СА
Изобретение относится к устройствам для регистрации сейсмических колебаний, возбуждаемых землетрясениями, взрывами и другими источниками, и может быть использовано для размещения на межпланетных космических носителях .при регистрации сейсмических колебаний поверхностей планет.
Цель изобретения - обеспечение возможности дистанционной перестройки частоты сейсмоприемника за счет переключения жесткости упругих элементов, а также расширение диапазона перестройки частоты сейсмоприемника за счет изменения числа возбуждаемых инертных масс.
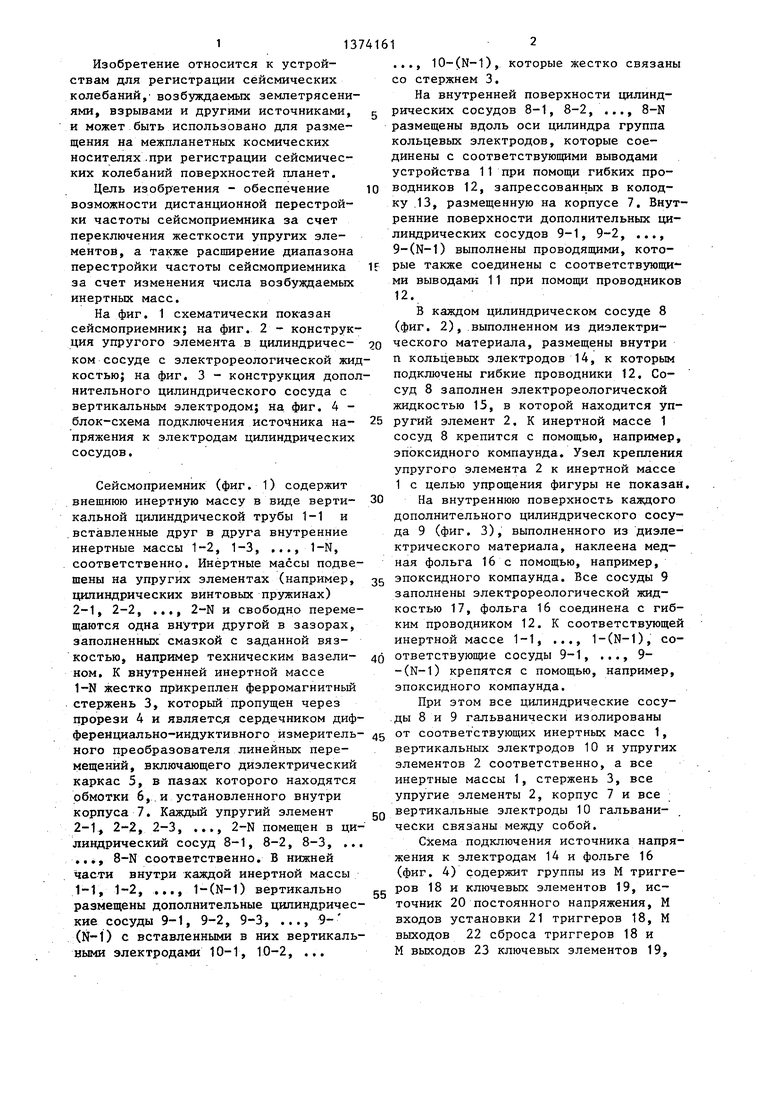
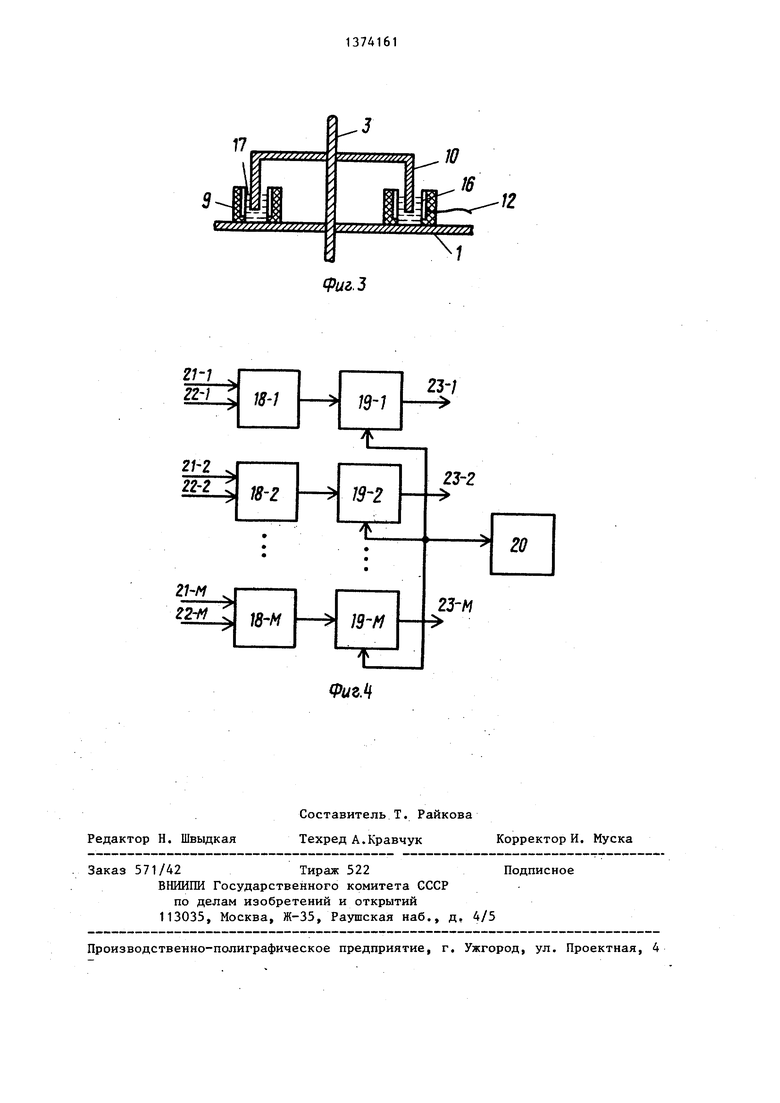
На фиг. 1 схематически показан сейсмоприемник; на фиг. 2 - конструкция упругого элемента в цилиндричес- ком сосуде с электрореологической жидкостью; на фиг. 3 - конструкция дополнительного цилиндрического сосуда с вертикальньм электродом; на фиг. 4 - блок-схема подключения источника на- пряжения к электродам цилиндрических сосудов.
Сейсмоприемник (фиг. 1) содержит внешнюю инертную массу в виде верти- кальной цилиндрической трубы 1-1 и вставленные друг в друга внутренние инертные массы 1-2, 1-3, ..., 1-N, соответственно. Инертные массы подвешены на упругих элементах (например, цилиндрических винтовых пружинах) 2-1, 2-2, .,., 2-N и свободно перемещаются одна внутри другой в зазорах, заполненных смазкой с заданной вязкостью, например техническим вазели- ном. К внутренней инертной массе 1-N жестко прикреплен ферромагнитный стержень 3, который пропущен через прорези 4 и являетсл сердечником дифференциально-индуктивного измеритель- кого преобразователя линейных перемещений, включающего диэлектрический каркас 5, в пазах которого находятся обмотки 6,.