Изобретение относится к бумагоделательной технике и может быть использовано при цифровом регулировании скорости вращения электродвигателя постоянного тока привода бумагоделательной машины.
Цель изобретения - повышение динамической точности системы.
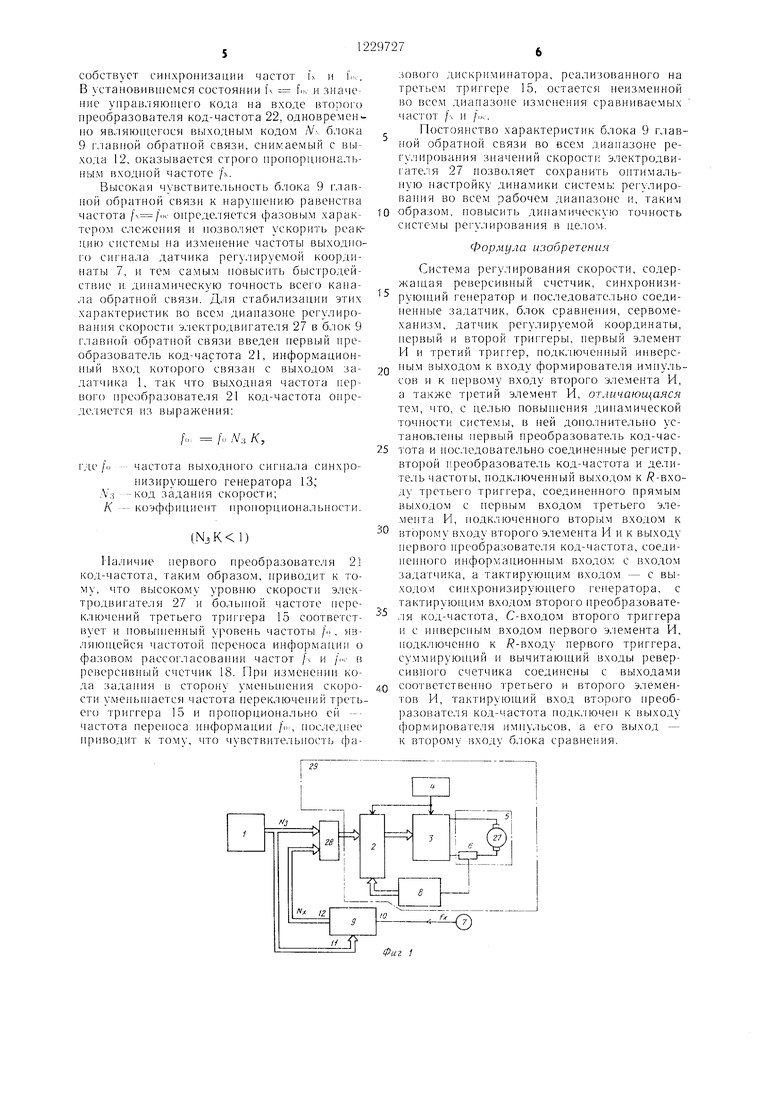
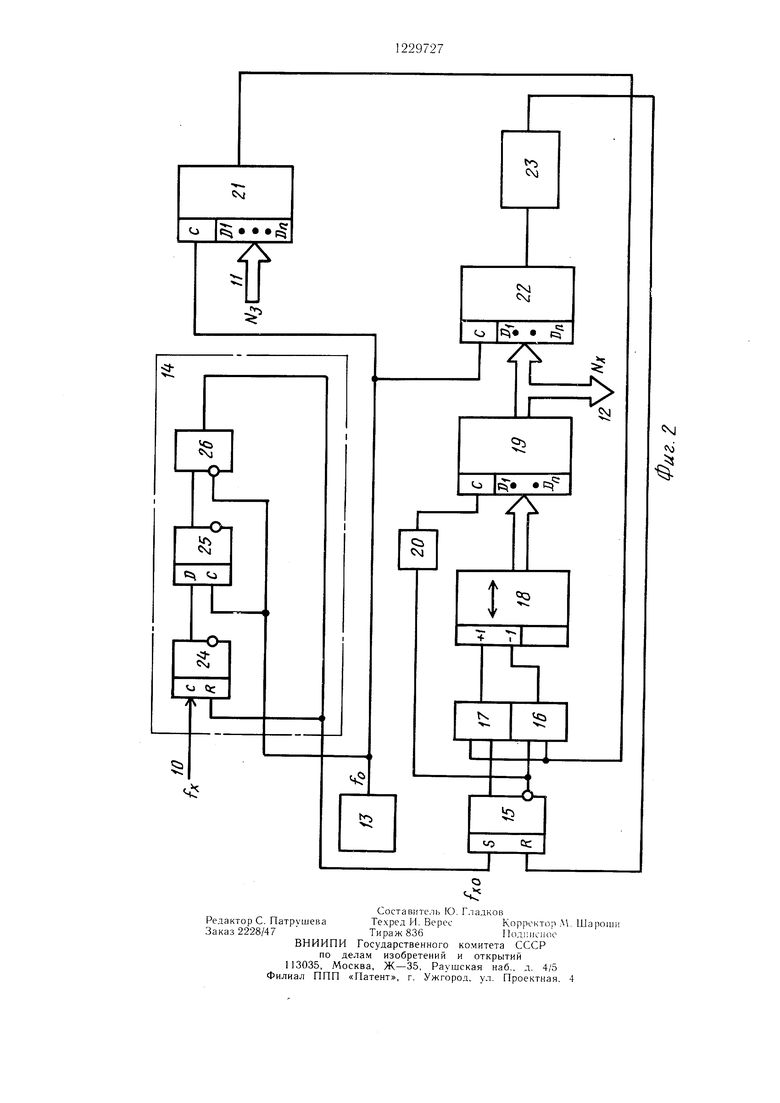
На фиг. 1 приведегга функциональная схема систе.мы привода; на фиг. 2 - принципиальная схе.ма блока г.павной обратной связи.
Схема содержит задатчик 1, регулирую- шее устройство 2, усилитель 3 .моп;ности, источник 4 питания, исполнительный гатель 5, датчик 6 тока, датчик 7 регулируемой ко.ординаты, блок 8 местной обратной связи, блок 9 главной обратной связи с информационным и управляющим входами и выхода.ми 10-12, синхронизирующий генератор 13, блок 14 синхронизации, третий триггер 15, второй и третий элементы И 16 и 17, реверсивный счетчик 18, регистр 19, формирователь 20 импульсов, первый и второй преобразователи 21 и 22 код-частота, делитель 23 частоты первый и второй триггеры 24 и 25, первый элемент И 26, электродвигатель 27 постоянного тока, блок 28 сравнения, сервомеханизм 29, N - выходной сигнал задатчика 1, fx -выходной сигнал датчика регулируемой координаты 7, NX- выходной сигнал блока 9 главной обратной связи, хо - выходной сигнал блока 14 синхронизации, fx - выходной сигнал синхронизирую- шего генератора 13.
