1
Изобретение относится к технике .автоматического регулирования и управления, а именно к пневматическим регуляторам -с переменной структурой, и может быть применено в системах ав- 5 томатического регулирования технологических процессов широкого класса, например в нефтеперерабатывающей, нефтехимической и других отраслях промышленности,Vfl
Известен пневматичёскйй регулятор с переменной структурой, содержащий подключенные к входным каналам параметра и задания пропорциональное и интегральное звенья и формирователь 15 функции переключения, состоящий из последовательно соединенных блока вычисления модуля ошибки и релейного дифференциатора, выход блока вычисления модуля ошибки соединен с входом. 20 реле.йного дифференциатора, выходы пропорционального и интегрального звеньев подключены к выходному сумматору, а его выход - к выходным каналам регулятора 1
Недостатком известного регулятора является то, что установившийся режим система характеризуется скорее автоколебанием, чем рассчитанным устойчивым режимом снствйл во время уста- 30
новившихся условий при регулировании медленно протекающих технологических процессов.
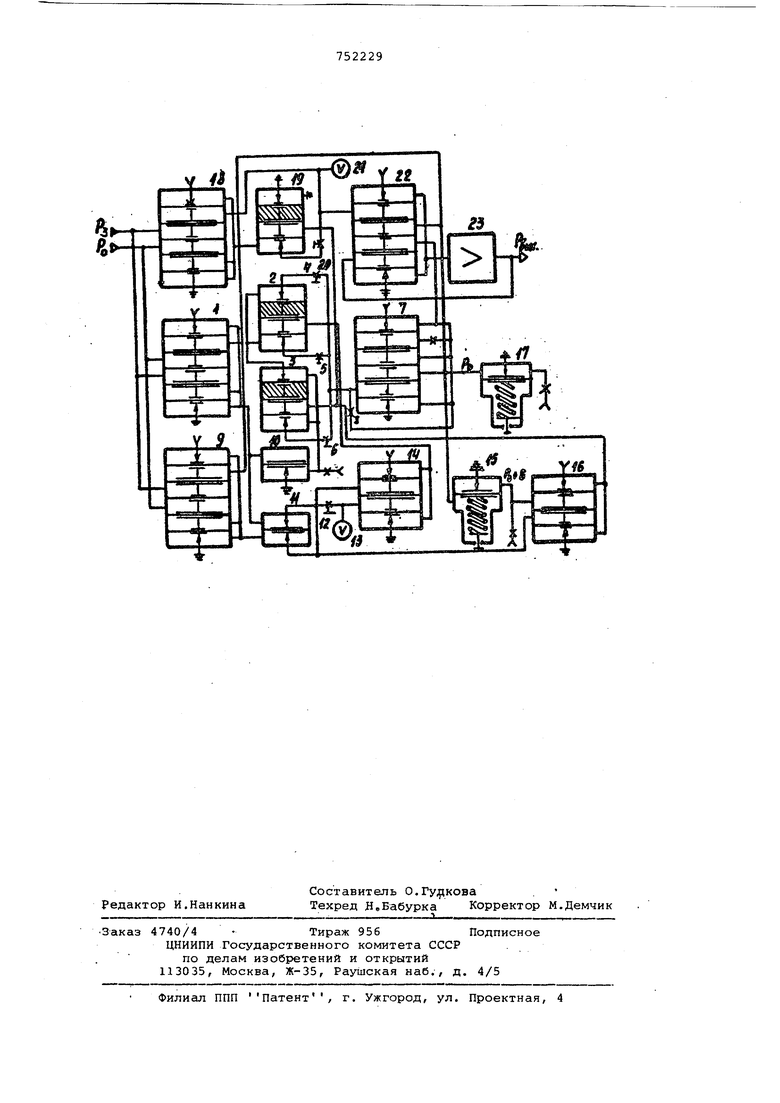
Наиболее близким к данному техническому решению является пневматический регулятор, содержащий подключенное к каналам параметра и задания интегральное звено, тгропорциональнОё звено, состоящее из элемента сравнения, первого и второго реле и элемента умножения на постоянный коэффициент, выход которого подключен к входу выходного сумматора, подключенный к каналам параметра и задания формирователь функции переключения, состоящий из элемента сравнения, выход которого соединен с одним из входов элемента ИЛИ, другой вход которого связан с выходом элемента сравнения пропорционального звена, повторителя, и подключенного к выходу элемента ИЛИ релейного дифференциатора, выход которого соединен с управляющей Кс1мерой первого реле пропорционального звена, и задатчик опорного давления, выход которого соединен с элементом умножения на постоянный коэффициент, эле }епто1 сравнения пропорционального звена, элементом сравнения формирователя функции переклгочения, выходным сумматором и интеграль ным звеном, выход которого подключен к второму входу выходного сумматора, подключенного выходом через усилитель к выходному каналу регулятора С2.. Известному регулятору также присущи вышеуказанные недостатки. Цель изобретения - расяаирение функ циональных возможностей, Поставленная цель достигается за счет того, что в регуляторе установ.лены повторитель со сдвигом и элемент сравнения, причем/вход повторителя со сдвигом соединен с выходом задатчика опорного давления, а выход подключен к плюсовой камере элемента сра нения, минусовая камера которого соединена с выходом элемента ИЛИ, выход элемента сравнения соединен с управлякщей к:амёрой второго реле пропорционального звена и входом интегрирующего звена, выход элемента сравнения пропорционального звена через повторитель соединен с проточными камерами второго реле, первый выход которого соедийен с входами первого реле, а второй выход и выходы первого реле через переменные дроссели соединены с минусовой камерой элемента умножений на постоянный коэффициент. На чертеже приведена принципиальная схема регулятора. Регулятор содер жит пропорциональное звено, состоящее из элемента 1 сравнения, первого 2 и второго реле 3, переменных- дросселей 4, 5 и б, элемента 7 умножения на постоянный коэффициент, постоянного дросселя 8, формирователь функции переключения, состоящий из блока вычисления модуля ошибки, включающего элемент 9 сравнения, повторитель 10, элемент ИЛИ И, из релейного дифферен циатора, включающего переменный дрос сель 12, емкость 