и установленного внутри корпуса 7. Каждый упругий элемент 2-1, 2-2, 2-32-N помещен в цилиндрический сосуд 8-1, 8-2, 8-3, .. ,., 8-N соответственно, В нижней части внутри каждой инертной массы 1-1, 1-2, ,,., l-(N-l) вертикально размещены дополнительные цшшндричес- кие сосуды 9-1, 9-2, 9-3, ..., 9- (N-1) с вставленными в них вертикальными электродами 10-1, 10-2, ...
..., 10-(N-1), которые жестко связаны со стержнем 3.
На внутренней поверхности цилиндрических сосудов 8-1, 8-2, ..., 8-N размещены вдоль оси цилиндра группа кольцевых электродов, которые соединены с соответствующими выводами устройства 11 при помощи гибких проводников 12, запрессованных в колодку .13, размещенную на корпусе 7. Внутренние поверхности дополнительных цилиндрических сосудов 9-1, 9-2, ..., 9-(N-1) выполнены проводящими, которые Также соединены с соответствующими выводами 11 при помощи проводников 12.
В каждом цилиндрическом сосуде 8 (фиг. 2), выполненном из диэлектрического материала, размещены внутри п кольцевых электродов 14, к которым подключены гибкие проводники 12. Сосуд 8 заполнен электрореологической жидкостью 15, в которой находится упругий элемент 2. К инертной массе 1 сосуд 8 крепится с помощью, например, эпоксидного компаунда. Узел крепления упругого элемента 2 к инертной массе 1 с целью упрощения фигуры не показан
На внутреннюю поверхность каждого дополнительного цилиндрического сосуда 9 (фиг. 3), выполненного из диэлектрического материала, наклеена медная фольга 16 с помощью, например, эпоксидного компаунда. Все сосуды 9 заполнены электрореологической жидкостью 17, фольга 16 соединена с гибким проводником 12. К соответствующей инертной массе 1-1, ..., 1-(N-1), соответствующие сосуды 9-1, ..., 9- -(N-1) крепятся с помощью, например, эпоксидного компаунда.
