(Л
00
СХ)
ю ел
регулятора параметра 1, а выходом - с каналом питания второго сигнализатора 3, ка:нал сброса - с каналом нижнего значения параметра Р (за- датчик) 6, канал сброса второго сигнализатора 3 подключен к каналу верхнего значения параметра Pj, (за- датчик) 7. а выход сигнализатора 3 - к одному из входов реле переключения 8, другой вход которого соединен с
77825
выходом регулятора параметра 1, управляющая камера - с каналом отключения регулятора параметра 1, а выход - с исполнительным механизмом 9. Благодаря этому улучшается реакция системы на импульсные возмущения и исключаются скачкообразные изменения управляющего воздействия при переходе на режим ручного дистанционного управления. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Пневматический регулятор | 1989 |
|
SU1619230A2 |
| Устройство для дистанционного контроля состояния пневматических аналоговых исполнительных механизмов | 1987 |
|
SU1522158A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический шаговый экстремальный регулятор | 1975 |
|
SU651313A2 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Пневматический регулятор | 1985 |
|
SU1262449A1 |
| Пневматический пропорциональный регулятор | 1978 |
|
SU746412A1 |
Изобретение относится к технике автоматизации производств и может быть использовано в системах управления с высокими требованиями к качеству регулирования и к безопасности технологического процесса в нефтеперерабатывающей и химической промышленности. Цель изобретения - повьшение качества регулирования за счет введения новых элементов и связей. Это достигается тем,что в устройстве установлены повторители со сдвигом 4 и 5, первый и второй сигнализаторы 2, 3 предельных значений , канал питания первого сигнализатора 2 связан входом с выходом с (б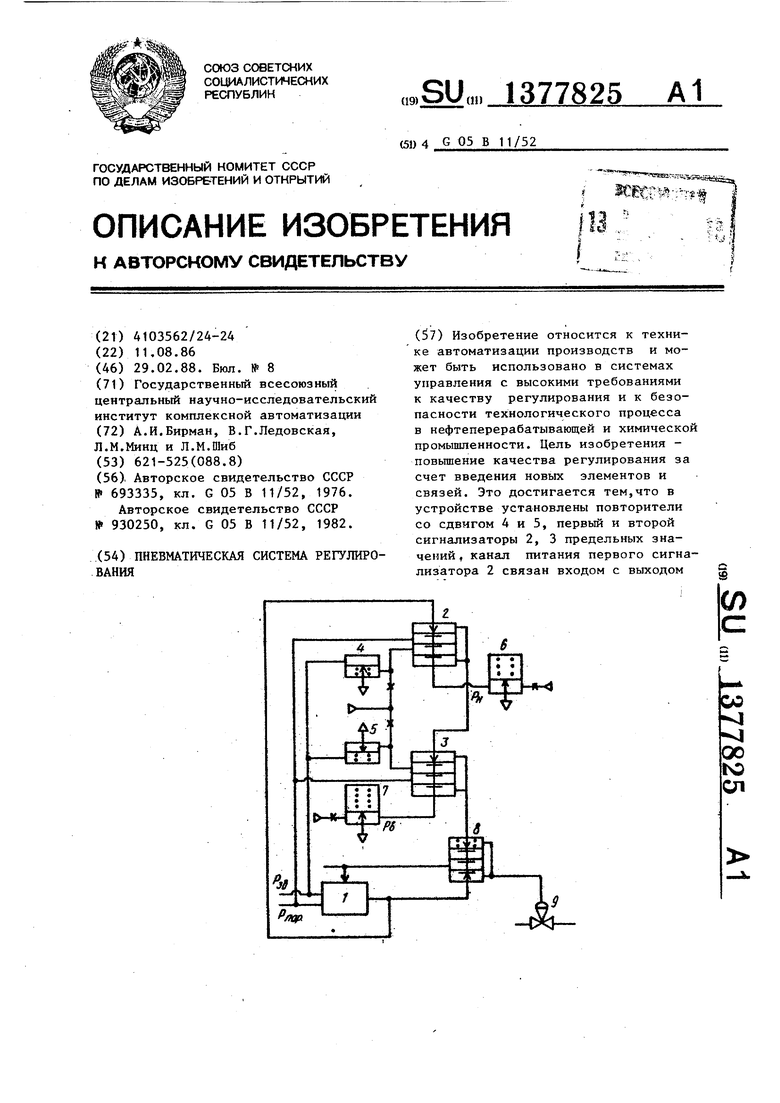
1
Изобретение относится к приборостроению и. может быть использовано в системах автоматизации технологических процессов в широком диапазоне изменения задающих и возмущающих воздействий..