Работу предлагаемой системы рассмотрим применительно к случаю цифрового регулирования скорости вращения вала э;1ек- тродвигателя постоянного тока привода бумагоделательной мащины. В это.м случае в состав исполнительного двигателя входят электродвигатель 27 постоянного тока и датчик 6 тока якоря электродвигателя 27 постоянного тока.
В состав сервомеханизма 29 входят регулирующее устройство 2, усилитель 3 мощности, источник 4 питания, исполнительный двигатель 5 и блок 8 местной обратной связи.
В качестве усилителя 3 мощности может- быть использован тиристорный преобразователь с блоками управления.
Регулирующее устройство 2, блок 28 сравнения и задатчик 1 могут быть реализованы на элементах цифровой вычислительной техники.
В качестве блока 8 местной обратной связи может быть использован преобразователь аналог-код, осуществляющий необходимые функциональные преобразования.
Поскольку в рассматриваемом примере регулируемой координатой является скорость то в качестве датчика 7 регу-лируемой координаты может быть использован импульсный датчик скорости.
Е) качестве управляемого блока 9 главной обратной связи может быть применен управляемый проебразовате.чь частота-код с частотны.м информационным в.ходом. В сос- тав блока 9 главной обратной связи входят синхронизирующий генератор 13, блок 14 синхронизации, триггер 15, элементы И 16 и 17, реверсивный счетчик 18, регистр 19, нреобразователи код-частота 21 и 22 и делитель 23 частоты. В состав блока 14 синхрони- O зации входят триггеры 24 и 25 и элемент И 26. В качестве триггера 15 применен / S-Tpnrrep.