При этом все цилиндрические сосу- .ды 8 и 9 гальванически изолированы от соответствующих инертных масс 1, вертикальных электродов 10 и упругих элементов 2 соответственно, а все инертные массы 1, стержень 3, все упругие элементы 2, корпус 7 и все вертикальные электроды 10 гальванически связаны между собой.
Схема подключения источника напряжения к электродам 14 и фольге 16 (фиг. 4) содержит группы из М триггеров 18 и ключевых элементов 19, источник 20 постоянного напряжения, М входов установки 21 триггеров 18, М выходов 22 сброса триггеров 18 и М выходов 23 ключевых элементов 19,
где (n+1)-1 и определяется суммой кольцевых электродов 14, равных n-N штук, и дополнительных сосудов 9, равных (N - 1) штук. При этом прямые выходы триггеров 18-1,..., 18-м соединены с управляющими входами соответствующих ключевых элементов 19-1, 19-2, ..., 19-м, информационные входы которых объединены меж- ду собой и подключены к выходу источника 20 напряжения, выходы 23-1, ..., 23-м ключевых элементов 19-1,..., 19-м соединены с соответствующими электродами 14 и фольгой 16 с помо- щью проводников 12, а входы установки 21 и сброса 22 триггеров 18 соединены с соответствующими выходами устройства управления сейсмоприемника, например ЭВМ (не показана).
Сейсмоприемник работает следующим образом.
Вначале все триггеры 18 устанавливаются в нулевое состояние подачей единичного потенциала на их входы 22 сброса.
При воздействии на грунт силы, направленной по вертикали, корпус 7 смещается на некоторую величину относительно состояния покоя. При этом инер тная масса в виде суммы соответствующих масс 1-1, 1-2, ..., 1-N, масс упругих элементов 2-1, ..., 2-N, масс
сосудов 8-18-N и 9-1,...,
9-(N-1), масс электродов 10-1, ..., lO-(N-l) и массы стержня 3 сохраняет состояние покоя. После снятия воздействия на грунт инертная суммарная масса начинает совершать свободные колебания, возбуждая последовательно соот ветствующие контуры сейсмоприемника. Колебания соответствующих инертных масс 1-1, .., 1-N относительно грунта или относительно корпуса 7 преобразуются с помощью системы стержень 3 - обмотки 6 дифференциально-индуктивного измерительного преобразователя перемещений в электрические колебания, которые далее могут быть усилены и поданы на регистрирующее уст- ройство.
I
Лия настройки многоконтурной цепи в резонанс на другую частоту можно варьировать значениями коэффициентов жесткости К, ,.., К упругих элементов 2-1, ..., 2-N и суммарной массой колеблющихся корпусов, так как известно, что собственная частота
свободных колебаний суммарной массы m определяется по формуле
где К - жесткость соответствующего упругого элемента 2, на котором подвешена суммарная масса т, а количество значений о/о N-n.
Суммарная масса колеблющихся корпусов 1-1, ., 1-N может изменяться дискретно от величины массы 1-N, равN
НОЙ m.j, до массы m , путем под1 1
ключения фольги 16 соответствующих дополнительных сосудов 9-1, ..., 9-(N-1) и кольцевых электродов 14 соответствующих сосудов 8-1, ..., 8-N к источнику 20 постоянного напряжения. Например, для получения суммарной, колеблющейся массы из корпусов 1-N и 1-(N-1) необходимо фольгу 16 дополнительного сосуда 9-(N-1) и все кольцевые электроды 14 сосудов 8-1, ..., 8-(N-2) подключить к источнику 20 постоянного напряжения. Для этого на входы установки 21 соответствующих триггеров 18 необходимо подать единичный потенциал. При этом на прямых выходах этих триггеров 18, устанавливается единичный потенциал, который поступает на управляющие входы соответствующих ключей 19, открывая их, и источник 20 постоянного напряжения подключается к фольге 16 дополнительного сосуда 9-(N-1) и ко всем кольцевым электродам 14 сосудов 8-1, .... 8-(N-2), что вызывае затвердевание электрореологической жидкости 15 и 17, находящейся в сосудах 9-(N-1) и 8-1, ..., 8-(N-2)j Происходит жесткая фиксация масс 1-1, ..., 1-(N-2) к корпусу 7, так как упругие элементы 2-1, ..., 2- -(N-2) не могут деформироваться, а массы 1-N и 1-(N-1) жестко фиксируются к стержню 3, так как вертикальный электрод IQ-(N-l) через затвердевшую жидкость 17 жестко соединен с фольгой 16 дополнительного сосуда 9-(N-1). Таким образом, на упругом элементе 2-(N-1) величина колеблющейся массы равна сумме масс 1-N и 1-(N-1).
