигналов получают трехфазную систему синусоидальных напряжений, поступающую на первый управляющий вход преобразователя 2 частоты.
Формирование сигналов для компенсации ЭДС электродвигателя производится исходя из уравнения статорной цепи асинхронного электродвигателя, записанного в обобщенных векторах в системе координат, вращающейся с произвольной частотой со :
di
R,T, --- - R,i, + JR,T, (О i,
dt
+ ,(72- -V ;
(10)
эквивалентные активное сопротивление и постоянная времени статорной
цепи;
обобщенные векторы напряжения статора, тока статора и потокосцепле- ния ротора;
-коэффициент связи ротора;
-индуктивности цепей намагничивания и ротора;
круговая частота вращения ротора.
ие можно также записать ввде:
и,
..-.-- dt
R,i,
+ JR.T, о i, +
(11)
-
где
- . Т,
+ jK COrCi,, (12)
виде
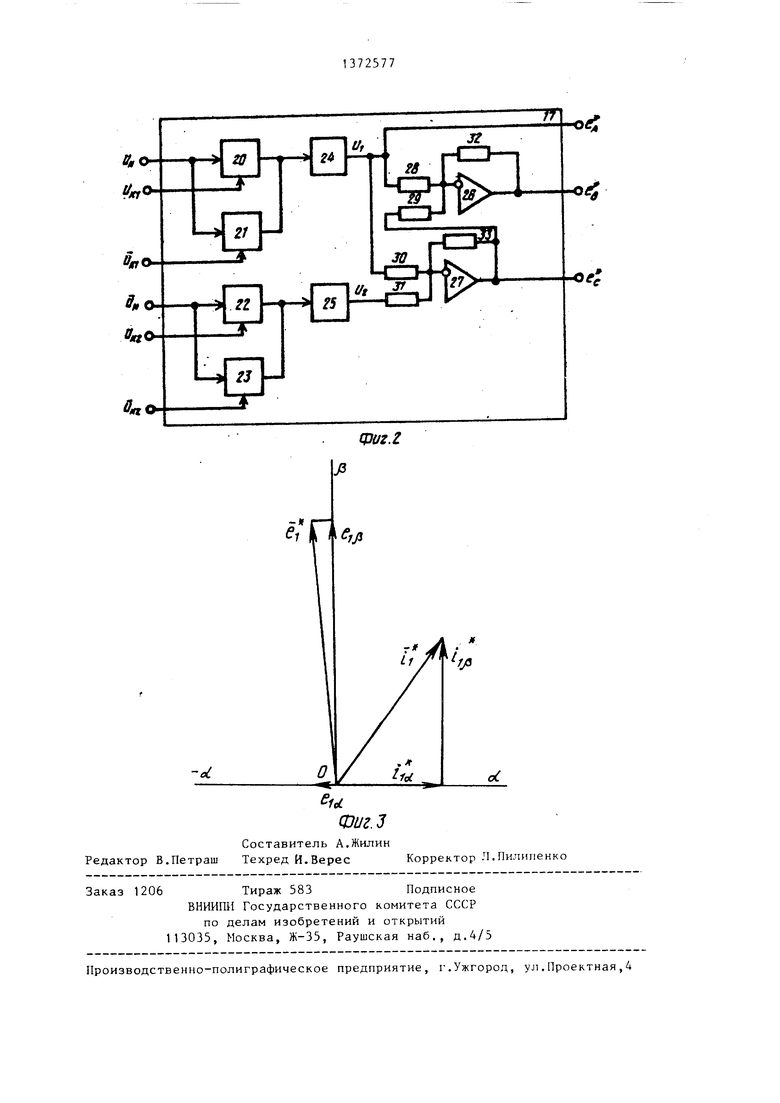
ё, е, + jeip , если принято, что
(13)
IftL
-|-:(14)
е,р, .t.,,
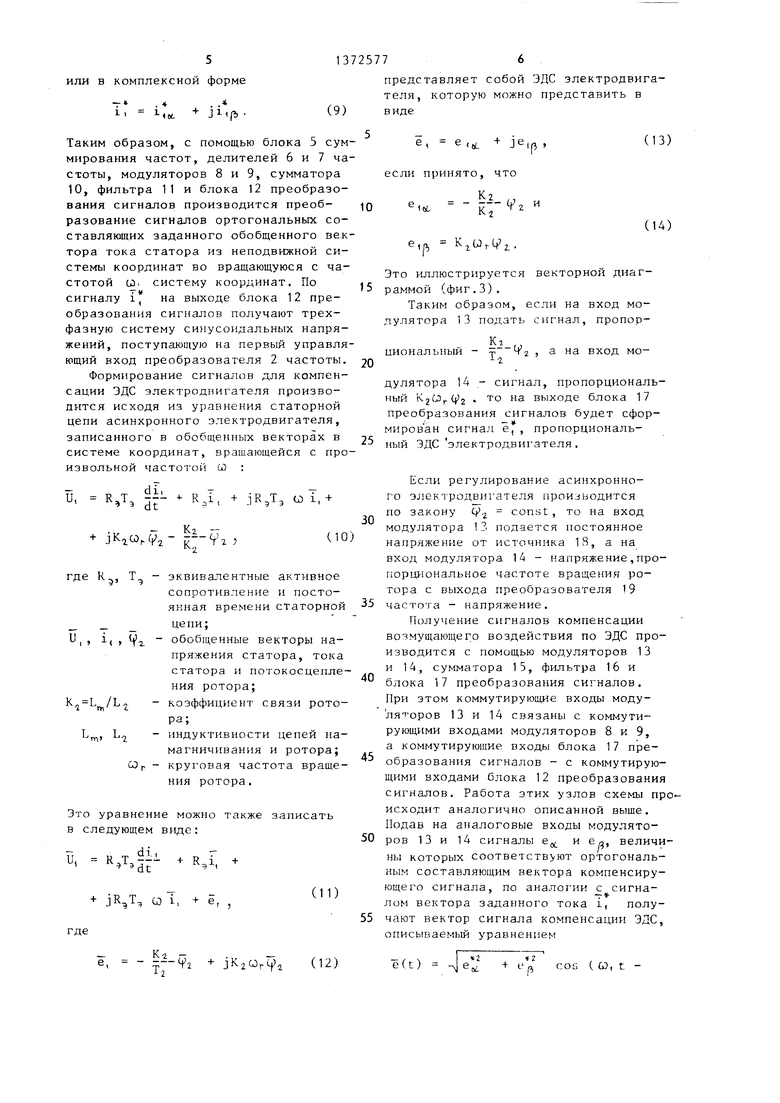
Это иллюстрируется векторной диаг- раммой (фиг.З).
