(Л
00
:о СП
оо
фиг.1
Изобретение относится к машиностроению, а именно к преобразоваип- лям вращательного движения в возврат но-качательное, и может быть исполь- эовано в различных устройствах, например в регуляторах частоты вращения, в машинах объемного вытеснения и т .По
Цель изобретения - уменьшение га- баритов механизма путем обеспечения возмоАности приближения направляющей к осям вращения кривошипа и коромысла и повышения надежности путем обеспечения гармонических колебаний коромысла.
На фиг, 1 изображена схема механизма, шатуны которого связаны с ползуном каждый отдельным шарниром на фиг с 2 - то же, профильная проек- ция на фиг о 3 - схема механизма, у которого разность длин первого и второго шатунов соответственно равна разности длин кривошипа и коромыслаj на фиг. 4 - то же, профильная проек- ция; на фиг. 5 - схема механизма, у которого сумма длин первого и второго шатунов соответственно равна сумме длин кривошипа и коромысла; на фиг. 6 - то же, профильная проек- цияi на фиг. 7 - кривые зависимостей угловых положений коромысла от углов поворота кривошипа для вариантов механизмов.
Кривошипно-ползунный механизм содержит основание 1, размещенные на нем прямолинейную направляющую 2, кривошип 3 и коромысло А, оси которых совмещены. Первьй шатун 5 шар- нирно связан с кривошипом 3, а вто- рой шатун 6 - с коромыслом 4. Свободные концы шатунов 5 и 6 шарнирно связаны с ползуном 7, размещенным в направляющей 2,
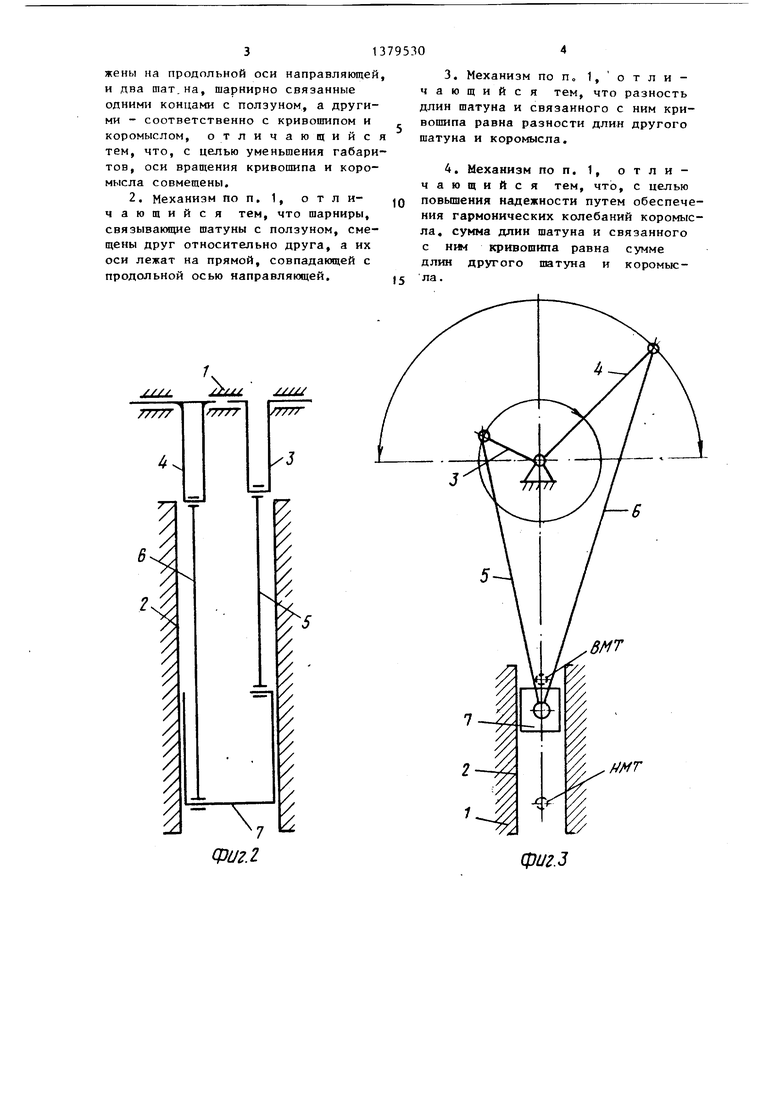
Шатуны 5 и 6 связаны с ползуном .7 отдельным шарниром каждый (фиг. 1 и 2), а их оси расположены на про- : дольной оси направляющей 2.