Система регулирований работает следующим образом.
5 Поскольку предлагаемая система регулирования представляет собой двухконтур- ную цифроаналоговую систему регулирова- 11ия скорости вращения с вненлним конту- ро.м регулирования скорости вращения вала электродвигателя 27 постоянного тока
0 и внутренним контуром регулирования тока якоря электродвигателя 27 постоянного тока, то алгоритм регулирования закладывается в память цифрового регулирующ,его устройства 2. которое может быть и микропроцессорным. Для обеспечения работы регулирую- нхего устройства 2 вся информация, поступающая на его входы, должна быть представлена в форме параллельного двоичного кода. Код заданных значений скорости вырабатывается задатчиком 1 и поступает на
д первый вход блока 28 сравнения, на второй вход которого поступает выходной сигнал блока 9 главной обратной связи. Выходной сигнал блока 28 сравнения поступает на первый вход регулирующего устройства 2, на второй вход которого поступает код теку5 чшх значений тока якоря электродвигателя 27, вырабатываемый датчиком 6 тока (шунт в якорной цепи) в сочетании с блоком 8 местной обратной связи (т. е. со вторичным преобразователем аналог-код). Регулирующее устройство 2 в соответствии с за- программированпым алгоритмом вычисляет код регулирующего воздействия, управляю- 1ЦИЙ работой усилителя 3 мощности (т. е. ти- ристорного преобразователя с блоками управления, включающими элементы преобразова2 ПИЯ выходного кода регулирующего устройства 2 в сигналы импульсно-фазового управления). Якорная цепь электродвигателя 27 подключена к выходам усилителя 3 мопдности, питающегося от источпика 4 питания. Цикличность работы регулирующего
0 устройства 2 синхронизируется по частоте и фазе переключений переменного напряжения на анодах тиристорного преобразователя усилителя 3 мощности благодаря связи регулирующего устройства 2 с источником 4 питания. В качестве сигнала датчика
5 6 тока используется напряжение, снимаемое с щунта в якорной цепи электродвигателя 27. Скорость вращения вала э.лектродви- гателя 27 фиксируется датчиком регулируе0
МОЙ координаты 7, выходной сигнал которого поступает на информационный вход блока 9 главной обратной связи.
Особенности работы данной системы определяются работой блока 9 главной обратной связи, который по своей структуре яв- ляется преобразователем частота-код следящего типа, в цепь обратной связи которого включены преобразователь код-частота 21 с делителем 23 частоты, а цепь прямой связи выполнена в виде цифрового интеграто- ра на базе реверсивного счетчика 18 с регистром 19 промежуточной памяти. Мгновенное значение кода, записанное в счетчике 18, представляет собой интегральное рассогласование двух сравниваемых частот - частоты импульсов fxo , поступающей с выхода блока синхронизации 14 на S-вход триггера 15, и частоты foe, поступающей по цепи обратной связи преобразователя код-частота 22 на / -вход третьего триггера 15. Блок 14 синхронизации служит для исключения возможности одновре.менного поступления импульсов упомянутых частот на оба входа третьего триггера 15 путем принудительной привязки момента поступления импульсов частоты на вход третьего триггера 15 к фронту импульсов опорной частоты fx синхронизирующего генератора 13. При поступлении очередного импульса входной частоты fx на счетный вход первого триггера 24 в последнем записывается единичное состояние. Сигнал логической единицы с его выхода обеспечивает по /)-входу разрешение записи единицы во второй триггер 25. Запись единицы производится передним фронтом очередного выходного синхронизирующего импульса генератора 13, поступающего на тактирующий вход второго триггера 25 и на инверсный вход первого элемента И 26, прямой вход которого связан с прямым выходом второго триггера 25. Благодаря инверсии по входу импульс на выходе элемента И 26 формируется по заднему фронту импульса опорной частоты fo. Импульс с выхода первого элемента И 26 обнуляет первый триггер 24 и поступает на S-вход третьего триггера 15. Передний фронт следующего импульса частоты fo обнуляет второй триггер 25. Таким образом, импульсы частоты fxo поступают на вход третьего триггера 15 только в моменты, фиксируемые задним фронтом импульсов частоты fo. Частота выходного сигнал-а синхронизирующего генератора 13 до лжна по крайней мере вдвое, а реально для снижения вносимой неравно- мерности в 50-100 раз превьпиать входную частоту fx.