13, элемент 14 сравнения, повторитель 15 со сдвигом, элемент 16 сравнения, задатчик 17 опорного давления, интегральное звено состоящее из элемента 18 сравнения; третьего реле 19, переменного дроссел 20, емкости 21, выходной сумматор 22 усилитель мощности 23. п 3 - каналы параметра и задания, Bbu Выходной канал регулятора. Регулятор работает следующим обра зом. В каналы регулятора подаются сигн лы, пропорциональные заданному Рд и текущ к РГ, значениям регулируемой величины и опорное давление. Регулят отрабатывает следующий алгоритм упра ления р -р аых.23 вых . Гк приРо+е р мР., K.Kjnpn Ро-«-е:Ро 1Рд$, к приРд С Р +Ц, г , loonpMPo e Povlp l, Х сигнал рассогласования, Р; Р -Р ; О Т опорное давление; Е - давление для включения линейного регулятора (при некоторых малых отклонениях от установившегося режима); К - коэффициент усиления регулятора; TI,- время интегрирования регулятора; JlPp-Pal S- функция переключения, 5 Т Изложим работу регулятора по элеентным цепочкам. Выходной сигнал элемента 1 сравнеияBMX.I о РП + РЭ проходя через проточные камеры первого и второго реле 2, 3 (в зависимости от S,е ), переменные дроссели 4, 5 и б, поступает в минусовую камеру элемента 7 умножения, на выходе которого ртрабатывается регулирующее воздействие вида . Рьых.7 К(Р„ - РЭ) + Рд, где К получает один из трех значений Kj, Kj, Kg в зависимости от , 5. А S формируется при помощи блока формирования функции переключения dlPn-P I РВЫХ. ,4 S этом с помощью элементов сравнения 1 и 9 и элемента ИЛИ 11 вычисляется модуль ошибки РЗЫХ. U 1Рп - Pfll + .it и PQ + Е подаются соответст-. венно в минусовую и плюсовую камеры элемента 16 сравнения. Когда Г PQ + е IPxI + РО выходе элемента 16 сравнения получается сигнал . Этот сигнал поступает в управляющие камеры реле 3 .и 19. Тогда сигнал с. выхода элемента 1 сравнения пропорционального звена, -йроходя через повторитель 10, реле 3, переменный дрос-. сель б, поступает на минусовую камеру элемента умножения на постоянный коэффициент 7. В это время отключается реле 2 и переменные дроссели 4 и 5. И регулятор работает как линейный с коэффициентом усиления К (Kg ра-. вен проводимости переменного дросселя б (Проводимость постоянного дросселя 8). При этом одновременно элемент 16 сравнения включает интегральное звено, т.е. регулятор начинает действовать как линейный пропорционально-интегральный регулятор. Интегральное звено реализует следующее, воздействие VP8b,X.(Pn-P3 dt. P и выход пропорционального звена, .суммируясь на сумматоре 22, . Рвтх...(РпЛ {1РпЛ 1.. поступают на выход регулятора. Когда система работает в устано-вившемся режиме, регулятор минимизирует деятельность исполнительного ме ханизма, так как он создает посто нный управляющий сигнал исполнительнр го механизма во время установи вшихся условий небольшой сяиибки. е вйбирается в зависи эсти от характера регу лируемого объекта. А при P(j + е j: IP I + Рд , на выходе элемента 16 сравнения получается сигнал О .«Тогда сигнал с выхо да элемента 1 сравнения пропорционал ного звена, проходя через повторител 10, верхний коммутируемый выход реле 3, реле 2, переменные дроссели 4 и 5 поступает в минусовую камеру элемент 7умножения на постоя«ный коэффициен 8зависимости от S пропорциональное звено реализует следующее выражение БЫх,7 К(Рп-Р;)-Р, , S о, LKonpK . Надо отметить, что в это время отключены переменные дроссели 6 и 20 и значит, отключено интегральное звено. На выходы сумматора 22 подаются давле ние с выхода пропорционального звена выхода интегрального звена в момент его включения Р, и опорное давление. На выходе сумматора 22 получается сиг нал РБЫХ.22-() + Рн А это позволяет при болыиих ошибках использовать преимущество СПС-максиМсшьное усиление при переходных процессах, чтобы свести к минимуму время реакции и чувствительность систеьы на изменения объекта и изменения возмущения. Такое выполнение регулятора, т.