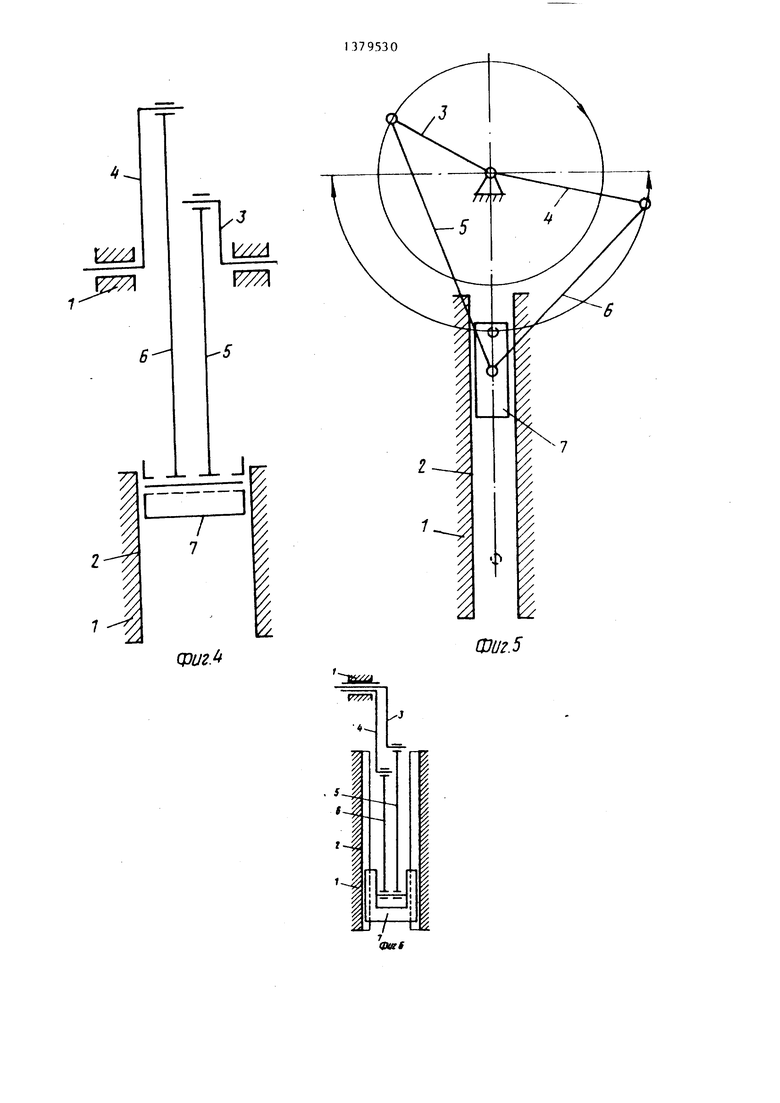
Разность длин первого шатуна 5 и кривошипа 3 (фиг. 3 и 4) равна разности длин второго шатуна 6 и коромысла 4,
Сумма длин первого шатуна 5 и кривошипа 3 (фиг. 5 и 6) равна сумме длин второго шатуна 6 и коромысла 4.
Механизм работает следующим образом.
Вращение кривошипа 3 через шатун 5 преобразуется в возвратно-поступа
т- -
- 10 м 15
20j 25 30й в 35, 40 дс:
50
302
тельное движение ползуна 7, которое через шатун 6 в свою очередь преобразуется в возвратно-качательное движение коромысла 4, ось вращения которого совпадает с осью вращения кривошипа 3.
Угловые перемещения коромысла 4 |С)лизки к гармоническим (фиг. 7).
При этом снять шатунов 5 и 6 с ползуном 7 отдельными шарнирами, оси |t;oTopbix расположены на оси направляющей 2, обеспечивает минимизацию габаритов механизма при оптимальных с точки зрения повышения механического К11Д и улучшения динамических характеристик соотношениях длин шатунов и связанных с ними кривошипа и коромысла (например, при равенстве отношений длины первого шатуна 5 к длине кривошипа 3 и длины второго шатуна 6 к длине коромысла 4.
Условие равенства разностей длин первого и второго шатунов 5 и 6 соответственно с длинами кривошипа 3 и коромысла 4 также обеспечивает уменьшение габаритов механизма за счет приближения н аправляющей к оси вращения кривошипа и коромысла и дополнительно позволяет упростить гехнологию изготовления механизма за счет возможности совместной обработки отверстий в шатунах под шарниры с совмещенными осями (например, в кондукторе, в сборе с кривошипом и коромыслом).