В синхронном следящем режиме (fx for) третий триггер 15 находится в режиме переключений с частотой fx при постоянстве скважности переключений. При нару- шении равенства указанных частот третий триггер 15 переключается с частотой, равной меньшей из сравниваемых частот, оста
ваясь по времени преимущественно в том состоянии, которое подтверждается импульсами большей из частот. Так, при третий триггер 15 находится преимущественно в состоянии единицы, устанав,чиваемой по его 5-в.оду. Различие в скважности напряжения на прямом и инверсном выходах третьего триггера 15 является признаком, который используется в качестве сигнала рассогласования в блоке 9 главной обратной связи.
На первые входы второго и третьего элементов и 16 и 17 подаются управляющие сигналы с выходов третьего триггера 15. На их вторые входы подана выходная частота fo; преобразователя код-частота 21. Таким образом, количества импульсов частоты
5
0 0 0 g
5
0
5
5
о. , которые поступают через второй и третий
1,
элементы 16 и 17 на входы сложения и вычитания реверсивного счетчика 18, пропорциональны длительности пребывания третьего триггера 15 в состоянии единицы или нуля соответственно в каждом цикле его переключения. Перенос информации из реверсивного счетчика 18 в регистр 19 производится в конце каждого цикла переключения при возврате третьего триггера 15 в состояние нуля путем подачи короткого импульса разрешения на тактируюи1.ий вход регистра 19, который формируется формирователем 20 импульсов, подключенным к инверсному выходу третьего триггера 15. Если за время цикла переключения третьего триггера 15, разность в числе импульсов, поступивших на разные входы реверсивного счетчика 18, не равна нулю, то значение управляющего кода, записанного в регистре 19, изменяется с учетом знака разности. Это значение кода приводит к пропорциональному изменению частоты foi- на выходе второго преобразователя 22 код-частота. В качестве опорной для указанного преобразователя также используется частота синхронизирующего генератора 13, причем тактирование преобразователя код-частота 22 по тактирующему входу и, в конечно.м счете, формирование импульсов частоты fo , поступающих на R-вход третьего, триггера 15, происходит передним фронтом импульсов частоты fo, в то время как импульсы частоты fxi. (на S-входе третьего триггера 15) формируются задним фронтом импульсов частоты fo. Делитель 23 частоты включен на выходе второго преобразователя 22 код-частота и с,чужит д, 1я сглаживания возможной неравномерности на его выходе, а также для настройки чувствительности всей систе.мы. Выбор коэффициента деления делителя 23 частоты наряду с соотношением между значением частоты fo,, коэффициенто.м преобразования второго преобразователя 22 код-частота и разрядностью реверсивного счетчика 18 определяет чувствительность блока 9 главной обратной связи.
Знак рассогласования, получаемого в реверсивном счетч1 ке 18, таков, что он способствуст синхронизации частот 1 и Г.-,.
8установившемся состоянии ) fi.. и значе пне унравляюн1его кода на входе второго иреобразователя код-частота 22, одновременно яв;1яю1цсгося выходным кодом Л л блока
9г лавной обратной связи, снимаемый с выхода 12, оказывается строго нронорциональ- ным входной частоте /х.
Высокая чувствительность блока 9 главной обратной связи к наруи е1 ию paijeHCTtui частота оиреде-тяется фазовым характером слежения и нозволяет ускорить реакцию системы на изменение частоты выходно- () сигнала датчика рег лируемой координаты 7, и тем самым новысить быстродействие и. дииамическую точность всего Kaiia- ла обратной связи. Для стабилизации этих характеристик во всем диапазоне регулирования скорости электродвигателя 27 в б.ток 9 главной обратной связи введен первый нре- образователь код-частота 21, информационный вход которого связан с выходом за- датчика 1, так что выходная частота первого преобразователя 21 код-частота оире- де.тяется из выражения:
/- / . Л- з /С,
частота выходного снг нала синхронизирующего генератора 13;
-код задания скорости;
-- коэф(|)ициеит нропорциональности.