Цель изобретения - повьшение качества регулирования.
На чертеже приведена принципиальная схема предложенной пневматической системы регулирования.
Система содерткит регулятор 1 параметра (типа ПРЗ.З системы Старт), первый 2 и второй 3 сигнализаторы предельных значений, повторители 4 и 5 со сдвигом, каналы верхнего Рц и нижнего Pj граничных значений параметра с задатчиками 6 и 7, реле 8 переключения, исполнительный механизм 9.
К соответствующим входам регулятора 1 подключены каналы параметра РПИП и задания . Канал параметпчр , 33 J
ра соединен со взаимно инверсными входами сигнализаторов 2 и 3, другие входы которых связаны с выходами повторителей 4 и 5, своими входами подключенных к каналу задания Канал питания первого сигнализатора 2 соединен с выходок регулятора 1 и первым коммутируемым входом реле 8 переключения, канал сброса - с каналом нижнего значения параметра Рц , задатчик 6 выход - с каналом питания второго сигнализатора 3, канал сброса которого связан с каналом верхнего параметра Р (задатчик 7), а выход - с вторьм коммутируемым входом реле 8 переключения, управляющая камера которого соединена с каналом отключения Р регулятора 1, а выход - с исполнительным механиз- мом 9.
Система работает следующим образом.
Предварительно с помощью повторителей 4 и 5 со сдвигом настраивают- ся границы зоны допустимых отклонений регулируемого параметра Л1 и + ( i,H Л сдвиги
повторителей 4 и 5), а в каналах 6 и 7 задатчиков - предельные (гранич- ные) значения выходного сигнала Р и Р„ (обычно Pg 1,0 и Рц 0,2 кгс/см ).
Пока регулируемый параметр находится в зоне допустимых отклонений
- Л, Ррор Р +А2 .верхние сопла сигнализаторов 2 и 3 открыты и в линию исполнительного механизма поступает сигнал регулятора параметра.
I
При выходе параметра за границы
зоны открывается нижнее сопло соответствующего сигнализатора 2 или 3 и исполнительнь1й механизм 9 оказывается сообщенным с каналом Р.. или
задатчика 6 или 7 и перемещается в одно из крайних положений.Таким образом, вне зоны допустимых отклонений осуществляется форсиро- ванное релейное управление, иногда совпадающее с блокировкой в пред- аварийных и аварийных ситуациях. В отличие от прототипа предложенное устройство осуществляет форсированное управление не только при глубо
ких возмущениях по нагрузке,но и
при значительных изменениях задания, вызывающих нарушение условия
РП«Р P-J 2 ) При этом за счет того, что форсированный управляющий сигнал не запоминается при возвращении параметра в допустимую зону, реакция системы на импульсные во31 ущения по нагрузке улучшается.
В режиме ручного дистанционного управления ( 1) линия исполнительного механизма коммутируется с задатчиком станции управления (не показанной), благодаря чему исключается возможность скачкообразного изменения управляющего воздействия в этом режиме в отличие от прототипа.
Формула изобретения
Пневматическая система регулирования, содержащая регулятор параметра, подключенный к каналам параметра 25 и задания, исполнительный механизм, первый и второй сигнализаторы пре
дельных значений с каналами нижнего и верхнего значений параметра, реле переключения, первый коммутируемый вход которого связан с выходом регулятора параметра, а выход - с исполнительным механизмом, отличающаяся тем,что, с целью повышения качества регулирования, в ней установлены два повторителя со сдвигом, входы которых соединены с каналом задания, а выходы - с первыми взаимоинверсными входами сигнализаторов, вторые входы которых связаны с каналом параметра, причем канал питания первого сигнализатора связан с выходом регулятора параметра, канал сброса - с каналом нижнего граничного значения параметра, выход - с каналом, питания второго /сигнализатора, канал сброса которого подключен к каналу верхнего граничного значения параметра, выход - к второму коммутируемому входу реле переключения, управляющая камера которого связана с каналом отключения регулятора параметра.
| , Авторское свидетельство СССР 693335, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматическое устройство управления | 1980 |
|
SU930250A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