е. функционирование его при больших- отклонениях как регулятор с переменной структурой, а при малых - как линей: ный, обеспечивает высококачественноё регулирование объектов. Так включение регулятора с переменной структурой при больших рассогласованиях с максимальным быстродействием приводит систему к некоторой устанавливаемой зоне малых отклонений, при достижении которой регулятор перестраивается в линейный пи-регулятор, что позволяет плавно управлять исполнительным механизмом, тем самым снимаются автоко лебания при регулировании инерционных объектов. Таким образом, использованием пре муществ регуляторов с переменной и жесткой структурой йа различных этапах переходных процессов достигается высокоточное регулирование. -Формула изобретения Пневматический регулятор, содержащий подключенное к каналам параметра и задания интегральное звено, пропорциональное звено, состоящее из элемента сравнения, первого и второго реле и элемента умножения на постоянный коэффициент, выход которого подключен к первому входу выходного сумматора, подключенный к входным каналам параметра и задания формирователь функции переключения, состоящий из элемента сравнения, выход которого соединен с одним из входов элемента ИЛИ, другой вход которого связан с выходом элемента сравнения пропорционального звена, повторителя, и подключенного к выходу элемента ИЛИ релейного дифференциатора, выход которого соединен с управляющей камерой первого реле пропорционального звена, и задатчик опорного давления,выход которого соединен с элементом умножения на постоянный коэффициент, элементом сравнения пропорционального звена,элементом сравнения J)op 1ирователя функции переключения,выходным сумматором и интегральным звеном, выход которого подключен к второму входу выходного сумматора. Подключенного выходом через усилитель к выходному каналу регулятора, отличающийся тем, что, с целью расширения функциональных возможностей регулятора, в нем установлены повторитель со сдвигом и элемент сравнения, причем вход повторителя со сдвигом соединен с выходом задатчика опорного давления, а выход подключен к плюсовой камере элемента сравнения, минусовая камера которого соединена с выходом элемента ИЛИ, выход элемента сравнения соединен с управляющей камерой второго реле пропорционального звена и входом интегрирующего звена, выход элемента сравнения пропорционального звена через повторитель соединен с проточными камерами второго реле, первый выход которого соединен с входами первого реле, а второй выход и выходы первого реле через переменные дроссели соединены с минусовой камерой элемента умножения на постоянный коэффициент. Источники информации, принятые во внимание при экспертизе 1.Берендс т.к. и др. Элементы и схемы пневмоавтоматики. М., Машиностроение , 1976, с. 143-, рис. 110. 2.Авторское свидетельство СССР по заявке W 24518644/24 КЛ. G 05 В 11/fO, 02.0:3,77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Пневматическое управляющее устройство для регулирования температуры и уровня куба ректификационной колонны | 1978 |
|
SU752243A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU684508A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU622046A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU631869A1 |
| Система управления процессом каталитической сополимеризации | 1979 |
|
SU868704A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический пропорциональный регулятор | 1978 |
|
SU746412A1 |
| Пневматический регулятор переменной структуры | 1975 |
|
SU566238A1 |