Аналогично изменение коэффициентов жесткости К;,, ..., К упругих элементов 2-1, ..., 2-N осуществля513
ется путем подключения соответствующих кольцевых электродов 14 соот- . ветствующих сосудов 8 к источнику 20 напряжения. Известно, что жесткость цилиндрических винтовых пружин обратно пропорциональна числу ее витков, а подключение соответствующего кольцевого электрода 14 к источнику 20 постоянного напряжения приводит к затвердеванию электрореологической жидкости 15, находящейся между соответствующим электродом 14 и витком соответствующего упругого элемента 2, т.е. уменьшается число витков пружины и увеличивается ее жесткость
Формула изобретения
1. Сейсмоприемник, содержащий в одном корпусе не менее двух чувствительных элементов, каждый из которых состоит из инертной массы, упругого элемента и демпфера, а также измерительный преобразователь линей- ных перемещений, неподвижньш элемент которого установлен на корпусе, причем инертные массы выполнены в виде различных по высоте и диаметру цилинров, соосно вставленных один в друго с возможностью перемещения по вертикали, при этом цилиндры в верхней части через упругие элементы связаны друг с другом и корпусом, а сквозь нижние части проходит стержень, жестко связанный с внутренним цилинд- ром и подвижным элементом измерительного преобразователя, отличающийся тем, что, с целью обеспечения возможности дистанционной.
д
n 5 5
0
616
перестройки частоты сёйсмоприемника за счет регулировки жесткости упругих элементов, каждьш упругий элемент помещен в цилиндрический сосуд с электрореологической жидкостью, закрепленный на верхней части цилиндра, на внутренней поверхности цилиндрического сосуда размещена группа кольцевых электродов, соединенных через ключи с источником напряжения, причем каждый цилиндрический сосуд гальванически изолирован от цилиндра и упругого элемента, которые гальванически связаны между собой и с источником напряжения.
2.Сейсмоприемник по п. 1, отличающийся тем, что измерительный преобразователь выполнен дифференциально-индуктивным с ферромагнитным подвижным элементом.
3.Сейсмоприемник по пп. 1 и 2, отличающийся тем, что, с целью распшрения диапазона перестройки частоты сёйсмоприемника за счет изменения числа возбуждаемых инертных масс, в нижней части внутри каждого цилиндра вертикально размещены дополнительные цилиндрические сосуды с электрореологической жидкостью, в которую помещен вертикальный электрод, жестко связанный со стержнем и гальванически соединенный с источником напряжения, причем внутренние поверхности дополнительных цилиндрических сосудов выполнены проводящими
и соединены через ключи с источником напряжения, а наружные изолированы от цилиндрической трубы.
.г-1
/


| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический гаситель колебаний | 1987 |
|
SU1469222A1 |
| Самоориентирующийся сейсмоприемник | 1983 |
|
SU1096592A1 |
| Сейсмоприемник | 1990 |
|
SU1794252A3 |
| СЕЙСМОПРИЕМНИК | 1996 |
|
RU2119179C1 |
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| Пьезоэлектрический сейсмоприемник | 1983 |
|
SU1120262A1 |
| ЭЛЕКТРОМАГНИТНЫЙ СЕЙСМОПРИЕМНИК | 1971 |
|
SU320796A1 |
| Способ контроля нарушенности горного массива и устройство для его осуществления | 1989 |
|
SU1694892A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| Способ преобразования сейсмических сигналов и устройство для его реализации | 1976 |
|
SU623168A1 |

Изобретение относится к устройствам для регистрации сейсмических колебаний и может быть использовано для регистрации колебаний поверхности планеты. Цель изобретения - обеспечение возможности дистанционной перестройки частоты сейсмоприемника за счет переключения жесткости упругих элементов, а также расширение диапазона перестройки частоты сейсмоприемника за счет изменения числа возбуждаемых инертных масс. За счет установки упругих элементов в цилиндрические сосуды с электрореологической жидкостью при подключении кольцевых электродов, установленных в сосудах, к источнику питания происходит затвердевание соответствующих участков жид-кости и тем самым изменение числа рабочих витков пружийы - переключение ее жесткости. Изменение частоты собственных колебаний сейсмоприемника обеспечивается также изменением числа колеблющихся масс за счет фиксации их к стержню с помощью электродов, вставленных в дополнительные сосуды с электрореологической жидкостью. 2 з.п. ф-лы, 4 ил. (Л
7-7 )-2 I-J
Фи1.2
t7
fpu&.3
fpuzM
| 1971 |
|
SU416649A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сейсмоприемник | 1979 |
|
SU890306A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
