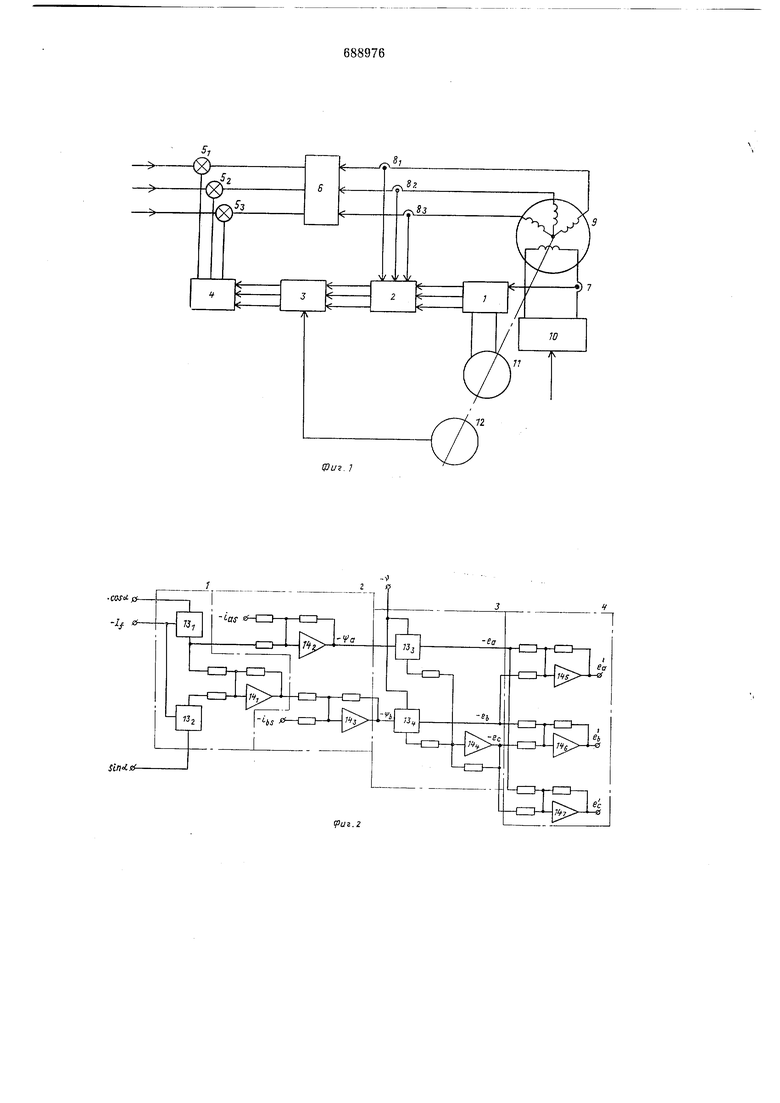
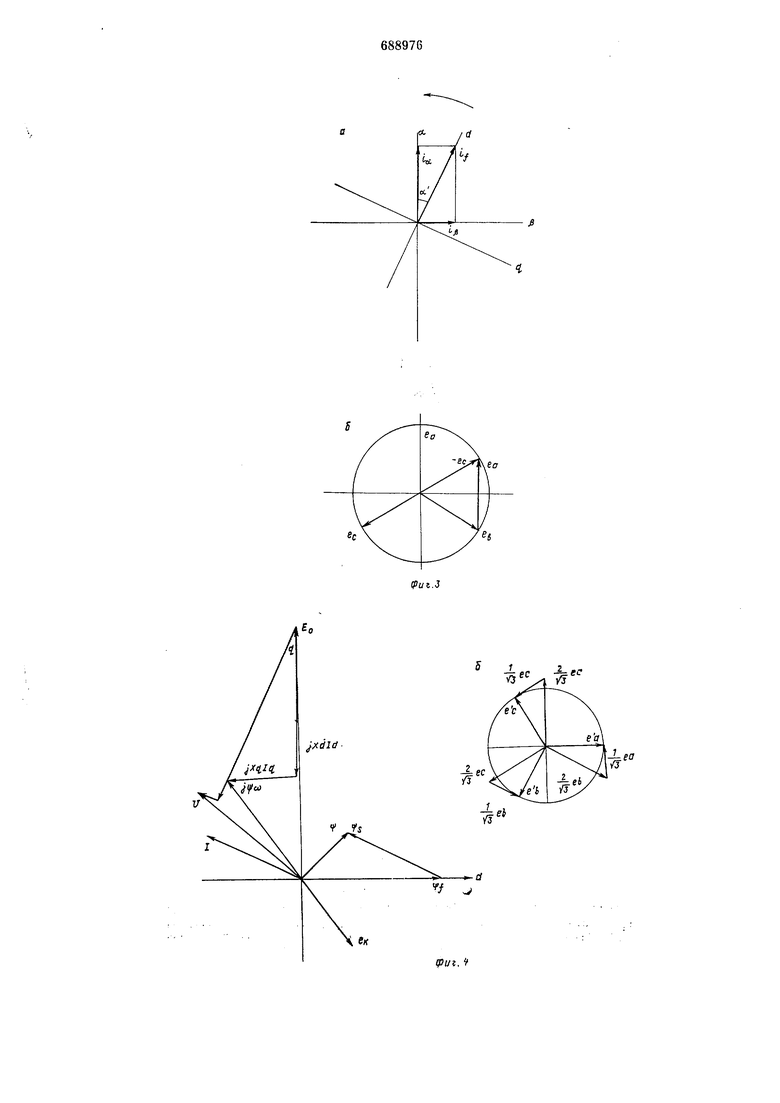
схему управления преобразователем частоты. Однако применение этого компенсатора в регуляторе с регулированием по полному току требует подачи на вход узла компенсации токов Статора, преобразованных к осям d и q. . Регулятор с регулированием полного тока такого преобразования пе имеет. Кроме того, выход компенсатора имеет напряжение в осях d 1} д, а для регулятора по полиому току требуется сигнал, компенсирующий ЭДС двигателя в трехфазных величинах. Поэтому для регуляторов с регулированием полного тока необходима разработка ирииципиальио нового компеисатора ЭДС вращеиня, обеспечивающего нормальную работу электропривода и высокое качество регулирования. Целью изобретения является повыщение качества регулирования скорости при рег}лировании полного тока статора в синхронном частотно-управляемом электроприводе. Поставленная цель достигается за счет того, что в устройств1§ введен блок обратного преобразования координат с однофазным входом, соединеиным с блоком суммирования, и входами для гармонических функций, соединенными с датчиком положения, при этом датчики токов статора соединены непосредственно с соответствующими входами блока суммирования, а блок поворота векторов - с соответствующим входом управления преобразователя частоты. На фиг. 1 изображена структурная схема устройства для компенсации ЭДС; на фиг. 2 - принципиальная схема устройства; на фиг. 3,а - векторная диаграмма перехода из осей d и q к осям а и Р; на фиг. 3,6 - векторная диаграмма вычисления вс по известным ва и еь, на фиг. 4,а - векторная диаграмма синхронного двигателя; на фиг. 4,6 - векторная диаграмма, поясняющая работу узла поворота векторов на 90 эл. град. На чертежах приняты следующие обозначения: 1 - преобразователь координат; 2 - суммирующее устройство; 3 - определитель величины амплитуды; 4 - узел поворота векторов; 5i-63 - суммирующие устройства; 6 - тиристорный преобразователь частоты; 7 - датчик тока в цепи возбуждения двигателя; 8i-83 - датчики тока в статорной цепи; 9 - синхронный двигатель; 10 - тиристорный возбудитель; И - датчик положения; 12 - тахогенератор; 13i-184 - множительные устройства; 14i-14 - операционные усилители; cos а, sin а - угловые положения ротора относительно статора синхронного двигателя; if - ток возбуждения синхронного