()
Наличие первого преобразователя 2 код-частота, таким образом, приводит к тому, что высокому уровню скорости электродвигателя 27 н болыиой частоте переключений третьего триггера 15 соответет- вует и повышенный уровень частоты /... являющейся частотой переноса ипформации о фазовом рассо1 ласованин частот / и /.к- в реверсивный счетчик 18. При изменении кода задания в сторону уменьшения скорости у,епынается частота переключений третьего триггера 15 н нропори.ионально ей -- частота переноса информанин / .-, юследнее приводит к тому, что чувствнте.тыюст) ()}а5
5
зового дискриминатора, реализо анного на третьем тригге)е 15, остается неиз.менной во все.м диапазоне изменения сравниваемых чаетот f и /ос.
Постоянство характеристик блока 9 главной обратной связи во всем диапазо {е ре- гулн1)ования значений cKopocTi: электродви- | ателя 27 нозволяет сохранить оптимальную настройку динамики системы рег улиро- вапия во всем рабочем диапазоне и, таким образом, новысить динамнчеекую точность системы )е1 у;1ирования в целом.
Формула изобретения
Система регулирования скорости, содержащая реверсивный счетчик, синхронизирующий генератор и пос,тедовательно соединенные задатчнк, блок сравнения, сервомеханизм, датчик регулируемой координаты, иервый и второй триггеры, первый элемент И и третий триггер, подк,тюченн1 1Й инверсным выходом к входу формирователя импу,чь- сов и к нервому входу второго элемента И, а также т|)етий элемент И, отличающаяся тем, что, с целью повьпиения динамической точности систе., в ней донолнительно уе- тановлепы первый преобразователь код-частота и нос.тедовагельно соединенные регистр, второй преобразователь код-частота и дели- те,1Ь частоты, подключенный выходом к R-BXO- ду третьего триггера, соединенного прямым выходом с входом третьего элемента И, подключенного вторым входом к второму входу второго элемента И н к выходу первого нреобразовате,тя код-частота, соеди- неппого информационным входом е входом задатчика, а тактирующим входом - е выходом синхронизирующего генератора, с тактирующим входом второго нреобразовате- .|я код-час 1 ота, С-входом второго триггера и с иивереиым входом нервого э.темента И, подк.чюченно к / -входу нервого триггера, суммирую1ний и вычитающий входы ревер- еивного счетчика соединены с выхода.ми соответственно третьего и второго э.темен- тов И, тактирующий вход второго преоб- разо15ате,ля код-частота подк.тючен к выходу формирователя импульсов, а его выход - к второму ходу б.тока сравнения.
г;L ,
ч:
Составитель Ю. Гладко:
Редактор С. ПатрушеваТехред И. ВересКорректор Л. lUapoiiiii
Заказ 2228/47 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1985 |
|
SU1262677A1 |
| Устройство допускового контроля временных интервалов | 1991 |
|
SU1798720A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Цифровая система регулирования частоты вращения двигателя постоянного тока | 1986 |
|
SU1386959A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Устройство для контроля температуры погружного электродвигателя и давления на приеме насоса | 1989 |
|
SU1652525A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
Изобретение относится к бумагоделательной и металлургической технике и может найти ншрокое применение при регулировании скорости вращения валков бумагоде- лательны.х ма1иин и прокатных станов. В данной системе реи1ается задача обеспечения постоянства ее характеристик во всем диапазоне регулируемых скоростей за счет обеспечения зависимости характеристик блока главной обратной связи (БГОС) от сигнала задания. Выходной сигнал задатчика поступает на управляющий вход БГОС и на первый вход блока сравнения, в котором сравнивается с выходным сигналом БГОС. С выхода блока сравнения сигнал рассогласования поступает на первый вход регулирующего блока, в котором алгебраически суммируется с выходным сигналом блока местной обратной связи (БМОС) и в котором формируется закон регулирования. Выходной сигнал регулирую цего блока усиливается по мощности и подается на входы электродвигателя постоянного тока. Ток якоря электродвигателя измеряется датчиком тока, выходной сигнал которого подается на вход БМОС. Скорость вранления вала электродвигателя измеряется датчиком регулируемой координаты (например, частотным датчиком скорости), выходной сигнал которого подается на информационный вход БГОС. 2 ил. Ш (Л rsD tsD СО ю 
| Следящая система | 1979 |
|
SU849135A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровой регулятор | 1982 |
|
SU1013907A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления скоростью двигателя с самоконтролем | 1981 |
|
SU1061107A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