Таким образом, если на вход модулятора 13 подать сигнал, пропорKi ,, циональный - ) а на вход мо -г
дулятора 14 - сигнал, пропорциональный К2СОг 2 выходе блока 17 преобразования сигналов будет сфор- миров ан сигнал ё, , пропорциональ- ный ЭДС электродвигателя.
0
5
0
5
Если регулирование асинхронного электродвигателя производится по закону (2 const, то на вход
модулятора 13 подается постоянное напряжение от источника 18, а на вход модулятора 14 - напряжение,пропорциональное частоте вращения ротора с выхода преобразователя 19 частота - напряжение.
Получение сигналов компенсации возмущающего воздействия по ЭДС производится с помощью модуляторов 13 и 14, сумматора 15, фильтра 16 и блока 17 преобразования сигналов. При этом коммутирующие входы модуляторов 13 и 14 связаны с коммутирующими входами модуляторов 8 и 9, а коммутирующие входы блока 17 преобразования сигналов - с коммутирующими входами блока 12 преобразования сигналов. Работа этих узлов схемы происходит аналогично описанной выше. Подав на аналоговые входы модулято- 0 ров 13 и 14 сигналы е и е f, величины которых соответствуют ортогональным составляющим вектора компенсирующего сигнала, по аналот ии с сигналом вектора заданного тока i.
полу55 чают вектор сигнала компенсации ЭДС, описываемый уравнением
-Jel + е
2 P
C.Oi
( CO, t - arc tg
7 4)
Wили в комплексной форме ё ЕО - Je/ ;
т.е. сигнал компенсации ЭДС получают в той же системе координат, что и вектор заданного тока. Далее на выходе блока 17 преобразования сигналов
получают трехфазную систему компен-
- #
А
8
сирующих сигналов ЭДС е поступающую на второй управляющи вход преобразователя 2 частоты.
Введение компенсирующих сигналов ЭДС позволяет повысить точность регулирования фазных токов, благодаря чему повышается точность управления злектромагнитным моментом и частотой
вращения асинхронного короткозамкну- того двигателя в сравнении с известным решением.
Формула изобретения
Частотно-управляемь й электропривод, содержащий асинхронный корот- козамкнутый двигатель, подключенный к выходам силового преобразователя частоты, импульсный датчик частоты вращения с двумя выходами, установленный на валу асинхронного коротко- замкнутого двигателя, последовательно соединенные управляемый генератор импульсов и блок суммирования частот два делителя частоты, два модулятора сумматор, фильтр и блок преобразования сигналов с аналоговым и коммутирующим входами, при этом входы делителей частоты подключены к соот- ветствукицим выходам блока суммирования частот, выходы первого делителя частоты подключены к коммутирующим входам соответствующих модуляторов, соединенных выходами с входами
1372577
)
10
, ,
15
20
25
30
35
40
45
сумматора, выход которого через фильтр подключен к аналоговому входу блока преобразования сигналов, выходы второго делителя частоты подключены к коммутирующим входам блока преобразования сигналов,соединенного выходом с первым управляющим входом силового преобразователя частоты, выходы импульсного датчика частоты вращения подключены к соответствующим входам блока суммирования частот, отличающийся тем, что, с целью повышения точности управления за счет введения компенсирующей связи по ЭДС при регулировании фазных токов, введены два дополнительных модулятора, дополнительный сумматор, дополнительный фильтр, дополнительный блок преобразования сигналов с аналоговым и коммутирующими входами, источник постоянного напряжения и преобразователь частота - напряжение, подключенный входами к соответствующим выходам импульсного датчика частоты вращения, при этом коммутирующие входы дополнительных модуляторов подключены к соответствующим выходам первого делителя частоты, аналоговые входы первого и второго дополнительных модуляторов подключены соответственно к выходу источника постоянного напряжения и к выходу преобразователя частота - напряжения, выходы дополнительных модуляторов соединены с входами дополнительного сумматора, выход которого через дополнительный фильтр подключен к аналоговому входу дополнительного блока преобразования сигналов, соединенного коммутирующими входами с соответствующими выходами второго делителя частоты, а выход дополнительного блока преобразования сигналов подключен к второму управляющему входу силового преобразователя частоты.
On 9
- Ш
1 А f /yj
Фиг.г
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
