Изобретение относится к электротехнике, в частности к импульсным астатическим системам электропривода постоянного тока, и может быть использовано в устройствах с высокими требованиями к точности поддержания частоты вращения.
Целью изобретения является улучшение качества регулирования за счет стабилизации скважности питающих электродвигатель импульсов тока.
На чертеже представлена функци- ональная схема устройства, осуществляющего способ.
Устройство содержит генератор 1 задающей частоты, электродвигатель 2 с датчиком 3 частоты вращения. Выходы генератора 1 задающей частоты и датчика 3 частоты вращения соединены соответственно с входами логического устройства 4 сравнения, выход которого подключен к управляющему входу силового ключа 5. Регулируемый источник 6 тока через силовой ключ 5 соединен с якорной цепью электродвигателя 2. К цепи якоря электродвигателя 2 подключен датчик
7тока якорной цепи, выход которого через блок 8 формирования среднего значения тока и сумматор 9 подключен к управляющему входу регулируемого источника 6 тока. Второй вход сумматора 9 соединен с выходом блока 10 пуска. В качестве блока 8 формиро- - вания среднего значения тока может быть использован фильтр. Логическое устройство 4 сравнения обеспечивает формирование сигналов, соответствующих величине фазового сдвига, поступающих на его входы,последовательностей импульсов и вывод устройства в режим фазового управления.
Устройство работает следующим образом.
Генератор 1 задающей частоты формирует последовательность импульсов, поступающую на первый вход логического устройства 4 сравнения.
8режиме фазового управления каждому импульсу, поступающему на первый вход логического устройства 4 сравнения, отвечает импульс от датчика 3 частоты вращения электродвигателя 2, поступающий на второй вход этого устройства. Логическое устройство
4 сравнения обеспечивает формирование управляющего потенциала при вы- коде электродвигателя 2 в режим фазового управления и управляющие импульсы в режиме фазового управления, при котором импульс от генератора 1
задающей частоты формирует передний фронт управляющего импульса на выходе логического устройства 4 сравнения, а импульс от датчика 3 частоты вращения формирует задний фронт управляющего импульса. При увеличении нагрузочного момента происходит отставание по фазе последовательности импульсов, формируемой датчиком 3 частоты вращения, что ведет к повышению отношения длительности управляющего импульса к периоду последовательности импульсов задающей частоты и соответственно к повышению среднего тока, протекающего через
якорь электродвигателя 2, компенсирующего возросший нагрузочный момент. (
Этот ток регистрируется датчиком 7 тока якорной цепи. Сигнал тока усредняется блоком 8 формирования среднего значения тока.
Увеличение уставки токоограничения ведет к возрастанию амплитуды токовых импульсов, протекающих через якорь
электродвигателя 2, соответственно к возрастанию момента, развиваемого электродвигателем 2, что ведет к уменьшению фазового рассогласования управляющих последовательностей импульсов и уменьшению скважности импульсов до значения, определяемого отношением среднего тока и соответствующей ему величине токоограничения. Устойчивость управления определяется
выбором динамических характеристик звеньев устройств.
Обратная связь и момент включения устройства полностью блокирует регулируемый источник 6 тока, поскольку
при отсутствии тока через якорь электродвигателя 2 на управляющий вход регулируемого источника 6 тока поступает нулевой сигнал. В связи с этим необходимы меры для пуска элекг
тродвигателя, для чего служит блок 10 пуска, обеспечивающий в начальный момент включения электродвигателя начальный задаюпщй сигнал, амплитуда и длительность которого достаточны
для формирования начального тока в якоре электродвигателя 2.
Таким образом, способ регулирования частоты вращения электродвигателя обеспечивает в широком диапазоне нагрузок и частоты вращения достаточно высокую скважность токовых импульсов что позволяет использовать датчик частоты вращения низкого класса точности и хорошую управляемость электропривода.
Форм, ула изобретения
Способ регулирования частоты вра- )цения электродвигателя постоянного тока, заключающийся в формировании двух последовательностей импульсов, первая из которых пропорциональна. заданной, а вторая -действительной частоте вращения электродвигателя.