Условие равенства сумм длин первого и второго шатунов 5 и 6 соответственно с длинами кривошипа 3 и коромысла 4 дает возможность получить строго гармонический характер колебаний коромысла 4 при равномерном вращении кривошипа 3, дополнительно упростить технологию изготовления механизма за счет возможности выполнения двухопорного вала коромысла сплошным (т.е. не коленчатым), что возможно также, когда сектор колебаний коромысла 4 обращен к направляющей 2 (фиг, 1 и 2),
Формула изобретения
1. Кривошипно-ползунный механизм, содержащий основание, установленные на нем прямолинейную направляющую с ползуном, а также кривошип и коромысло, оси вращения которых расположены на продольной оси направляющей, и два шат.на, шарнирно связанные одними концами с ползуном, а другими - соответственно с кривошипом и коромыслом, отличающийся тем, что, с целью уменьшения габаритов, оси вращения кривошипа и коромысла совмещены.
2. Механизм по п, 1, отличающийся тем, что щарниры, связывающие шатуны с ползуном, смещены друг относительно друга, а их оси лежат на прямой, совпадающей с продольной осью направляющей.
f/
хЛ/уу
///Z/
3.Механизм поп, 1, отличающийся тем, что разность длин шатуна и связанного с ним кривошипа равна разности длин другого шатуна и коромысла.
4.Механизм по п. 1, отличающийся тем, что, с целью повышения надежности путем обеспечения гармонических колебаний коромысла, сумма длин шатуна и связанного
с ним кривошипа равна сумме длин другого шатуна и коромысла.
A /Vr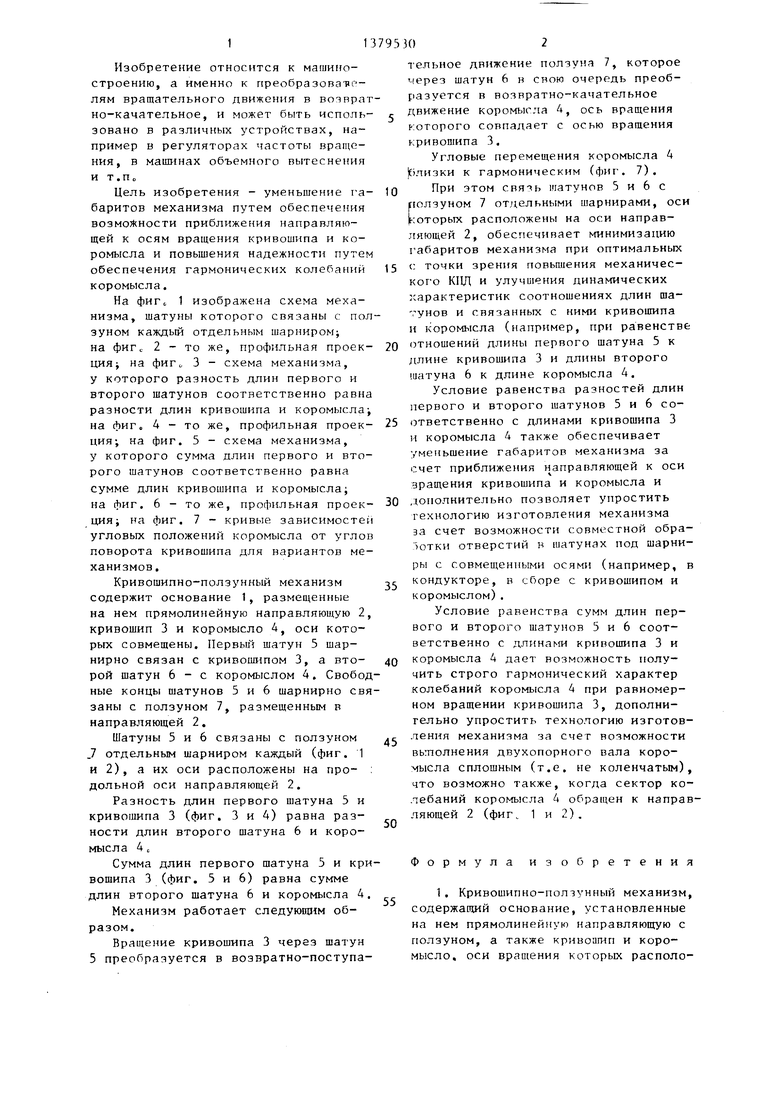