двигателя; las, ibs - ток статора фазы А и фазы В; фа ь - суммарный поток фазы А и В; Sa, еь, вс - величина ЭДС; совиадающая по напряжению с суммарным ПОТОКОМ; еа, еь, е с - векторная величина компенсируюи ей ЭДС; аир - две взаимно перпендикулярные оси координат, причем ось а совпадает по напряжению € фазой Л; а - угол между осью а и осью d; d, q - две перпендикулярные оси, причем ось d совпадает с продольной осью ротора; Ей - ЭДС холостого хода синхронного двигателя; х, Хд- индуктивные сопротивления по продольной и.поперечной осям; a|j/ - потокосцепление обмотки возбул дения; - потокосцепление статора; ij) - суммарное потокосцепление; со - скорость двигателя; Id, Ig - продольная и поперечная составляющие тока статора; / - ток якоря двигателя; U - приложенное напряжение; е - ЭДС компенсации. Устройство для компенсации ЭДС состоит из суммирующего устройства 2, которое одновременно является и координатным преобразователем, преобразующим сигналы с датчиков тока статора 8i-83 в потоки статора, узла координатного преобразователя 1, определителя величины амплитуды 3, узла поворота векторов 4, сигналы с которого поступают на суммирующий вход тиристорного преобразователя частоты. Определение тока возбуждения осуществляется датчиком 7 скорости (тахогенератором), положение ротора - датчиком положения. Датчики тока, положения и скорости установлены не специально для устройства компенсации ЭДС, а являются необходимыми элементами регулятора полного тока. Узел координатного преобразователя выполнен на двух множительных устройствах. На вход его подается ток с датчика тока возбуждения 7 косинус и синус угла между статорным и роторным потоками синхронного двигателя. На выходе получаем ток возбуждения, приведенный к трехфазной системе статора. Поток возбуждения пропорционален току возбуждения. Множители 13i и 132 (фиг. 2) производят приведение осей координат d и q, связанных с ротором, к координатам осей статора а и -Р по следующим формулам: -JJ. ф/С08а; ФЗ :t;cSina. Усилитель 142 осуществляет дальнейщий переход к трехфазным осям по следующим зависимостям: Фа фа ; 1УТ б - 1ос-Ь- Р Поток фазы С этим узлом не формируется, так как дальнейщие преобразования осуП1,ествляются только с использованием фаз А II В. Преобразование токов статора в потоки статора и сложение потоков статора и ротора осуществляется суммирующим уст1)ойством 2.