сравнении первой и второй последова тельностей импульсов и -получении в результате сравнения третьей последовательности импульсов, поступающих на электродвигатель, причем длительность импульсов третьей последовательности пропорциональна фазовому рассогласованию сравниваемых частот, отличающий ся тем, что, с целью улучшения качества регулирования за счет стабилизации скваж- кости питающих электродвигатель импульсов тока, измеряют средний ток, потребляемый электродвигателем и по его значению ограничивают амплитуду тока в цепи якоря электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1376202A1 |
| Система регулирования скорости | 1984 |
|
SU1229727A1 |
| Устройство для управления тиристорным преобразователем электропривода постоянного тока | 1976 |
|
SU661711A1 |
| Устройство для управления электродвигателем постоянного тока | 1977 |
|
SU928579A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 1991 |
|
RU2025883C1 |
| Электропривод постоянного тока | 1979 |
|
SU824392A1 |
| Электропривод постоянного тока | 1989 |
|
SU1656653A1 |
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| Устройство для управления электродвигателемпОСТОяННОгО TOKA | 1978 |
|
SU811472A1 |
Изобретение относится к электротехнике и м.б. использовано в устройствах с высокими требованиями к точности поддержания частоты вращения. Целью изобретения является улучшение качества регулирования за счет стабилизации скважности питающих электродвигатель импульсов тока. Способ заключается в формировании генератором 1 задающей частоты первой последовательности импульсов и второй последовательности импульсов, поступающей от датчика 3 частоты вращения электродвигателя 2. На выходе логического устройства 4 сравнения формируется третья последовательность импульсов, длительность которых пропорциональна фазовому рассогласованию сравниваемых частот. Дополнительно с помощью датчика 7 тока измеряют средний ток, потребляемый электродвигателем 2, и по его значению ограничивают амплитуду тока в цепи якоря, что позволяет стабилизировать скважность импульсов, питающих электродвигатель, и использовать датчик частоты вращения низкой точности. 1 ил. i (Л 00- со сх ;о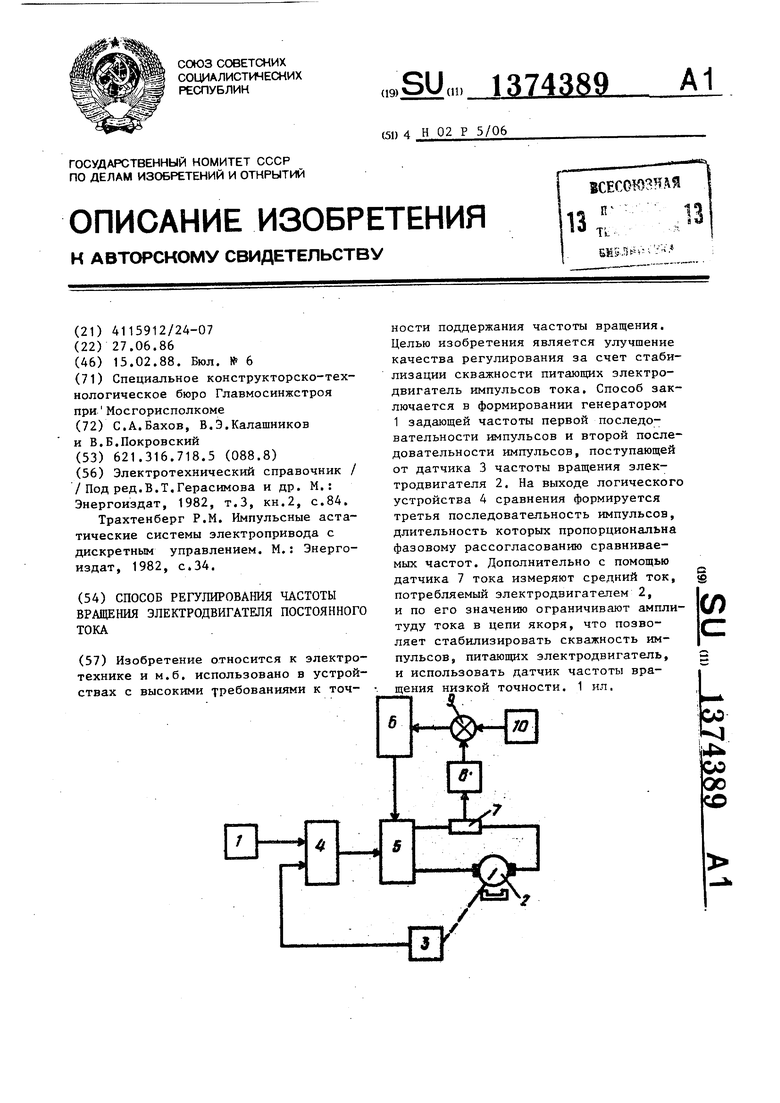
| Электротехнический справочник / / Под ред.В.Т.Герасимова и др | |||
| М.: Энергоиздат, 1982, т.З, кн.2, с.84 | |||
| Трахтенберг P.M | |||
| Импульсные астатические системы электропривода с дискретным управлением | |||
| М.: Энергоиздат, 1982, с.34. |