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный механизм | 1984 |
|
SU1221416A1 |
| Гармонический генератор | 1975 |
|
SU533933A1 |
| Генератор гармонических колебаний | 1983 |
|
SU1130418A1 |
| ДВУХСТЕПЕННОЙ СТЕНД ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ | 2007 |
|
RU2367921C2 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2224695C2 |
| Кривошипно-шатунный механизм | 2014 |
|
RU2613748C2 |
| Генератор гармонических колебаний | 1979 |
|
SU844080A1 |
| Механический генератор гармонических колебаний | 1974 |
|
SU531163A1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1999 |
|
RU2165874C1 |

Изобретение относится к машиностроению. Цель изобретения - уменьшение габаритов механизма путем обеспечения возможности приближения направляющей к осям вращения кривошипа и шатуна. Совмещение осей вращения кривошипа 3 и коромысла 4 и расположение этих осей на продольной оси направляющей 2 и ползуна 7 позволяет оба шатуна 5 и 6, кинематически связывающих соответственно кривошип 3 и коромысло 4 с ползуном 7, разместить с одной стороны последнего, что и обеспечивает достижение поставленной цели. 3 з.п. ф-лы, 7 ил.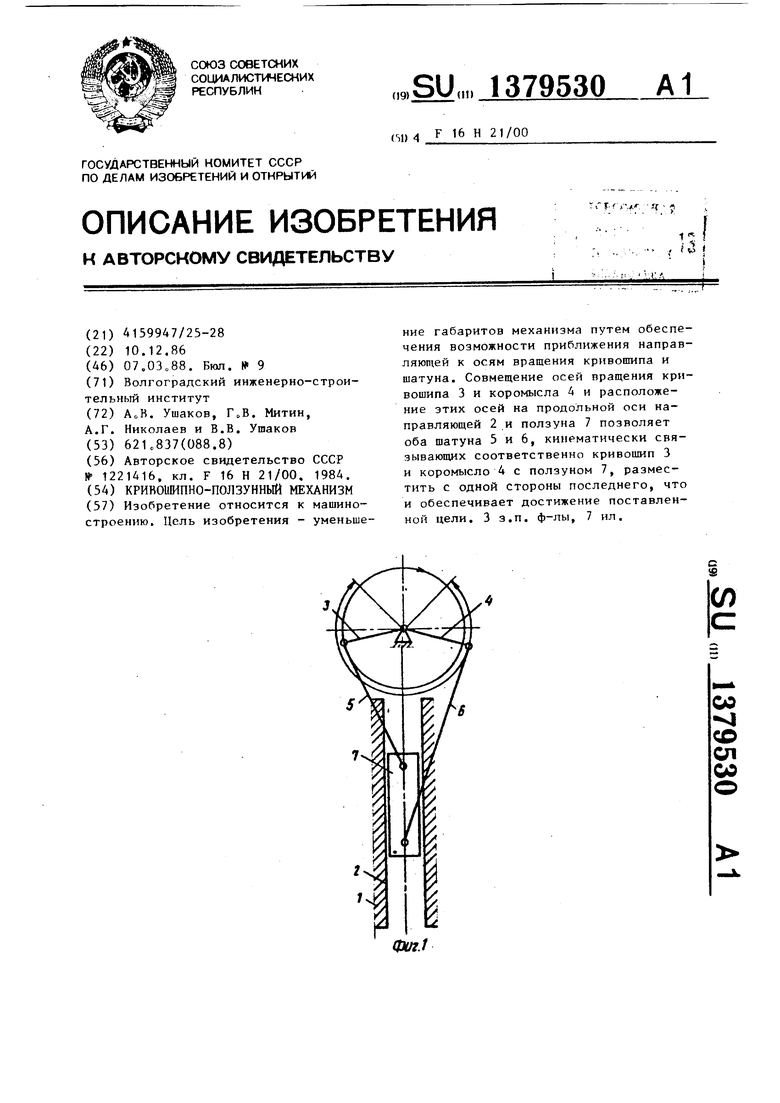
Фи2.1
фиг.з
Фиг.
Фиг. 5
rapnoHut ec a
I ffpt/SCTA
:
f20 ropMOHui ec af
ffpuStjfj f/Apf/Sofff /(OJieffofft/O /fo- fTo (pi/z. 5t/S 150
780
yz-ffoSoe MOpa i /cjto, od фиг, 7
A OJTfffQf/t l/ MOpOMb/cjra r oQX/i.
| Кривошипно-ползунный механизм | 1984 |
|
SU1221416A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