Эти операции осуществляются усилителями 142 и 14з (см. фиг. 2) в соответствии со следующими зависимостями:
. ias + af, ibs - bfгде ias, ibs - токи фаз статора;
X - индуктивное сопротивление
фазы статора;
af, фь; - ПОТОК возбуждения, приведенный к статору (фазы А н В соответственно).
Определитель величины амплитуды 3 производит операцию умножения потока зазора и скорости вращения е (а,Ь)-(а,, т. е. определение величины ЭДС фаз А и В. ЭДС фазы С определяется усилителем 144 этого узла в соответствии с диаграммой на фиг. 3,6 по формуле , где (,, Сь, Sc - фазные ЭДС.
Узел поворота вектора осуществляет поворот трех пропорциональных ЭДС вран;ения на 90 эл. град, в соответствии с диаграммой на фиг. 4,6 по следующим зависимостям:
а
.
.
где е а, е ь, е с - векторы, повернутые на 90 эл. град, относительно ва, еь, е.
Устройство работает в соответствии с векторной диаграммой синхронного двигателя (см. фиг. 4,а). Диаграмма выполнена для амплитудных значений фазы А. Напряжение возбуждения приводится к трехфазной системе статора.
Датчиком тока 7 замеряется величина тока возбуждения, которая подается на преобразователь координат, куда поступает сигнал с датчика положения, пропорциональный углу а между потоком статора и ротора.
При этом -преобразователь координат величину потока возбуждения приводит к трехфазной системе статора.
Датчиками тока 8i-83 замеряется ток статора. Сигналы с датчиков тока статора и сигналы, пропорциональные потокам ротора, поступают на суммирующее устройство, вычисляющее поток в зазоре .
В соответствии с диаграммой поток в зазоре, умноженный на скорость вран1ения со н повернутый в сторону опережения на 90 эл. град., представляет собой ЭДС врандения /фй). Напряжение компенсации должно быть в противофазе с ЭДС вращения.
Это осуществляется следующим образом.
Полученный суммарный поток зазора с выхода суммирующего устройства поступает на вход определителя величины амплитуды 3, сюда же поступает сигнал, пропорциональный скоростн двигателя. Выходная величина пропорциональна ЭДС двигателя. Поворот на 90 эл. град, в сторону отставання осуществляется узлом поворота векторов. Суммирующие устройства 5i-5з складывают векторы управляющего с гнала с векторами компенснрующей ЭДС нофазно.
Введение блока обратного нреобразовання координат в устройство компенсацн позволяет значительно уменьшить оншбку по скорости и повысить устойчивость системы регулирования в целом.
Фор м у л а и 3 о 6 р е т е н н я
Устройство для компенсации ЭДС в синхронном частотно-управляемом электронрнводе, содержащее трехфазный тиристорный преобразователь частоты с входами управления по каждой фазе, датчнкн токов статора н ротора, датчики положения н скорости, блок суммирования, связанный через одни из входов блока умножения с блоком поворота векторов, нри этом другой вход блока умножения соединен с датчиком скорости, отличающееся тем, что, с целью повышення качества регулирования скорости, в него введен блок обратного нреобразования координат с однофазным входом, соединенным с блоком суммирования, и входами для гармонических функций, соединенными с датчиком ноложення, ири этом датчики токов статора соединены непосредственно с соответствующими входамн блока суммирования, а блок поворота векторов - С соответствующим входом управления преобразователя частоты.
Источники информации, принятые во внимание при экспертизе
1.Вейнгер А. н др. Влияние ЭДС врап1,ения на динамику системы регулирования скорости синхронного двигателя. - «Электромеханика, 1972, № 10.
2.Авторское свидетельство СССР № 490247, кл. Н 02Р 5/34, 1972.
3.Авторское свидетельство СССР № 520682, кл. Н 02Р 5/40, 1970.
фиг. 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| Устройство для частотного управления синхронным двигателем | 1972 |
|
SU475717A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Электропривод переменного тока | 1975 |
|
SU661705A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
-fff eHZZb
-CD-Vff
-CZh
4
П
-Sa
4ZD-CDЭ
-CZ}
-iJ
Sa
-CZI-ib
-Sc
риг.г
HZD
